一种基于四杆式的上肢康复机器人
本发明涉及一种基于基于四杆式的上肢康复机器人,属于康复医学和康复工程领域,尤其涉及一种平面上肢康复机器人。
背景技术:
1、中风病人对其偏瘫部位及早进行有针对性的康复练习能够提高甚至恢复独立生活和劳动能力,大大减少残疾的可能性。平面康复训练就是其中的一种训练方式。
2、现有的平面训练器械如四杆结构,功能简单,形式单一,仅满足固定轨迹的运动,使患者对康复运动失去兴趣,为满足早期患者的康复需求,设计一款具备轨迹可变的平面康复训练机器人十分必要,本设计利用滑动组件中的滑块的移动来改变机架杆的长度,进而使手柄处的运动轨迹发生改变,利用这种原理使患者进行不同轨迹的康复运动,实现多轨迹的康复运动。
技术实现思路
1、为解决现有的平面训练器械功能简单、形式单一和单一运动轨迹的问题,本实用新型一种基于四杆式上肢康复机器人,为患者提供一种可调节多轨迹的运动方式。
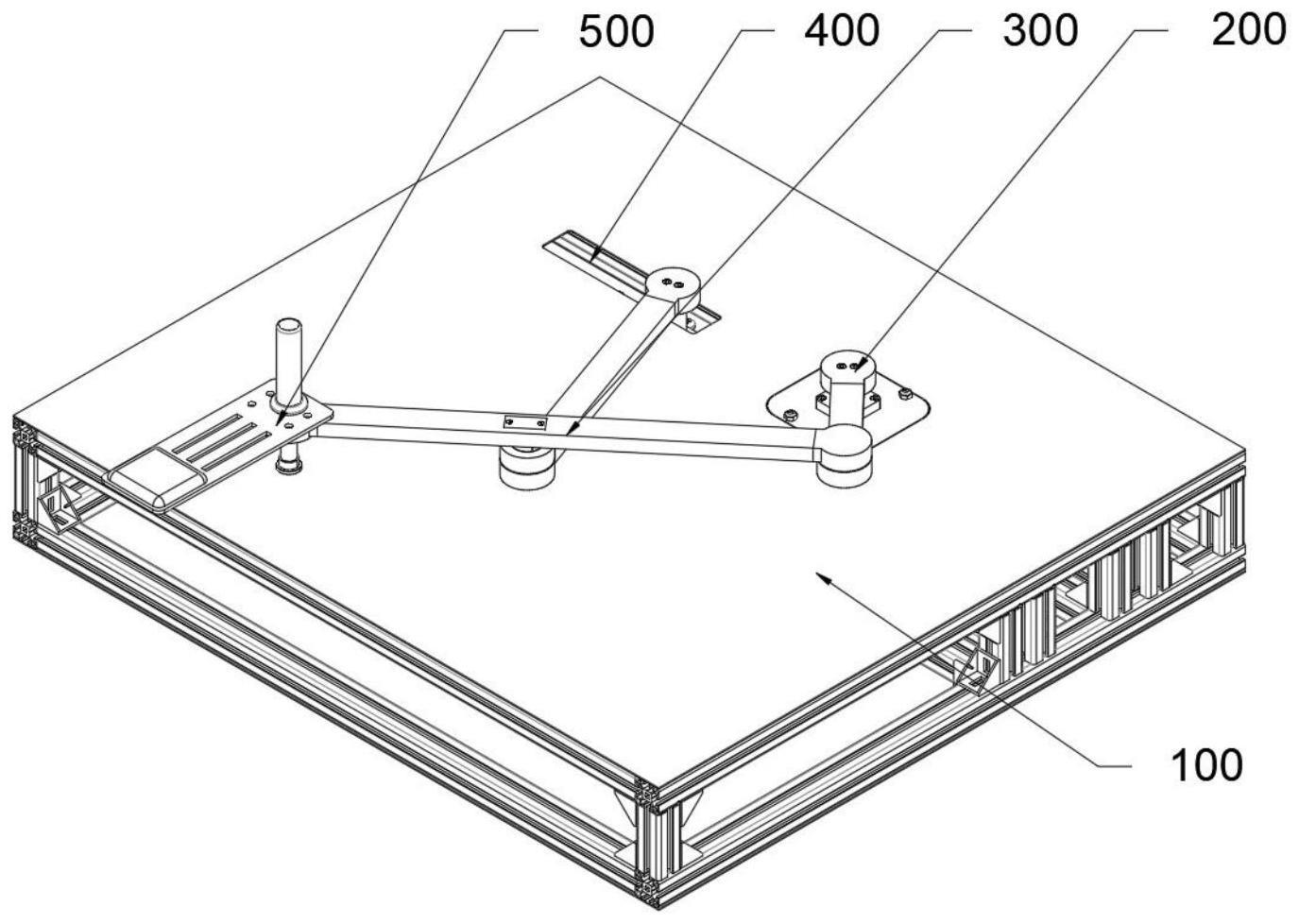
2、本发明所采用的技术方案是:所述种基于四杆式的上肢康复机器人,其特征在于:所述上肢康复机器人由工作面(100)、电机驱动组件(200)、连杆组件(300)、滑动组件(400)和手柄组件(500)组成;所述工作平面(100)和电机驱动组件(200)通过紧定螺钉实现紧固连接;所述连杆组件(300)与电机驱动组件(200)通过螺钉紧固连接;所述滑动组件(400)与工作平面(100)通过螺钉实现紧固连接;所述手柄组件(500)与连杆组件(300)通过螺钉紧固连接。
3、所述工作面(100)设有螺纹孔与型材进行连接,同时设有槽放置轴承板。
4、所述电木板(101)与型材(102)通过螺钉紧固连接;所述角铁(103)与型材(102)通过t型螺钉进行紧固连接。
5、所述电机轴块(201)与驱动轴(204)通过m6螺钉紧固连接;所述驱动轴(204)阶梯轴段卡在轴承(202)上,与所述联轴器(205)通过紧固摩擦来达到配合;所述轴承(202)与轴承板(203)通过螺钉紧固连接;所述轴承板(203)与型材(102)通过t型螺钉紧固连接;所述电机(207)与电机固定板(206)通过螺钉紧固连接,与联轴器(205)通过摩擦紧固连接;所述电机固定板(206)与型材(102)通过t型螺钉紧固连接;使电机可以同步带动杆件进行转动;电机为带有编码器的伺服电机。
6、所述杆1(301)与电机轴块(201)通过螺钉进行固定;所述下轴块1(302)与杆1(301)通过螺钉进行紧固连接;所述上轴块1(303)放入下轴块1(302)中,从下轴块1(302)下侧将轴承(302-1)套在上轴块1(303)上;所述底板(306-2)与上轴块1(303)通过螺钉紧固连接;所述轴承底盖(302-3)与下轴块1(302)通过螺钉紧固连接;所述杆2(304)与上轴块1(303)通过螺钉紧固连接;所述转轴块(306)与杆2(304)通过螺钉紧固连接;所述上轴块2(305)与转轴块(306)通过螺钉紧固连接;所述上轴块2(305)放入下轴块2(307)中,从下轴块2(307)下侧将轴承(306-3)套在上轴块2(305)上;所述底板(306-2)与上轴块2(305)通过螺钉紧固连接;所述轴承底盖(306-1)与下轴块2(307)通过螺钉紧固连接;所述密封板(308)与杆2(304)通过螺钉紧固连接;所述杆3(309)与下轴块2(307)通过螺钉紧固连接,与移动上轴块(401)通过螺钉紧固连接。
