一种串联多气腔变刚度软体机器人驱动器及其应用的制作方法
1.本发明涉及医疗器械技术领域,具体涉及一种串联多气腔变刚度软体机器人驱动器及其应用。
背景技术:
2.康复机器人手套是一款针对中风患者手部运动功能康复的智能设备,针对手指痉挛、麻痹、瘫痪等症状进行锻炼,症状得到极大的改善,通过仿生气动人工肌肉驱使手指关节活动能够同时帮助作用于脑部神经,促进运动康复。
3.但是,现有的康复手套,其驱动器都是以整根手指为整体进行弯曲,及指骨对应部分也会弯曲,而一旦驱动器发生弯曲,指骨与驱动器之间就会发生脱离,影响恢复效果。
技术实现要素:
4.本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种串联多气腔变刚度软体机器人驱动器及其应用。
5.为了实现本发明之目的,本技术提供以下技术方案。
6.在第一方面中,本技术提供一种串联多气腔变刚度软体机器人驱动器,所述驱动器包括腔体,所述腔体内沿其轴向设置多个串联的气腔,且位于最前端的气腔前端封闭,位于最后端的气腔尾端设有第一气道,并通过气管连接驱动气源,相邻两个气腔之间通过第二气道进行连通。
7.在第一方面的一种实施方式中,所述第二气道内设有非膨胀结构。
8.在第一方面的一种实施方式中,所述腔体内设有骨架,所述骨架位于所述气腔的外侧。
9.在第一方面的一种实施方式中,所述骨架为一体式结构,包括多个依次连接的重复单元,每个重复单元包括依次连接的顶部结构、第一连接结构、底部结构以及第二连接结构,其中,所述顶部结构垂直于腔体的轴线方向,且所有重复单元的顶部结构均匀分布且平行,所述底部结构位于腔体设置限制结构的一侧,所述骨架的截面为圆形、椭圆形、方形或者半圆形,所述骨架的材质为刚性材质。
10.在第一方面的一种实施方式中,所述腔体的外部固定有多块限制结构,所述限制结构的位置与所述气腔的位置相对应,且所述限制结构用于限制与其固定的腔体部分无法伸缩。
11.在第一方面的一种实施方式中,所述限制结构的材料为可弯曲但限制伸缩的材料。
12.在第一方面的一种实施方式中,所述腔体的材料为可伸缩的柔性材料。
13.在第二方面,本技术还提供一种如上所述串联多气腔变刚度软体机器人驱动器的应用,其特征在于,所述驱动器用于康复手套,所述康复手套包括手套本体,且在手套本体的至少一根手指上设有所述的串联多气腔变刚度软体机器人驱动器。
14.在第二方面的一种实施方式中,每个驱动器内所述气腔以及限制结构的数量及位置与其驱动的手指的指关节数量及位置相匹配。
15.在第二方面的一种实施方式中,所述手套本体上固定单元。
16.与现有技术相比,本发明的有益效果在于:
17.(1)本发明的驱动器,在使用时只会驱动指关节进行弯曲(正压状态下)及伸直(负压状态下),而不会对指骨部分产生挤压,跟人手指的贴合度更好,人机交互体验更佳,康复治疗效果好;
18.(2)结构简单,便携性好。
附图说明
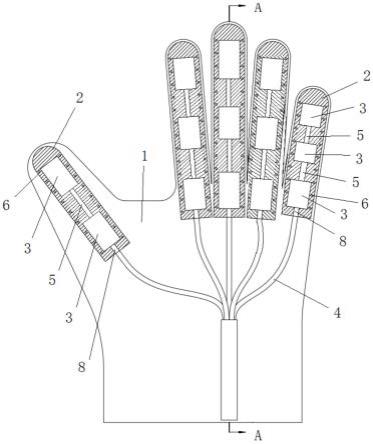
19.图1为实施例1中康复手套的结构示意图;
20.图2为图1中a-a的截面示意图;
21.图3为实施例1中骨架的结构示意图。
22.在附图中,1为手套本体,2为腔体,3为气腔,4为气管,5为第二气道,6为骨架,7为限制结构,8为第一气道。
具体实施方式
23.除非另作定义,在本说明书和权利要求书中使用的技术术语或者科学术语应当为本发明所属技术领域内具有一般技能的人士所理解的通常意义。本文中列举的所有的从最低值到最高值之间的数值,是指当最低值和最高值之间相差两个单位以上时,最低值与最高值之间以一个单位为增量得到的所有数值。
24.以下将描述本发明的具体实施方式,需要指出的是,在这些实施方式的具体描述过程中,为了进行简明扼要的描述,本说明书不可能对实际的实施方式的所有特征均作详尽的描述。在不偏离本发明的精神和范围的情况下,本领域技术人员可以对本发明的实施方式进行修改和替换,所得实施方式也在本发明的保护范围之内。
25.在一种具体实施方式中,本技术提供一种串联多气腔变刚度软体机器人驱动器,所述驱动器包括腔体,所述腔体内沿其轴向设置多个串联的气腔,且位于最前端的气腔前端封闭,位于最后端的气腔后端设置第一气道,并通过气管连接驱动气源,相邻两个气腔之间通过第二气道进行连通。在第一气道的尾端可以设置插接头,便于气管的拆装。在本技术中公开的驱动气源,可以是充气式的装置,也可以是抽气式的装置,也可以抽气、充气一体式的装置,其目的就是改变气腔内的气压值,使得气腔膨胀或收缩。本技术设置多个串联式的气腔,在气腔内气压发生改变时,只有气腔外围的腔体会发生弯曲,第二气道外围的腔体保持直线型。
