一种上肢智能康复训练系统信号采集装置的制作方法
1.本实用新型涉及一种上肢智能康复训练系统信号采集装置,属于信号处理技术领域。
背景技术:
2.目前,我国人口老龄化程度加重,肢体不健康患者日益增多,因而肢体康复辅助器具已然成为康复领域的研究热点,国内外研究团队设计的各类康复机器人也已投入到实际使用中。
3.现有的上肢智能康复训练系统包括应变采集装置、控制器和关节电机,应变采集装置包括应变传感器,应变传感器将采集的应变数据传输至控制器,进而控制器可以分析出患者的训练情况,得到关节电机的控制量以控制关节电机运动。然而整个上肢智能康复训练系统的控制核心——控制器,也就是大脑,所接收的信号的数字的,需进入控制器的信号为数字的才可进行运算处理,由于应变传感器所输出的信号是微弱的混有干扰信号的模拟量,因此,需要对应变传感器所采集的信号进行处理后进行ad转换,以提高数据采集的准确性。
4.现有的信号采集装置包括在应变传感器和控制器之间依次设置的差分放大电路、隔离电路、后置放大电路、以及a/d转换电路,差分放大电路接收应变传感器输出的模拟量,将模拟量进行预放大处理;隔离电路用于将预放大处理后的模拟量进行隔离,防干扰处理;后置放大电路用于将隔离后的信号进行阻抗匹配;a/d转换电路用于将将阻抗匹配后的信号进行模/数转换,并将数字量输入控制器中,完成应变信号的采集。
5.然而上智康复训练系统中的信号采集是在机械臂运行过程中采集的,当机械臂加速运动或者减速运动的时候,应变传感器采集到的力已经是叠加了运动影响的力,如果所采集到的力不准确,将会导致输出控制关节电机的控制量会有相应的偏差,导致上肢康复训练系统的控制准确性降低。
技术实现要素:
6.本技术的目的在于提供一种上肢智能康复训练系统信号采集装置,用以解决现有信号采集装置采集的应力信号不准而导致上智康复训练系统控制准确性低的问题。
7.为实现上述目的,本技术提出了一种上肢智能康复训练系统信号采集装置的技术方案,包括应变传感器和模/数转换电路,还包括加速度传感器和减法运算电路,加速度传感器用于采集机械臂运动过程中产生的加速度信号的模拟量,应变传感器连接减法运算电路的同相输入端,加速度传感器连接减法运算电路的反相输入端,减法运算电路的输出端连接模/数转换电路的输入端,模/数转换电路的输出端用于连接控制器的输入端;所述减法运算电路用于将应力信号中的基于加速度信号产生的干扰力进行消除,模/数转换电路用于将消除干扰力的应力信号进行模/数转换,并将转换后的数字量输入控制器中。
8.本实用新型的上肢智能康复训练系统信号采集装置的技术方案的有益效果是:本
实用新型通过加速度传感器采集机械臂运动过程中产生的加速度,并且通过减法运算电路将应力信号中的加速度信号产生的干扰力进行消除,提高了应力信号采集的准确性,进而产生更加准确的关节电机的控制力,提高了上肢康复训练系统控制的准确性。
9.进一步地,为了提高信号处理的准确性,还包括差分放大电路,差分放大电路的输入端连接应变传感器的输出端,差分放大电路的输出端连接减法运算电路的的同相输入端,差分放大电路用于接收应变传感器输出的应力信号的模拟量,将应力信号的模拟量进行放大处理。
10.进一步地,为了保证信号放大的可靠性,所述差分放大电路包括芯片ina128u,芯片ina128u的输入端连接应变传感器,芯片ina128u的输出端连接减法运算电路的同相输入端。
11.进一步地,为了减小应力信号中的干扰信号,芯片ina128u的负输入端设置有滤波电路,滤波电路包括并联的电阻和电容。
