一种介入机器人从端的制作方法
本技术涉及医疗器械设备,更具体地,涉及一种介入机器人从端。
背景技术:
1、介入机器人主要采用主从端操作的结构。主端为操作端,从端为执行端,主端与从端之间通过控制装置连接,操作者在主端一侧进行操作,从端的控制装置接收操作信息并驱动从端的细长型医疗器械的运动。
2、现有的介入机器人从端进行导管递送时,两驱动装置分别夹持于导管的两端,通过控制两驱动装置的协同运动,完成导管的推送或者回撤。因递送过程中,导管全程保持拉直状态,因此,两驱动装置之间需要预留与导管长度相等的空间,从而导致从端整体长度长,占用空间大,尤其是递送多根导管时,因需要使用更多的驱动装置,从端整体长度长、占用空间大的缺陷更加突出,不仅增加了产品成本,还不利于产品安装。
技术实现思路
1、本技术实施例所要解决的技术问题是现有的介入机器人从端的整体长度长,占用空间大,不仅增加了产品成本,还不利于产品安装。
2、为了解决上述技术问题,本技术实施例提供一种介入机器人从端,采用了如下所述的技术方案:
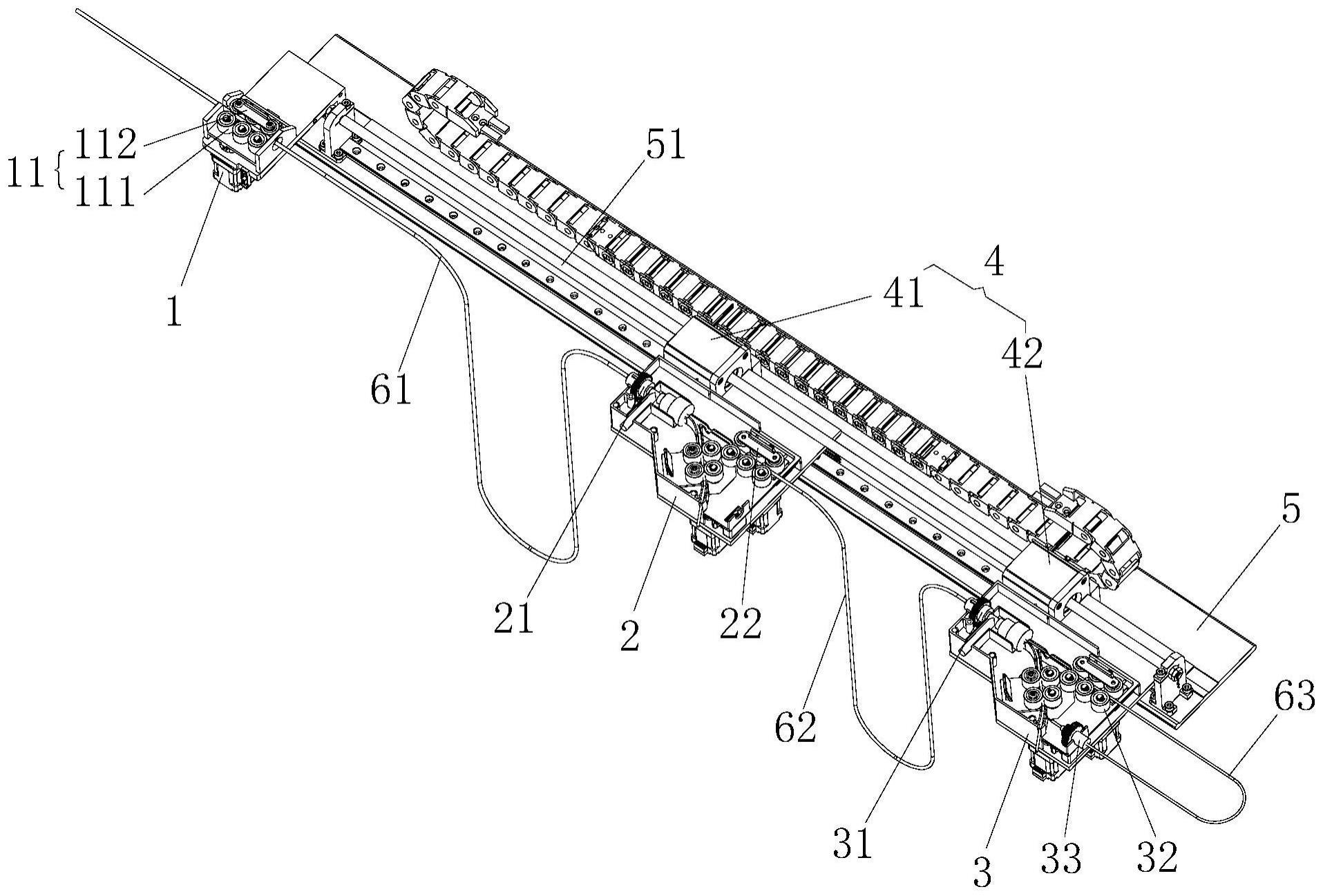
3、一种介入机器人从端,用于递送细长型医疗器械,所述细长型医疗器械包括导丝及至少两个导管,后一所述导管至少部分穿设入前一所述导管内,所述导丝部分穿设入后一所述导管内;
4、所述介入机器人从端包括:驱动装置、动力装置、感应装置及控制装置;
5、所述动力装置用于驱动所述驱动装置沿细长型医疗器械的轴向移动;
6、所述驱动装置用于驱动所述细长型医疗器械沿轴向移动;
7、所述感应装置用于检测所述细长型医疗器械的夹持状态;
8、所述驱动装置、所述动力装置、所述感应装置均与所述控制装置连接;
9、所述细长型医疗器械包括导丝及至少两个导管,后一所述导管至少部分穿设入前一所述导管内,所述导丝部分穿设入后一所述导管内;
10、初始状态下,任一所述导管呈弯曲状态夹持于相邻两所述驱动装置上,
11、工作时,所述控制装置控制所述驱动装置启动,驱动对应的所述导管和所述导丝沿轴向移动;当感应装置检测到呈弯曲状态的一所述导管处于拉直状态时,所述控制装置控制所述动力装置启动,所述动力装置驱动夹持同一所述导管的所述驱动装置协同运动,使被相邻两所述驱动装置夹持的所述导管保持拉直状态;或,当感应装置检测到任一的所述导管均处于拉直状态时,所述控制装置控制所述动力装置启动,所述动力装置驱动相应的所述驱动装置协同运动,使任一所述导管保持拉直状态。
12、进一步的,工作时,当任一所述导管处于拉直状态后,所述控制装置控制所述驱动装置启动,驱动处于拉直状态的所述导管旋转。
