一种检测毛细血管再充盈时间的智能传感装置
1.本实用新型涉及一种用于自动检测毛细血管再充盈时间的传感装置。
背景技术:
2.循环衰竭是重症患者,尤其是创伤、严重感染、外科大手术患者,常常面临的风险。而循环衰竭又会累及其他脏器,导致多器官功能衰竭,极大地增加病死风险。循环衰竭是一个不断演变的过程,如果能在早期对循环灌注进行准确评估,就有可能发出预警,指导医护人员采取针对性的治疗干预措施,从而挽救生命。因此,对循环灌注状态的准确评估非常重要。
3.毛细血管再充盈时间(capillary refill time,crt)是通过按压指端后末梢恢复灌注的所需时间,已被证明为一实用、可靠的循环灌注评估指标。但目前还没有十分精确的办法来测量crt,测量crt的传统方法是通过载玻片压迫指腹直至变白,维持10s后松开,观察指尖恢复红润所需时间,3s内恢复红润视为正常。这种方法比较主观,测量结果一致性较差,并且测量过程由于受到主观因素影响,从而导致测量结果的变化或偏差。2019年,jacquet-lagr
è
ze改进了crt的测量方法,通过封闭注射器出口,并将注射器从10ml压缩至7ml,实现2.5cm2的接触面上176mmhg的固定按压压强来定量地按压指腹。但是该方法仍然依赖人工按压和计时,不同观察者之间一致性较差,亦难以适应临床连续监测的需求。
4.综上所述,已有的crt临床测量方法均为人工测量。人工测量方式会因为每次按压的力度、每次人眼观察的误差、每次外界光线的变化,导致对于颜色观察的偏差等,进而导致会产生许多不精确的测量结果。
技术实现要素:
5.本实用新型要解决的技术问题是:目前毛细血管再充盈时间的测量均采用人工方式实现。
6.为了解决上述技术问题,本实用新型的技术方案是提供了一种检测毛细血管再充盈时间的智能传感装置,其特征在于,包括由单片机控制的驱动机构,机械夹持机构的末端与驱动机构相联结,由驱动机构驱动机械夹持机构的打开及闭合,机械夹持机构的前端嵌合有传感器模块,传感器模块与单片机的信号采集端相连,单片机的采集信号输出端口与pc相连,其中:
7.传感器模块包括电阻式薄膜压力传感器以及用于采集ppg信号的生物传感器;
8.机械夹持机构包括主动臂以及被动臂,驱动机构与主动臂的末端相联结,主动臂的前端有压力传感器安装板;压力传感器安装板具有用于压迫手指指尖的压迫平面一,该压迫平面一内嵌入有电阻式薄膜压力传感器;
9.被动臂的末端穿设有转轴,转轴固定在驱动机构上;主动臂通过齿轮传动机构带动被动臂绕转轴同步旋转;被动臂的前端有生物传感器安装板,生物传感器安装板上有安装卡块,生物传感器安装块背面的安装卡槽与安装卡块相配合,从而固定在生物传感器安
装板上;生物传感器安装块的正面为用于压迫手指指尖的压迫平面二,该压迫平面二内嵌入有生物传感器,生物传感器通过生物传感器安装块上的导电柱与pc相连。
10.优选的,所述驱动机构包括舵机以及设于舵机的顶面的底座,所述机械夹持机构的末端与舵机相联结,并置于底座上。
11.优选的,所述单片机还连接指纹识别模块。
12.优选的,所述齿轮传动机构包括形成于主动臂末端外圆周面的一圈主动齿以及形成于被动臂末端外圆周面的一圈被动齿,被动齿与主动齿相啮合。
13.本实用新型设计了一个机械装置,利用单片机对舵机驱动机械夹的方式对手指指尖进行压迫。并且本实用新型利用多种传感器来确保测量的精准以及对不同实验对象的适应。机械装置采集到的测量数据通过usb连接发送到电脑可以进行进一步地进行数据存储和处理。本实用新型采用传感+机械挤压的方法能很好地规避人工测量方式所带来的风险。本实用新型采用max系列传感芯片,使得crt测量问题转换成手指内部血液对光吸收状态的变化,进而规避crt测量的时间、人眼观察、环境光的影响。本实用新型在挤压装置上附加了薄膜传感芯片,使得本实用新型提供的机械装置每次施加的压力恒定,从而规避掉了人为按压力度的偏差。
附图说明
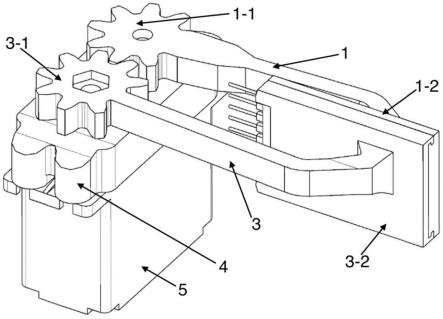
14.图1为本实用新型提供的一种检测毛细血管再充盈时间的智能传感装置的立体结构示意图;
15.图2为图1所示结构的爆炸图;
16.图3为本实用新型提供的一种检测毛细血管再充盈时间的智能传感装置的电路框图。
具体实施方式
17.下面结合具体实施例,进一步阐述本实用新型。应理解,这些实施例仅用于说明本实用新型而不用于限制本实用新型的范围。此外应理解,在阅读了本实用新型讲授的内容之后,本领域技术人员可以对本实用新型作各种改动或修改,这些等价形式同样落于本技术所附权利要求书所限定的范围。