12.进一步地,为了提高信号采集的准确性,所述应变传感器为三维应变传感器,用于采集x轴、y轴、z轴的应力信号,所述加速度传感器为三维加速度传感器,用于采集x轴、y轴、z轴的加速度信号;差分放大电路包括第一差分放大电路、第二差分放大电路和第三差分放大电路;减法运算电路包括第一减法运算电路、第二减法运算电路和第三减法运算电路;第一差分放大电路的输入端连接应变传感器的x轴信号输出端,第一差分放大电路的输出端连接第一减法运算电路的同相输入端,第一减法运算电路的反相输入端连接三维加速度传感器的x轴信号输出端,第一减法运算电路的输出端连接模/数转换电路的输入端;第二差分放大电路的输入端连接应变传感器的y轴信号输出端,第二差分放大电路的输出端连接第二减法运算电路的同相输入端,第二减法运算电路的反相输入端连接三维加速度传感器的y轴信号输出端,第二减法运算电路的输出端连接模/数转换电路的输入端;第三差分放大电路的输入端连接应变传感器的z轴信号输出端,第三差分放大电路的输出端连接第三减法运算电路的同相输入端,第三减法运算电路的反相输入端连接三维加速度传感器的z轴信号输出端,第三减法运算电路的输出端连接模/数转换电路的输入端。
13.进一步地,为了提高加速度采集的准确性,三维加速度传感器包括芯片mma7260。
14.进一步地,为了便于加速度传感器的安装,加速度传感器设置在机械臂的手部机构上。
15.进一步地,为了提高减法运算的准确性,所述减法运算电路包括芯片ina128u,芯片ina128u的反相输入端和输出端之间设置有反馈电阻,并且芯片ina128u的反相输入端与加速度传感器之间设置有第一电阻,反馈电阻的阻值与第一电阻的阻值的阻值比等于机械臂的质量。
16.进一步地,还包括隔离电路,隔离电路的输入端连接减法运算电路的输出端,隔离电路的输出端连接模/数转换电路的输入端,隔离电路用于对减法运算电路输出的信号进行防干扰处理。
17.进一步地,所述隔离电路包括芯片iso124p。
附图说明
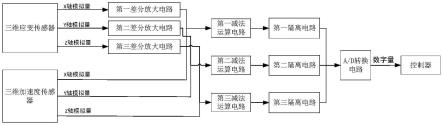
18.图1是本实用新型上肢智能康复训练系统信号采集装置的结构框图;
19.图2是本实用新型三维加速度传感器的电路原理图;
20.图3是本实用新型差分放大电路的电路原理图;
21.图4是本实用新型减法运算电路的电路原理图;
22.图5是本实用新型隔离电路的电路原理图。
具体实施方式
23.上肢智能康复训练系统信号采集装置实施例:
24.上肢智能康复训练系统信号采集装置如图1所示,包括三维应变传感器、三维加速度传感器、第一差分放大电路、第二差分放大电路、第三差分放大电路、第一减法运算电路、第二减法运算电路、第三减法运算电路、第一隔离电路、第二隔离电路、第三隔离电路和a/d转换电路(即模/数转换电路)。
25.上述各电路的连接关系为:
26.第一差分放大电路的输入端连接应变传感器的x轴信号输出端,第一差分放大电路的输出端连接第一减法运算电路的同相输入端,第一减法运算电路的反相输入端连接三维加速度传感器的x轴信号输出端,第一减法运算电路的输出端连接第一隔离电路的输入端,第一隔离电路的输出端连接a/d转换电路的输入端;a/d转换电路的输出端连接控制器;
27.第二差分放大电路的输入端连接应变传感器的y轴信号输出端,第二差分放大电路的输出端连接第二减法运算电路的同相输入端,第二减法运算电路的反相输入端连接三维加速度传感器的y轴信号输出端,第二减法运算电路的输出端连接第二隔离电路的输入端,第二隔离电路的输出端连接a/d转换电路的输入端;
28.第三差分放大电路的输入端连接应变传感器的z轴信号输出端,第三差分放大电路的输出端连接第三减法运算电路的同相输入端,第三减法运算电路的反相输入端连接三维加速度传感器的z轴信号输出端,第三减法运算电路的输出端连接第三隔离电路的输入端,第三隔离电路的输出端连接a/d转换电路的输入端。
29.其中,三维应变传感器和三维加速度传感器均设置在机械臂的手部机构上(也即机械臂的末端),三维应传感器用于采集机械臂上x轴、y轴、z轴的应力信号,三维加速度传感器用于机械臂上采集x轴、y轴、z轴的加速度信号,三维加速度传感器如图2所示包括芯片mma7260,该三维加速度传感器输出为x、y、z三个方向的加速度电压值,通过调节g1和g2端可以调节加速度的量程,en为使能端,使能端和3.3v通过短路连接进行使能,power+端加上5v电压,power-端接地。三维加速度传感器通过x轴信号输出端输出信号“加速度x”(也即图2中的vo2),通过y轴信号输出端输出信号“加速度y”,通过z轴信号输出端输出信号“加速度z”,各信号都是作为下一级减法运算电路的反相输入。
