一种考虑交互舒适性的上肢康复外骨骼的制作方法
本发明涉及康复医疗器械领域,具体涉及一种考虑肩部舒适性的上肢康复外骨骼。
背景技术:
1、目前对于偏瘫患者上肢的康复训练存在有一系列的问题,目前国内现行的主要方法是通过康复治疗师一对一地辅助患者进行训练,但是存在问题也很多,如工作强度大,效率低,大多数康复过程过于依赖康复治疗师的经验判断,并不能进行较好的量化评估,并且很少考虑到人机交互过程中的舒适性问题,现有上肢康复机器人仅仅是考虑关节的训练,而忽略了训练过程中因为上肢与机器人关节轴匹配度不高存在的错位情况,以致于会产生作用于关节的冗余有害力,从而容易造成偏瘫患者患处的二次伤害(专利“上肢训练与评估设备(a6-2)(授权公告号:cn306655766s)”);因此,亟需一种康复设备,可以代替康复治疗师的工作,辅助病人进行肩关节、肘关节、前臂的康复训练,提高患者康复训练的参与感和相应的治疗效果。
技术实现思路
1、针对上述存在的问题,提出了一种考虑肩部舒适性的上肢康复外骨骼,旨在有效降低成本、降低康复治疗师的工作强度、提高相应的工作效率以及提高人机交互过程中的舒适性,进而保证患者康复过程中的安全性、有效性和舒适性。该发明通过分布式电机提供各个关节运动所需要的驱动力,拖动或辅助患者肩部、肘部和前臂完成康复训练。
2、本发明的目的至少通过如下技术方案之一实现。
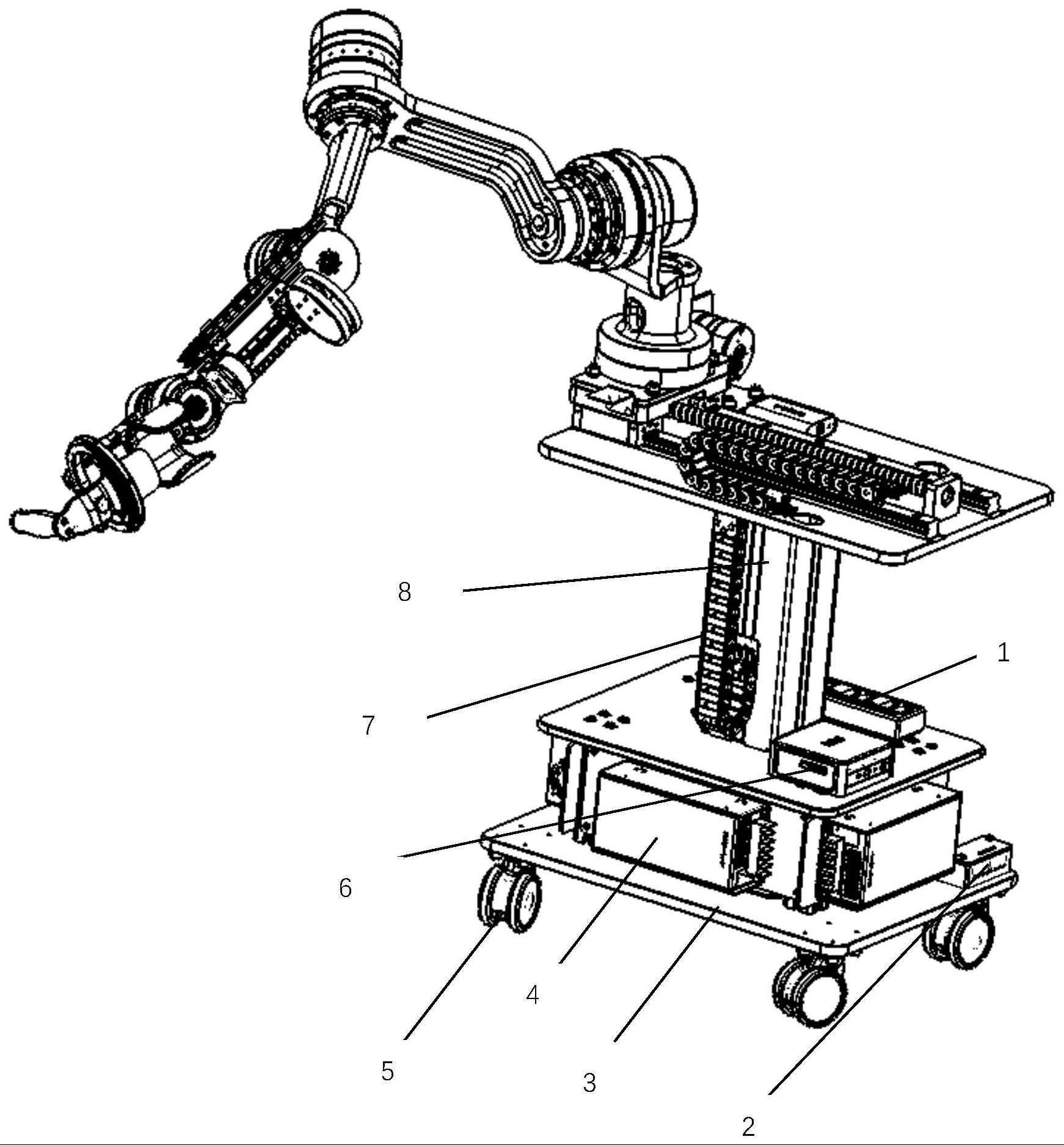
3、一种考虑肩部舒适性的上肢康复外骨骼,包括机架模块、肩部第一关节18度调节模块、腕部模块、关节模组模块、上臂微调模块和上肢调节模块和肩部关节支撑件模块;
4、所述机架模块包括升降机构和设置在升降机构上的外骨骼换臂调节机构,所述升降机构用于调节肢康复外骨骼离地面的垂直距离;
5、所述肩部第一关节18度调节模块设置在外骨骼换臂调节机构上,所述肩部第一关节18度调节模块用于上肢康复外骨骼第一关节轴线偏移,可满足左右上肢范围调节;
6、所述关节模组模块用于驱动上肢康复外骨骼肩部三个关节和肘关节并且通过关节力矩传感器获取人机交互力,包括肩部第一关节模组、肩部第二关节模组、肩部第三关节模组和肘部关节模组,肩部第一关节模组设置在所述肩部第一关节度调节模块上,肩部第一关节模组通过第一连杆与肩部第二关节模组连接,肩部第二关节模组通过第二连杆与肩部第三关节模组连接;
