一种控制舵盘机构及医疗推车的制作方法
1.本技术涉及医疗器械技术领域,具体而言涉及一种控制舵盘机构及医疗推车。
背景技术:
2.外科手术机器人系统具有减小创口,提高手术成功率等显著优点,广泛应用于各类腹腔手术、前列腺手术、妇科手术等。外科医生可以远离手术台操纵机器进行手术,在具有更大视野的同时,可以让手术的施展更加灵活,通过系统消除人为抖动,使手术更加稳定。对外科手术机器人系统的研究也在近年来成为医疗器械应用的新领域。
3.外科手术机器人系统主要由患旁机器人、医生操纵台、视觉推车等三部分组成。外科手术中,作为手术直接执行机构的患旁机器人,一般具有较大的质量和体积,在进行手术的前后,需要通过人工操作控制舵盘,来驱动患旁机器人,完成移动和定位等功能。
4.以常见的舵盘为例,其舵盘的操控方式类似于汽车方向盘,操控舵盘以舵盘立柱为旋转中心进行旋转,通过一系列传动装置使推车的前轮发生转向,以此控制推车的转向运动。通过握住把手进行旋转来控制油门的大小,旋转方向的不同则对应前进或后退的驱动力。推车的转向轮一般为前轮,舵盘布置在推车的最后方,进行操作时,人也是处于推车的最后方,同时进行操作舵盘的转向和拧紧油门较为不便,尤其使使推车后退的操作,需要对操作人进行一定的培训才能满足操作要求。
技术实现要素:
5.在发明内容部分中引入了一系列简化形式的概念,这将在具体实施方式部分中进一步详细说明。本发明的发明内容部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
6.为解决以上技术问题,本技术设计了一种控制舵盘机构,是采用如下方案实现的:
7.一种控制舵盘机构,包括:
8.舵盘基座;
9.第一拉压力传感器,所述第一拉压力传感器固定安装于所述舵盘基座上,所述第一传感器感应的拉压力方向为第一方向;
10.转接部,与所述第一拉压力传感器直接或间接的弹性连接,并在所述舵盘基座上沿第一方向移动;
11.把手部,所述把手部可随第一活动部沿第一方向移动,所述把手部还相对于所述第一活动部可沿第二方向移动,所述第二方向在水平面内的投影与所述第一方向在水平面内的投影垂直;
12.第二拉压力传感器,所述第二拉压力传感器与所述第一活动部相对固定设置,所述把手部与所述第二拉压力传感器直接或间接的弹性连接,所述第二拉压力传感器检测所述把手部在第二方向上的拉压力。
13.本技术采用通过布置在舵盘上的两组拉压力传感器,获取操作者对舵盘的操作意
向,通过对力的分解,将力的方向大小分别由两组拉压力传感器进行收集,在操作时直接感受人的行进动作,进而驱动轮进行运动,即可直观有效地对患旁机器人进行灵活的移动。同时,第一拉压力传感器与第一活动部弹性连接,第二拉压力传感器与第二活动部弹性连接,避免当施加在舵盘上的力过大时使传感器超限造成损坏,大大提高了舵盘使用的可靠性和寿命。
附图说明
14.本技术的下列附图在此作为本技术的一部分用于理解本技术。附图中示出了本技术的实施例及其描述,用来解释本技术的原理。
15.附图中:
16.图1本技术实施例中患旁机器人结构示意图
17.图2本技术实施例中控制舵盘机构的结构示意图
18.图3本技术实施例中控制舵盘机构的分解结构示意图
19.附图标记说明:
20.100控制舵盘机构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
110舵盘底座
21.111销柱
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
120把手组件
22.121左把手部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
122右把手部
23.1221把手主体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1222把手胶套
24.130第一传感器组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
131第一拉压力传感器
25.132第一传感器安装座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
133第一保护弹簧
26.140第一导向组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
141滑轨
27.142滑块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
150连接组件
28.151第一连接件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1511孔