13、进一步的,所述介入机器人从端还包括检测装置,所述检测装置用于检测相邻两个所述驱动装置之间的距离,所述检测装置与所述控制装置连接,当所述检测装置检测到相邻两个所述驱动装置之间的距离为设定距离时,所述控制装置控制驱动相应所述驱动装置移动的所述动力装置停机。
14、进一步的,所述导管记为第一导管、第二导管,所述第二导管穿设入所述第一导管内,所述导丝穿设入所述第一导管与所述第二导管内;
15、所述驱动装置包括前端驱动装置、第一推送驱动装置、第二推送驱动装置;所述动力装置包括第一动力源与第二动力源;所述感应装置包括第一感应组件与第二感应组件;
16、初始状态下,所述第一导管呈弯曲状态夹持在所述前端驱动装置和所述第一推送驱动装置之间,所述第二导管呈弯曲状态夹持在所述第一推送驱动装置和所述第二推送驱动装置之间;
17、工作时,所述控制装置控制所述前端驱动装置启动,驱动所述第一导管与位于所述第一导管内的所述第二导管和所述导丝共同递送,直至到达第一设定位置;其中,所述第一设定位置为所述第一感应组件检测到所述第一导管处于拉直状态的位置;
18、所述控制装置控制所述第一动力源启动,所述第一动力源驱动所述第一推送驱动装置向靠近所述前端驱动装置方向移动,所述前端驱动装置与所述第一推送驱动装置协同递送所述第一导管与位于所述第一导管内的所述第二导管和所述导丝,直至到达第二设定位置,所述控制装置控制所述第一推送驱动装置与所述第一动力源停机;其中,所述第二设定位置为所述第一推送驱动装置间隔所述前端驱动装置设定距离的位置。
19、进一步的,所述控制装置控制所述第一推送驱动装置与第二动力源启动,用于单独递送所述第二导管;
20、所述第二导管单独递送时,所述控制装置控制所述第一推送驱动装置启动,驱动所述第二导管递送,所述第二导管在所述第一导管内递送,直至到达第三设定位置;其中,所述第三设定位置为所述第二感应组件检测到所述第二导管处于拉直状态的位置;
21、所述控制装置控制所述第二动力源启动,所述第二动力源驱动第二推送驱动装置向靠近所述第一推送驱动装置方向移动,所述第一推送驱动装置与所述第二推送驱动装置协同递送所述第二导管与所述导丝,直至到达第四设定位置,所述控制装置控制所述第二动力源停机;其中,所述第四设定位置为所述检测装置检测所述第二推送驱动装置间隔所述第一推送驱设定距离的位置。
22、进一步的,所述第一导管递送过程中,所述控制装置控制第二感应组件检测所述第二导管的当前状态;
23、若,所述第二感应组件检测到所述第二导管处于拉直状态,则,所述控制装置控制所述第二动力源启动,所述第二动力源驱动第二推送驱动装置向靠近所述第一推送驱动装置方向移动,所述第一推送驱动装置与所述第二推送驱动装置协同递送所述第二导管与所述导丝,直至到达第四设定位置,所述控制装置控制所述第二动力源停机;其中,所述第四设定位置为所述检测装置检测所述第二推送驱动装置间隔所述第一推送驱设定距离的位置。