7、所述上臂微调模块用于调节上肢沿肱骨方向位置,提高人机交互的舒适性,所述上臂微调模块与肩部第三关节模组的输出端连接;
8、肘部关节模组设置在所述上臂微调模块上,且肘部关节模组的输出端与前臂调节机构连接,前臂调节机构用于调节外骨骼的前臂的长度,且前臂调节机构包括用于与人体前臂连接的前臂臂套;
9、所述腕部模块与前臂调节机构连接,所述腕部模块用于旋转前臂、承重前臂重要以及固定前臂作用。
10、进一步地,所述机架模块包括电气元件、升降机构、线缆导向机构、外骨骼换臂调节机构;所述机架模块用于承受上肢康复外骨骼和人体上肢的重量、电气元件封装、左右换臂、垂直升降等功能。
11、优选地,所述机架模块中的电气元件包括插板、电源、can模块、微型电脑和分线器;所述微型电脑用于作为上肢外骨骼控制系统给的主控单元,所述can模块用于接收上肢康复外骨骼can总线上的信号;所述升降机构包括立柱式升级台,用于调节上肢康复外骨骼离地面的垂直距离;所述线缆导向机构是坦克链,用于束线,并且整个上肢康复外骨骼系统里面的坦克链都是线缆导向作用,其他部分的坦克链统一使用坦克链描述。
12、进一步地,所述外骨骼换臂调节机构包括丝杆传动机构和皮带传动机构;所述丝杆传动机构包括丝杆、轴承座和导轨,而且所述皮带传动机构包括主皮带轮、副皮带轮、皮带和电机;所述皮带传动机构用于驱动副皮带轮,而副皮带轮与所述肩部第一关节度调节机构连接,并且通过所述丝杆传动机构导向完成上肢康复外骨骼的左右移动。
13、进一步地,所述肩部第一关节度调节模块包括旋转下盘、旋转上盘、丝杆传动滑块连接下座、丝杆传动滑块连接上座、插销座、插销孔和肩部第一关节模组连接件;所述丝杆传动滑块连接下座与滑块导轨机构的滑块部分相连接,当所述丝杆传动机构中的电机驱动时,此时可以通过皮带正反转使能上肢康复外骨骼左右滑动;插销座上的孔与插销孔通过外置插销同轴锁定位置,满足外骨骼与基座之间的度关系,固定在偏离度的位置,这是所述外骨骼能正常运行的条件,垂直平台朝前的偏离角度为18度,该18度位置是手动推动旋转上盘旋转,插销座会随着滑块进行旋转,直到插销孔对准插销座。丝杆传动滑块连接下座与丝杆连接,丝杆传动滑块连接上座与丝杆传动滑块连接下座连接,旋转下盘与旋转上盘连接;
14、进一步地,所述关节模块中每个关节模组均包括伺服电机、与伺服电机连接的电机-扭矩传感器连接件、与电机-扭矩传感器连接件连接的扭矩传感器-负载连接件和与扭矩传感器-负载连接件连接的扭矩传感器。