18.如图1及图2所示,本实用新型提供的一种检测毛细血管再充盈时间的智能传感装置包括舵机5,本实施例中,舵机5的型号为mg 996r。舵机5驱动机械夹持机构对手指的指尖进行压迫。
19.为了便于固定机械夹持机构,在舵机5的顶面设置有底座4,机械夹持机构的末端与舵机5相联结,并置于底座4上。机械夹持机构的前端用于对手指的指尖进行压迫。机械夹持机构的前端嵌合有传感器模块,在机械夹持机构对手指的指尖进行压迫以及放开手指的过程中,由传感器模块进行测量,来保证所获得毛细血管再充盈时间的准确性。
20.传感器模块包括电阻式薄膜压力传感器以及生物传感器。电阻式薄膜压力传感器用于确保机械夹持机构以恒定的力实现对手指指尖的压迫,本实施例中,电阻式薄膜压力传感器所采用型号为fsr402。将施加在fsr402电阻式薄膜压力传感器区域的压力转换成电阻值的变化,从而获得压力信息。压力越大,电阻越低。将该电阻式薄膜压力传感器用于机
械夹持机构末端,用于检测是否接触到指尖,并在压迫过程中保证对指尖施加的压力恒定,来确保施加压力的恒定和时间测量的准确性。
21.生物传感器用于采集ppg(photo plethysmograph)信号,本实施例中,生物传感器所采用的型号为max30101。max30101是一个集成了脉搏血氧和心率监测功能的生物传感器模块,其本身集成了一个红光led和一个光电检测器,以及带环境光抑制的低噪声电子电路,内部采用了一个1.8v逻辑电源和一个独立的5.0v内部led电源。结合图3,生物传感器及电阻式薄膜压力传感器与stm32单片机的信号采集端相连,stm32单片机的控制信号输出端与舵机5相连,stm32单片机的采集信号输出端口与pc相连。生物传感器通过标准的i2c兼容通信接口将采集到的ppg信号传输给stm32单片机,再由stm32单片机将该ppg信号传输给pc,由pc基于ppg信号采用crt检测算法计算得到毛细血管再充盈时间。本实施例中,stm32单片机还连接指纹识别模块,本实施例中,指纹识别模块采用atk-301电容式半导体指纹识别模块,单片机通过指纹识别模块采集到当前用户的指纹后,将其传输至pc,由pc将指纹与同一用户的毛细血管再充盈时间关联存储,从而将不同用户的毛细血管再充盈时间进行分类以及存储。atk-301电容指纹识别模块(以下简称lb301模块)是alientek推出的一款高性能的电容半导体指纹识别模块。lb301模块采用了瑞典fpc公司按压式电容指纹传感器,该传感器具有功耗低、稳定、图像一致性效果好、耐静电等级高的特点。lb301模块搭配gigadevice(兆易创新)生产的指纹控制专用芯片,针对指纹传感器做出了大量的图像优化、速度优化、算法优化,使模块具有识别速度快,通过率高的等特点。相对传统光学指纹模块,lb301模块具有识别速度更快、体积更小、功耗更低等特点。将lb301模块与单片机相连接以实现录入指纹、验证指纹验证用户身份来存储信息等功能。
22.用户先在指纹识别模块通过单片机来进行身份认证或者录入指纹。再将指尖放在机械夹持机构的一端开始进行对指尖的压迫。压力传感器分别进行初次校准和压力控制的作用。max30101模块将此间采集到的ppg信号传送给pc进行存储并且进行进一步的分析,最终计算出所求的时间并进行保存。
23.机械夹持机构包括主动臂1以及被动臂3。舵机5的输出轴穿过底座4后与主动臂1的末端相联结,主动臂1的前端有压力传感器安装板1-2。压力传感器安装板1-2具有用于压迫手指指尖的压迫平面一,该压迫平面一内嵌入有电阻式薄膜压力传感器。
24.被动臂3的末端穿设有转轴,转轴固定在底座4上。主动臂1通过齿轮传动机构带动被动臂3绕转轴同步旋转。本实施例中,齿轮传动机构包括形成于主动臂1末端外圆周面的一圈主动齿1-1以及形成于被动臂3末端外圆周面的一圈被动齿3-1,被动齿3-1与主动齿1-1相啮合。被动臂3的前端有生物传感器安装板3-2,生物传感器安装板3-2上有安装卡块,生物传感器安装块2背面的安装卡槽与安装卡块相配合,从而固定在生物传感器安装板3-2上。生物传感器安装块2的正面为用于压迫手指指尖的压迫平面二,该压迫平面二内嵌入有生物传感器,生物传感器通过生物传感器安装块2上的导电柱与pc相连。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1