7、所述滑动组件(400)可由移动上轴块(401)、移动轴(402)、轴承(403)、弹性挡圈(404)、滑轨板(405)、滑块(406)、滑道(407)和固定板(408)组成;所述移动轴(402)为阶梯轴与轴承配合,下端有1mm的凹槽与弹性挡圈配合限制移动轴(402)上下的移动;所述轴承(403)放入滑轨板(405)通过螺钉固定;所述滑块(406)带有锁紧功能,滑块根据需求可以固定在所需的位置;
8、所述手柄组件(500)由手柄外层(501)、手柄内轴(502)、弹性挡圈(503)、轴承(504)、支撑块(505)、万向球(506)和轴承挡板(507)组成;所述手柄外层(501)带有手托可以使患者舒适进行康复运动;所述万向球(506)可以起到利用滑动摩擦代替由于弯矩对结构产生的影响。
9、本发明的有益效果是:利用一种基于四杆式的上肢康复机器人,利用滑动组件中的滑块的移动来改变机架杆的长度,进而使手柄处的运动轨迹发生改变,利用这种原理使患者进行不同轨迹的康复运动,实现多轨迹的康复运动。
技术特征:
1.一种基于四杆式的上肢康复机器人器,其特征在于:所述上肢康复机器人由工作面(100)、电机驱动组件(200)、连杆组件(300)、滑动组件(400)和手柄组件(500)组成;所述工作平面(100)和电机驱动组件(200)通过紧定螺钉实现紧固连接;所述连杆组件(300)与电机驱动组件(200)通过螺钉紧固连接;所述滑动组件(400)与工作平面(100)通过螺钉实现紧固连接;所述手柄组件(500)与连杆组件(300)通过螺钉紧固连接。
2.根据权利要求1所述的一种基于四杆式的上肢康复机器人,其特征在于:所述工作平面(100)由所述电木板(101)、型材(102)和角铁(103)组成;所述电木板(101)与型材(102)通过螺钉紧固连接;所述角铁(103)与型材(102)通过t型螺钉进行紧固连接。
3.根据权利要求1所述的一种基于四杆式的上肢康复机器人器,其特征在于:所述电机驱动组件(200)由电机轴块(201)、轴承(202)、轴承板(203)、驱动轴(204)、联轴器(205)、电机固定板(206)和电机(207);所述电机轴块(201)与驱动轴(204)通过螺钉紧固连接;所述驱动轴(204)阶梯轴段卡在轴承(202)上,与所述联轴器(205)通过紧固摩擦来达到配合;所述轴承(202)与轴承板(203)通过螺钉紧固连接;所述轴承板(203)与型材(102)通过t型螺钉紧固连接;所述电机(207)与电机固定板(206)通过螺钉紧固连接,与联轴器(205)通过摩擦紧固连接;所述电机固定板(206)与型材(102)通过t型螺钉紧固连接。