24、进一步的,所述前端驱动装置启动时,所述控制装置控制所述第一推送驱动装置驱动所述第二导管向远离所述前端驱动装置方向移动。
25、进一步的,所述驱动装置还包括导丝控制机构,单独控制所述导丝时,所述控制装置控制所述导丝控制机构启动,驱动所述导丝递送和/或旋转;
26、或,递送所述第一导管和/或所述第二导管时,所述导丝控制机构驱动所述导丝向远离所述前端驱动装置方向移动。
27、进一步的,所述第一感应组件包括扭力传感器;
28、所述控制装置控制所述扭力传感器实时检测所述前端驱动装置受到的拉力,若所述扭力传感器检测到拉力增大,则确定所述第一导管处于拉直状态;
29、或,
30、所述第一感应组件包括装设于所述前端驱动装置的第一压力传感器与装设于所述第一推送驱动装置的第二压力传感器;
31、所述控制装置控制所述第一压力传感器检测所述前端驱动装置作用于所述第一导管的递送力,控制所述第二压力传感器检测所述第一推送驱动装置作用于所述第一导管的递送力,
32、并在所述第一压力传感器和所述第二压力传感器均检测到所述递送力发生变化,则确定所述第一导管处于拉直状态。
33、进一步的,所述第二感应组件包括扭力传感器;
34、所述控制装置控制所述扭力传感器实时检测所述第一推送驱动装置受到的拉力,若所述扭力传感器检测到拉力增大,则确定所述第二导管处于拉直状态;
35、或,
36、所述第二感应组件包括装设于所述第一推送驱动装置的第三压力传感器与装设于第二推送驱动装置的第四压力传感器;
37、所述控制装置控制所述第三压力传感器检测所述第一推送驱动装置作用于所述第二导管的递送力,控制所述第四压力传感器检测所述第二推送驱动装置作用于所述第二导管的递送力,并在所述第三压力传感器和所述第四压力传感器均检测到所述递送力发生变化,则确定所述第二导管处于拉直状态。
38、与现有技术相比,本技术实施例主要有以下有益效果:
39、本技术提供的介入机器人从端,在初始状态下任一导管弯曲夹持在相邻的两驱动装置上,从而有效的缩短了相邻的两驱动装置之间的间距,既满足了递送多根导管的需求,又缩小了设备的整体长度,减小了设备的占用空间,实现了设备的小型化、低成本化;
40、通过驱动装置、动力装置、感应装置之间的协同动作下,实现将导管从弯曲状态递送至拉直状态,并确保导管为拉直状态后再进行协同推送的动作,完成导管递送到目标位置;此外,通过感应装置确保导管为拉直状态后立即启动协同推送的动作,避免导管被拉断,消除了设备的安全隐患,提高了设备运行的安全系数;
41、通过驱动装置、动力装置的协同动作下,控制后一导管在前一导管内移动、导丝在导管内移动,以此实现介入机器人从端的导管与导丝的连续递送。
- 还没有人留言评论。精彩留言会获得点赞!