29.152第二连接件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1521内部空间
30.1522止挡部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1523挡圈
31.1524键构件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
160第二传感器组件
32.161第二拉压力传感器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
162第二传感器安装座
33.163第二保护弹簧
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
164第三连接件
34.171滚珠花键轴
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
172滚珠花键套筒
35.180开关组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
181微动开关
36.182按键基座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
183按键
37.200主动轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
300随动轮
具体实施方式
38.在下文的描述中,给出了大量具体的细节以便提供对本发明更为彻底的理解。然而,对于本领域技术人员来说显而易见的是,本发明实施方式可以无需一个或多个这些细节而得以实施。在其他的例子中,为了避免与本发明实施方式发生混淆,对于本领域公知的一些技术特征未进行描述。
39.为了彻底了解本发明实施方式,将在下列的描述中提出详细的结构。显然,本发明
实施方式的施行并不限定于本领域的技术人员所熟习的特殊细节。需要说明的是,本发明中所引用的诸如“第一”和“第二”的序数词仅仅是标识,而不具有任何其他含义,例如特定的顺序等。而且,例如,术语“第一部件”其本身不暗示“第二部件”的存在,术语“第二部件”本身不暗示“第一部件”的存在。本发明中所使用的术语“上”、“下”、“前”、“后”、“左”、“右”以及类似的表述只是为了说明的目的,并非限制。
40.如图1,是本技术实施例中控制舵盘机构应用场景。图1中,是一种医疗推车,医疗推车的移动机构包括两组相互独立的主动轮200和两组独立的随动轮300。其中,主动轮为电动驱动轮,由电力驱动,随动轮无动力提供其运动。控制舵盘机构100负责收集由操作者传递的运动趋势信号,从而控制两组独立的主动轮的运动速度和方向,实现机器人的前进、后退以及转向。
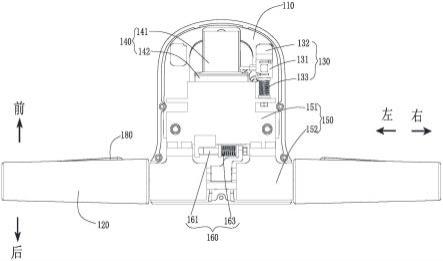
41.如图2,是本技术的控制舵盘机构100的实施例。
42.该控制舵盘机构100,包括舵盘底座110,把手组件120,第一传感器组件130,第一导向组件140,连接组件150,第二传感器组件160和第二导向组件。
43.其中舵盘底座110,固定安装在医疗推车的舵盘立柱400上。舵盘底座110的安装方式,可以将舵盘底座110放平,也即舵盘底座110的底面与水平面平行,也可以将舵盘底座110的底面与水平面呈一定的夹角。
44.舵盘底座110,具有安装区域,可以将第一传感器组件130、第二传感器组件140等安装于该安装区域内。
45.把手组件120,用于操作这将双手分别至于其上,对医疗推车进行推拉转向等动作。把手组件120主要包括左把手部121和右把手部122,分别用于将左手和右手把握或掌握,在使用时,使用者左手把握左把手部,右手把握右把手部进行推车。把手部可以是横向把,也可以是带有弧形的推杆或圆形方向盘结构。
46.在一些情况下,把手把手组件的把手部可以不分左右把握部,仅仅是单一把握区域,使用者可以同时双手使用,也可以单手把握推车。
47.第一传感器组件130,包括第一拉压力传感器131,第一传感器安装座132和第一保护弹簧133。第一传感器安装座132固定安装于舵盘底座110上,在一些实施例中,第一传感器安装座132与舵盘底座110一体成型或传感器安装座是舵盘底座本体的一部分,第一拉压力传感器的一端固定安装于第一传感器安装座上。在实施例中,第一拉压力传感器131的一端与传感器安装座132通过螺钉固定,第一拉压力传感器131的另一端与第一保护弹簧133通过螺钉固定,第一保护弹簧133一方面能够将拉力或压力传递至第一拉压力传感器131,另一方面第一保护弹簧133产生形变,受到拉伸或挤压行程有限,第一保护弹簧可以将对第一拉压力传感器产生的力限制在一定范围内,使之不超过第一传感器的最大行程保护,第一拉压力传感器131不因力度过大而损坏。