15、进一步地,所述肩部关节支撑件模块包括第一连杆和第二连杆,所述第一连杆用于作为肩部第一关节模组和第二关节模组的载体支撑件,所述第二连杆用于作为肩部第二关节模组和第三关节模组的载体支撑件,并且所述第一连杆和第二连杆内部都开过槽,如所述第一连杆开槽,槽的目的都是用于藏线缆;所述肩部第二关节模组的输出端与所述第二连杆连接时通过连接件连接。
16、所述第一连杆呈弯折,弯折角度为60度,并且所述第二连杆与所述第一连杆当位于同一平面时,此时两连杆之间的角度为120度。
17、进一步地,述上臂微调模块包括上臂长度调节机构、上臂丝杆传动机构和上臂臂套,
18、上臂长度调节机构包括支撑板和上臂长度导轨,上臂长度导轨通过上臂支撑件与肩部第三关节模组连接,支撑板滑动设置在上臂长度导轨上;
19、上臂丝杆传动机构设置在支撑板上,上臂丝杆传动机构包括丝杆和设置在丝杆上的螺母块,上臂臂套与螺母块连接。
20、进一步地,上臂微调模块还包括力传感器,力传感器设置在上臂臂套与螺母块之间。
21、进一步地,所述前臂调节机构包括前臂支撑件、前臂臂套、连接件、腕部模块连接件和中间连接件;所述臂套约束上肢前臂,并且通过所述中间连接件与所述连接件固连,同时,所述连接件固连在所述前臂臂套;所述前臂支撑件固连在肘部关节模组的输出端,从而引起前臂运动;所述腕部模块连接件与前臂支撑件通过滑块导轨分别连接,实现自由度滑动,这里在运动自由度被释放,这也是由于人体肘关节轴与外骨骼关节轴不对中时,产生错位,引起不舒适感觉,因此被释放。
22、进一步地,所述腕部模块包括腕部电机、托架、握把、固定架、小齿轮、挡圈和大齿轮;所述托架用于放置上肢腕部;所述握把用于患者手部定位;所述小齿轮则是通过所述腕部电机驱动,又因为所述小齿轮转动带动大齿轮转动,而所述大齿轮与托架固连在一起,因此当所述腕部电机驱动时,可以驱动所述托架和握把一起转动,从而引导前臂完成旋转运动。
23、与现有技术相比,本发明的优点在于:
24、本发明能代替康复治疗师的工作,辅助患者进行肘部与前臂的精确康复训练,可以有效辅助患者生活中无法自行完成的工作,增加患者在康复过程中对生活的自信心,有利于提高康复疗效;重点考虑了肩关节中心不对中引起的不舒适性问题以及前臂调节机构可以自适应调节肘部不对中情况,有利于提高患者的舒适感以及康复的安全性。
- 还没有人留言评论。精彩留言会获得点赞!