4.根据权利要求1所述的一种基于四杆式的上肢康复机器人器,其特征在于:所述连杆组件(300),由杆1(301)、下轴块1(302)、轴承(302-1)、底板(302-2)、轴承底盖(302-3)、上轴块1(303)、杆2(304)、上轴块2(305)、轴承底盖(306-1)、底板(306-2)、轴承(306-3)、转轴块(306)、下轴块2(307)、密封板(308)和杆3(309)组成;所述杆1(301)与电机轴块(201)通过螺钉进行固定;所述下轴块1(302)与杆1(301)通过螺钉进行紧固连接;所述上轴块1(303)放入下轴块1(302)中,从下轴块1(302)下侧将轴承(302-1)套在上轴块1(303)上;所述底板(306-2)与上轴块1(303)通过螺钉紧固连接;所述轴承底盖(302-3)与下轴块1(302)通过螺钉紧固连接;所述杆2(304)与上轴块1(303)通过螺钉紧固连接;所述转轴块(306)与杆2(304)通过螺钉紧固连接;所述上轴块2(305)与转轴块(306)通过螺钉紧固连接;所述上轴块2(305)放入下轴块2(307)中,从下轴块2(307)下侧将轴承(306-3)套在上轴块2(305)上;所述底板(306-2)与上轴块2(305)通过螺钉紧固连接;所述轴承底盖(306-1)与下轴块2(307)通过螺钉紧固连接;所述密封板(308)与杆2(304)通过螺钉紧固连接;所述杆3(309)与下轴块2(307)通过螺钉紧固连接,与移动上轴块(401)通过螺钉紧固连接。
5.根据权利要求1所述的一种基于四杆式的上肢康复机器人器,其特征在于:所述滑动组件(400)可由移动上轴块(401)、移动轴(402)、轴承(403)、弹性挡圈(404)、滑轨板(405)、滑块(406)、滑道(407)和固定板(408)组成;所述移动上轴块(401)与移动轴(402)通过螺钉紧固连接;所述移动轴(402)与滑轨板(405)通过所述弹性挡圈(404)限制上下移动;所述轴承(403)与滑轨板(405)通过螺钉进行固定;所述滑块(406)与滑轨板(405)通过螺钉进行固定;所述滑道(407)与型材(102)通过所述固定板(408)和螺栓进行固定。
6.根据权利要求1所述的一种基于四杆式的上肢康复机器人器,其特征在于:所述手柄组件(500)由手柄外层(501)、手柄内轴(502)、弹性挡圈(503)、轴承(504)、支撑块(505)、万向球(506)和轴承挡板(507)组成;所述手柄外层(501)与所述轴承挡板(507)通过螺钉进行固定;所述手柄内轴(502)与所述支撑块(505)通过螺钉进行固定;所述弹性挡圈(503)卡在所述手柄内轴(502)阶梯轴凹槽处;所述轴承(504)套在手柄内轴(502)阶梯轴段;所述万向球(506)通过螺纹固定在支撑块(505)上。
技术总结
本发明为一种基于四杆式的上肢康复机器人,以解决当前传现有的平面训练器械如四杆结构,功能简单,形式单一,仅满足固定轨迹的运动,使患者对康复运动失去兴趣,为满足早期患者的康复需求,设计一款具备轨迹可变的平面康复训练机器人十分必要,本设计利用滑动组件中的滑块的移动来改变机架杆的长度,进而使手柄处的运动轨迹发生改变,利用这种原理使患者进行不同轨迹的康复运动,实现多轨迹的康复运动,与传统的单一的上肢康复结构相比较,显著提高了运动的多样性,使患者上肢各部位得到充分的训练,减少了康复训练医生的工作量压,提高康复效率,具有广泛的应用前景。
技术研发人员:倪鹏,孙建伟,杨慧香,崔明杰,姜大伟,丁健生,张超,董贤达,戴佳晟,赵占营,林铂,毕鹏
受保护的技术使用者:长春工业大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!