48.实施例中,第一拉压力传感131器的设置,其在视觉上,一端朝向医疗推车的前方,另一端朝向医疗推车的后方。第一拉压力传感器131,可采用s型拉压力传感器,柱型拉压力传感器,u型拉压力传感器等,以本领域技术人员能通过本技术实施例的启发可采用的任何型号的传感器均可。实施例中,第一传感器组件或第一拉压力传感器可以设置为一个,两个或多个,本领域人员通过本技术实施例的启发可采用的任意组合方式均可。
49.第一导向组件140,包括一个相对于舵盘底座固定设置的第一固定件,以及相对于
第一固定件限定在一个直线方向(例如为患旁机器人的前后方向)移动的第一活动件。
50.在一个实施例中,第一导向组件采用了滑轨141和滑块142。滑轨141固定安装于舵盘底座110上,滑块142安装在滑轨141上,能够在滑轨141上沿着滑轨141的方向移动。实施例中,滑轨的长度方向,也即滑块的滑动方向,在医疗推车的前后方向,也即与第一拉压力传感器的拉压力感测方向平行。在一些实施例中,第一导向组件不限于滑轨和滑块的形式,也可以采用其他可以导向的组件。
51.连接组件150,包括第一连接件151和第二连接件152。其中,第一连接件151为块状构件,与滑块142通过若干个螺钉固定。第一保护弹簧133的另一端即与第一连接件151螺栓连接。第一连接件151可以随滑块一起移动,第一连接件151的移动带动第一保护弹簧133与其连接的一端移动,可以对第一保护弹簧133产生拉力或压力,进而给第一拉压力传感器131传递拉力或压力。
52.第二连接件152,用于安装把手组件120。在实施例中,第二连接件152与第一连接件固151定连接,在一些实施例中,第二连接件与第一连接件可以是一体成型。
53.在上述实施例中,连接组件150的第一连接件151和第二连接件152共同组成转接部,将把手组件、第二拉压力传感器组件能够相对于舵盘基座活动的安装于舵盘上,并与第一保护弹簧产生联动,由第一拉压力传感器感知把手组件在设备的前后移动方向的力。
54.进一步,还可以设置用于第一连接件限位的器件。在一些实施例中,可以在舵盘底座安装销柱111,或舵盘底座一体成型有凸出构件,同时在第一连接件151上开设有孔1511,孔1511径大于销柱111的直径,第一连接件111前后移动,销柱111分别抵接孔1511的后端或前端,限制了第一连接件向前后移动的行程,同时保证第一保护弹簧的拉伸或压缩在一定范围内。在一些实施例中,不局限于将销柱安装在舵盘底座上,也可以将销柱与第一连接件固定连接,同时在舵盘底座上开设用于销柱移动的空间,同时对销柱限位。
55.在一些实施例中,限位器件不局限于限位第一连接件,也可以设置为限位滑块或第二连接件。
56.第二传感器组件160,包括第二拉压力传感器161、第二传感器安装座162和第二保护弹簧163。在一些实施例中,第二传感器安装座162可以是第一连接件151的一部分,在一些实施例中,第二传感器安装座162与第一连接件151是两个构件,并通过螺钉固定连接。第二拉压力传感器161的一端与第二传感器安装座162固定连接,第二拉压力传感器161的另一端与第二保护弹簧162通过螺栓固定。第二保护弹簧162的作用与第一保护弹簧的作用相同。第二拉压力传感器161与第二保护弹簧162的设置,在视觉上,是沿医疗推车的左右方向,也即与第一拉压力传感器131感知力的方向在舵盘基座的平面内垂直,同时第二拉压力传感器161感知力的方向与第一拉压力传感器131感知力的方向在水平面内的投影也垂直。在实施例中,第二传感器组件或第二拉压力传感器可以设置为一个,两个或多个,本领域人员通过本技术实施例的启发可采用的任意组合方式均可。
57.第二导向组件,包括一个相对于第一连接件固定设置的第二固定件,以及相对于第二固定件限定在一个直线方向(例如为患旁机器人的左右方向)移动的第二活动件。其中,第二固定件可以是与第一连接件固定连接,也可以是与第二连接件固定连接。
58.在一个实施例中,第二导向组件采用了滚珠花键轴171和滚珠花键套筒172。其中,滚珠花键套筒172与第二连接件152固定连接。具体的,第二连接件152设置为筒状构件,其
开设有用于容纳滚珠花键套筒的内部空间1521,滚珠花键套筒安装于连接件的内部空间内,并通过键连接,将滚珠花键套筒和第二连接件径向固定。滚珠花键套筒在第二连接件152的内部空间1521内,一端通过第二连接件一体形成的止挡部1522限制,另一端通过与第二连接件固定的挡圈1523止挡。滚珠花键套筒172与第二连接件152通过键构件1524固定,使得滚珠花键套筒172能够与第二连接件152以及第一连接件共同移动。
59.滚珠花键轴171,与两个滚珠花键套筒172安装于一起,使得滚珠花键轴与滚珠花键套筒之间可以沿滚珠花键轴长度方向相对移动。滚珠花键轴的长度方向,是视觉上沿医疗推车的左右方向,滚珠花键轴与滚珠花键套筒之间的相对移动的方向沿医疗推车的左右方向。滚珠花键轴171的一端与左把手部121固定通过螺钉固定连接,滚珠花键轴171的另一端与右把手部122通过螺钉固定,滚珠花键轴171将左把手部121和右把手部122固定连接。