30.各差分放大电路用于接收应变传感器输出的对应的应力信号的模拟量,将对应的应力信号的模拟量进行放大处理,如图3所示,图3以第一差分放大电路为例对差分放大电路和应变传感器的连接关系进行说明,第一差分放大电路包括芯片ina128u,芯片ina128u的正输入端in+和负输入端in-连接应变传感器的x轴信号输出端(x+和x-);并且芯片ina128u的正输入端in+通过电阻r2和电阻r4连接x+,负输入端in-通过一个电阻r1和滤波电路连接x-;滤波电路由并联的电阻r3和电容c1组成,芯片ina128u的输出端out输出信号vo1;芯片ina128u的的电源端v连接-5v电源;芯片ina128进行传感器输出信号放大,通过调
整外部电阻rg的大小来调整放大倍数,可实现1到10000倍数的放大。同理第二差分放大电路和第三差分放大电路与第一差分放大电路的结构基本相同,不同之处在于输入端连接的是应变传感器的y轴信号输出端和z轴信号输出端,这里不做赘述。
31.各减法运算电路用于将对应的应力信号中的基于加速度信号产生的干扰力进行消除,如图4所示,图4以第一减法运算电路为例对减法运算电路进行说明,第一减法运算电路包括包括芯片ina128u,芯片ina128u的同相输入端in+通过电阻r17连接信号vo1,芯片ina128u的反相输入端in-通过第一电阻r15连接信号vo2,芯片ina128u的输出端out输出信号vo3,芯片ina128u的反相输入端和输出端之间设置有反馈电阻r16,减法运算电路的运算公式为vo1-mvo2,m为机械臂的质量,这里机械臂的质量为24kg,通过设置反馈电阻r16和第一电阻r15的阻值比例确定出运算公式,反馈电阻r16的阻值与第一电阻r15的阻值的阻值比等于机械臂的质量,也即r16=24*r15。关于第二减法运算电路和第三减法运算电路的结构与第一减法运算电路的结构基本相同,这里不做赘述。
32.各隔离电路用于对对应的减法运算电路输出的信号进行防干扰处理,如图5所示,图5以第一隔离电路为例对隔离电路进行说明,第一隔离电路包括芯片iso124p,芯片iso124p的输入端用于接收信号vo3,芯片iso124p的输出端输出隔离后的信号vo4。关于第二隔离电路和第三隔离电路的电路与第一隔离电路相同,这里不做赘述。
33.a/d转换电路用于接收第一隔离电路输出的信号vo4、第二隔离电路输出的信号以及第三隔离电路输出的信号,将各信号中消除干扰力的应力信号进行模/数转换,并将转换后的数字量输入控制器中。
34.关于差分放大电路、隔离电路、减法运算电路、以及a/d转换电路的具体形式本实用新型并不做限制,可以采用现有技术中具有相同功能的其他电路。
35.上述实施例中,为了提高信号处理的准确性,应变传感器输出的应力信号通过差分放大电路进行放大,并且在差分放大电路的福输入端设置有滤波电路,作为其他实施方式,在保证信号处理准确性的情况下,差分放大电路和滤波电路可以不设置。
36.上述实施例中,为了对减法运算电路输出的信号做防干扰处理,在每个减法运算电路的输出端设置有隔离电路,作为其他实施方式,在保证无干扰的情况下,隔离电路也可以不设置。
37.上述实施例中,为了便于加速度传感器和应变传感器的安装,将加速度传感器和应变传感器设置在机械臂的末端,作为其他实施方式,也可以将加速度传感器和应变传感器设置在大臂或者小臂等易于安装的地方。
38.上述实施例中,基于加速度传感器和应变传感器均为三维传感器的设置,差分放电电路、减法运算电路、以及隔离电路均采用三路,分别对x轴、y轴、z轴的应力信号进行干扰力消除,作为其他实施方式,也可以采用一维加速度传感器和应变传感器、或者多维加速度传感器和应变传感器,只要设置相应数量的差分放大电路、隔离电路、减法运算电路即可,本实用新型对此不做限制。
39.本实用新型的信号采集装置增加了加速度传感器和减法运算电路,消除了机械臂加速运动带来的干扰力,提高了应力采集的准确性,进而提高了上肢康复训练系统控制的准确性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1