26.在一种具体实施方式中,所述第二气道内设有非膨胀结构。该非膨胀机构的形式不定,如在第二气道位置设置不锈钢或者其他无弹性的材质,使得第二气道不会膨胀或收缩,也无法伸长或缩短,从而使得第二气道外围的腔体能保持直线结构。
27.在一种具体实施方式中,所述腔体内设有骨架,所述骨架位于所述气腔的外侧。骨架能够限制腔体在径向向外膨胀或向内收缩,即气腔在充气或抽气后只能伸长或缩短。
28.在一种具体实施方式中,所述骨架为一体式结构,包括多个依次连接的重复单元,
每个重复单元包括依次连接的顶部结构、第一连接结构、底部结构以及第二连接结构,其中,所述顶部结构垂直于腔体的轴线方向,且所有重复单元的顶部结构均匀分布且平行,所述底部结构位于腔体设置限制结构的一侧,所述骨架的截面为圆形、椭圆形、方形或者半圆形,所述骨架的材质为刚性材质,如不锈钢或铝合金。采用这样结构的骨架,可以明显提高驱动器的承受气压范围,也能增大驱动器的驱动力,并能增大该驱动器的弯曲角度。
29.在一种具体实施方式中,所述腔体的外部固定有多块限制结构,所述限制结构的位置与所述气腔的位置相对应,且所述限制结构用于限制与其固定的腔体部分无法伸缩。限制结构的设置,使得腔体的一侧无法伸长,而同截面下的其余部分腔体会随着气腔的伸缩而伸缩,这就导致在同一截面的腔体,部分无法伸缩,而其余部分可以伸缩,这就使得气腔外围的腔体发生弯曲。
30.在一种具体实施方式中,所述限制结构的材料为可弯曲但限制伸缩的材料,比如可以选择工程塑料、尼龙、纤维布中的一种。
31.在一种具体实施方式中,所述腔体的材料为可伸缩的柔性材料,比如可选择硅胶、橡胶或pvc中的一种。
32.在一种具体实施方式中,若将上述驱动器安装在手套本体上,则可得到一种康复手套。
33.在一种具体实施方式中,每个驱动器内所述气腔以及限制结构的数量及位置与其驱动的手指的指关节数量及位置相匹配。由于气腔对应指关节,第二气道对应指骨,因此本发明的康复手套在使用时,只有指关节会被驱动弯曲,指骨部分不会弯曲,从而使得驱动器与手指始终保持贴合状态。
34.在一种具体实施方式中,所述手套本体上固定单元。固定单元的结构不定,如采用绑带,其主要目的就是为了手套本体能与患者的手掌进行固定。
35.实施例
36.下面将对本发明的实施例作详细说明,本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
37.实施例1
38.一种康复手套,其结构如图1、图2所示,包括手套本体1,该手套本体1可以进行定制,使患者的手掌穿戴进该手套本体1时,完全紧贴。在手套本体1的5根手指上均设有一个串联式多气腔软体机器人驱动器,其驱动器包括硅胶材质的腔体2,在腔体2内设有2~3个依次串联的气腔3,其中,大拇指上设有2个气腔3,其余手指设有3个气腔3,在同一手指上的两个相邻气腔3之间通过第二气道5连通,位于手指最前端的气腔3顶部封闭,位于手指最后端的气腔3底部设置第一气道8,并通过气管4连接驱动气源(图上未显示驱动气源)。其中,第二气道5管壁处设有铝合金环(图上未显示铝合金),使得第二气道5无法膨胀、缩小、伸长及缩短。在腔体2内设有不锈钢骨架6,其形状如图3所示,该骨架6围绕气腔3外分布,骨架6使得气腔3无法进行径向膨胀或径向收缩。在腔体2的外部、与气腔3位置相对应的部位设置不锈钢的限制结构7。
39.使用时,将手套本体1穿戴在使用者的手上,利用驱动气源向驱动器内充气,当气腔3充气后,位于气腔3外围的腔体2发生膨胀或伸长,由于骨架6的存在,腔体2无法径向膨
胀,因此腔体2只能轴向伸长。同时,由于限制结构7的存在,使得腔体2的一个侧面无法伸长,而同截面其余部分的腔体2伸长,这就导致这部分腔体2会发生弯曲。由于气腔3的位置与使用者手指关节的位置相对用,从而驱使指关节进行弯曲。另外,由于铝合金环的存在,使得第二气道5无法伸长及膨胀,因此,第二气道5外围的腔体2保持原样。通过上述操作,驱使使用者的手指进行弯曲锻炼,起到康复效果。
40.同理,驱动气源也可选择为抽真空泵,即将气腔3内的气体抽出,使得腔体2缩短,原理与充气类似,只是弯曲方向与充气相反。
41.上述对实施例的描述是为了便于本技术领域的普通技术人员能理解和应用本技术。熟悉本领域技术的人员显然可以容易地对这些实施例做出各种修改,并把在此说明的一般原理应用到其它实施例中而不必付出创造性的劳动。因此,本技术不限于这里的实施例,本领域技术人员根据本技术披露的内容,在不脱离本技术范围和精神的情况下做出的改进和修改都在本技术的范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1