60.其中,第二传感器组件与第二导向组件的连接,是通过第二保护弹簧162的另一端与滚珠花键轴171相对固定的设置。在一个实施例,在滚珠花键轴171与第二保护弹簧162之间连接有第三连接件164。第三连接件164的一端与滚珠花键轴171通过螺钉固定,第三连接件164的另一端与第二保护弹簧162螺栓固定,使得左把手部121和右把手部122移沿滚珠花键轴的长度方向移动时,对第二保护弹簧162产生拉力或压力,第二保护弹簧162进而将拉力或压力传递至第二拉压力传感器161。由于舵盘机构内部空间狭小,弹簧座的设置,可根据实际空间调整形状。
61.在实施例中,也可以设置用于把手移动的限位结构。具体的,设置第二连接件1521与把手主体大致同轴,滚珠花键套筒172位于第二连接件152的内部空间1521内,把手与第二连接件152之间具有一定的间隙,其中一个第二连接件的止挡部向内可以固定滚珠花键套筒,向外可以止挡左把手主体,相应的,另一个第二连接件的挡圈123,向内可以固定滚珠花键套筒,向外可以止档右把手主体。把手与第二连接件之间具有间隙,可以供留把手和滚珠花键移动的空间,当左把手或右把手与第二连接件抵接时,第二连接件对把手限位。
62.在一些实施例中,第二导向组件不局限于用滚珠花键轴和滚珠花键套筒的组合,也可以采用其他直线轴承组件,或直线导向组件如滑轨滑块组件来实现与上述实施例相同的功能。
63.上述实施例中,采取了第一拉压力传感器组件和第二拉压力传感器组件,对把手组件施加不同方向、不同大小的力时,均将会分解成相应的沿设备前后和左右方向的力,来获取施加在舵盘上的推力、拉力、侧向力,并将其转化为电信号,来驱动患旁机器人实现便捷的前进、后退、转向动作,通过对力信号的收集,并控制主动轮运动,使舵盘的操控更加直观有效,患旁机器人的移动变得更加灵活。另外,通过设计机械限位,避免当施加在舵盘上的力过大时使传感器超限造成损坏,大大提高了舵盘使用的可靠性和寿命。
64.该舵盘控制机构,进一步还设置有开关组件180。开关组件180,包括微动开关181,按键基座182和按键183。微动开关181固定设置于按键基座112上,按键183作用于微动开关181。具体的,把手组件的右把手部122包括把手主体1221和把手胶套1222,把手主体1221开设有一个腔体,微动开关181和把手按键基座182置于腔体内,按键基座182与把手主体固定,按键183的一端与把手主体枢接,并与微动开关的弹性器件184连接。按键183的另一端与的弹性器件184连接。把手胶套将把手主体、按键基座和微动开关隐藏于其中。其中,微动开关可以采用超小型微动开关。
65.在实施例中,开关组件可以设置为两组,在左把手部和右把手部均设置微动开关。在实施例中,微动开关能够起到打开主动轮的电动状态,设置两组微动开关可以起到双重保护。
66.在上述实施例中,在患旁机器人的运动操控过程中,当想要前进时,双手握紧把手,同时按压微动开关,向把手组件施加向前的推力,微动开关输入释放驱动轮刹车信号,第一传感器组件的第一保护弹簧压缩,对第一拉压力传感器产生压力,第一拉压力传感器将感知到的前进力的信号输入,系统控制主动轮向前。同理,当想要后退时,对把手组件施加向后的拉力。当设备需要转向时,滚珠花键轴和滚珠花键外筒只能左直线运动而不能左旋转运动,限制了把手组件和滚珠花键轴只会在滚珠花键轴的左右方向上产生微移动,第二拉压力传感器感知到转向的信号输入。同时,由于第二保护弹簧的限制,把手组件的行程有限,第二保护弹簧收到的挤压或拉伸量越大,所产生的压力或拉力也越大,通过第二传感器检测出把手移动的位移大小,来判断转向的趋势和程度,实现转向的需求。
67.上述控制舵盘机构,不只适用于患旁机器人,也可以适用于任意的医疗推车。
68.除非另有定义,本文中所使用的技术和科学术语与本发明的技术领域的技术人员通常理解的含义相同。本文中使用的术语只是为了描述具体的实施目的,不是旨在限制本发明。本文中出现的诸如“设置”等术语既可以表示一个部件直接附接至另一个部件,也可以表示一个部件通过中间件附接至另一个部件。本文中在一个实施方式中描述的特征可以单独地或与其它特征结合地应用于另一个实施方式,除非该特征在该另一个实施方式中不适用或是另有说明。
69.本发明已经通过上述实施方式进行了说明,但应当理解的是,上述实施方式只是用于举例和说明的目的,而非意在将本发明限制于所描述的实施方式范围内。本领域技术人员可以理解的是,根据本发明的教导还可以做出更多种的变型和修改,这些变型和修改均落在本发明所要求保护的范围以内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1