一种神经内科手部康复机器人手套的制作方法
1.本实用新型涉及神经内科疾病患者康复设备技术领域,具体为一种神经内科手部康复机器人手套。
背景技术:
2.康复机器人手套是一款针对中风等神经内科疾病患者手部运动功能康复的智能设备,具有主从康复、被动康复等多种功能。康复机器人手套主体采用与日常手套材质相似的布料,通过设备驱动模仿人体肌肉伸缩,常见的有气动伸缩驱动方式,可以分别带动每个手指实现弯曲和伸直的动作,完成抓握。
3.目前,市场上的康复机器人手套比较常见,使用也比较广泛,但是由于其气动伸缩驱动只设置在每个手指的背面,虽然能带动手指和手掌进行弯曲和伸直的动作,却不能实现像普通人的手一样,单个手指能够绕手掌与手指连接部位的关节左右摆动,其康复功能存在缺陷,故提出一种新型的神经内科手部康复机器人手套。
技术实现要素:
4.针对现有技术存在的不足,本实用新型提供了一种神经内科手部康复机器人手套,用于解决目前市场上的康复机器人手套不能实现单个手指绕手掌与手指连接部位的关节左右摆动来促进手部康复的问题。
5.为解决上述技术问题,本实用新型提供如下技术方案:
6.一种神经内科手部康复机器人手套,包括手套本体,所述手套本体上设置有沿着人体手指方向并延伸到人体手背中部对应位置的抓握气囊伸缩管,所述手套本体对应每个手指与手背连接位置处设置有与抓握气囊伸缩管平行的摇摆气囊伸缩管,所述抓握气囊伸缩管和摇摆气囊伸缩管均分别与多根连接软管相连。
7.优选的,所述手套本体包括与人体手背位置对应的手掌背片、设置在手掌背片上且套接在连接软管表面的软管固定片、设置在手掌背片前端与人体手指位置对应的手指背片、设置在手指背片上与人体手指的指腹对应的指套、设置在手掌背片两侧对应人体手腕位置的两个手套固定片以及设置在手套固定片上的固定组件。
8.优选的,所述指套至少覆盖人体手指前端的两节指骨,所述摇摆气囊伸缩管的前端至少延伸到人体手指前端的第二个关节位置处,且摇摆气囊伸缩管的后端至少延伸到人体手指前端的第三个关节后端。
9.优选的,所述固定组件为纽扣、按扣或魔术贴。
10.优选的,所述固定组件为橡皮带。
11.与现有技术相比,本实用新型具备以下有益效果:
12.本实用新型通过在手套本体上抓握气囊伸缩管的一侧且对应每个手指背片与手掌背片连接的部位分别设置摇摆气囊伸缩管,摇摆气囊伸缩管被充气和抽气便可带动手指背片对应指套内部的手指绕手掌与手指连接部位的关节左右摆动,完善了康复训练的动
作,模仿普通人手的活动,促进手部康复,达到功能提升、完善康复动作的效果,解决了目前市场上的康复机器人手套不能实现单个手指绕手掌与手指连接部位的关节左右摆动来促进手部康复的问题。
附图说明
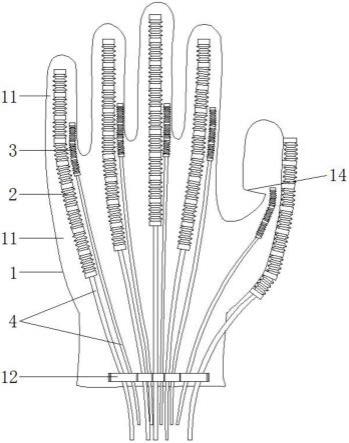
13.图1为本实用新型康复机器人手套手背一侧结构示意图;
14.图2为本实用新型康复机器人手套实施例一的手掌一侧结构示意图;
15.图3为本实用新型康复机器人手套实施例二的手掌一侧结构示意图。
16.图中:1、手套本体;11、手掌背片;12、软管固定片;13、手指背片;14、指套;15、手套固定片;16、固定组件;2、抓握气囊伸缩管;3、摇摆气囊伸缩管;4、连接软管。
具体实施方式
17.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
18.实施例一
19.如图1和图2所示,本实用新型提供一种技术方案:一种神经内科手部康复机器人手套,包括手套本体1,手套本体1上设置有沿着人体手指方向并延伸到人体手背中部对应位置的抓握气囊伸缩管2,手套本体1对应每个手指与手背连接位置处设置有与抓握气囊伸缩管2平行的摇摆气囊伸缩管3,抓握气囊伸缩管2和摇摆气囊伸缩管3均分别与多根连接软管4相连。
20.作为本实用新型的一种技术优化方案,手套本体1包括与人体手背位置对应的手掌背片11、设置在手掌背片11上且套接在连接软管4表面的软管固定片12、设置在手掌背片11前端与人体手指位置对应的手指背片13、设置在手指背片13上与人体手指的指腹对应的指套14、设置在手掌背片11两侧对应人体手腕位置的两个手套固定片15以及设置在手套固定片15上的固定组件16。
21.作为本实用新型的一种技术优化方案,指套14至少覆盖人体手指前端的两节指骨,摇摆气囊伸缩管3的前端至少延伸到人体手指前端的第二个关节位置处,且摇摆气囊伸缩管3的后端至少延伸到人体手指前端的第三个关节后端。
22.作为本实用新型的一种技术优化方案,固定组件16为纽扣、按扣或魔术贴,纽扣和按扣可以设置多组,魔术贴的粘贴面可以设置稍微宽一点,穿戴时可以根据手腕粗细不同自由选择两片手套固定片15的重合宽度来改变连接的松紧程度,设计比较人性化。
23.实施例二
24.如图1和图3所示,本实用新型提供一种技术方案:一种神经内科手部康复机器人手套,包括手套本体1,手套本体1上设置有沿着人体手指方向并延伸到人体手背中部对应位置的抓握气囊伸缩管2,手套本体1对应每个手指与手背连接位置处设置有与抓握气囊伸缩管2平行的摇摆气囊伸缩管3,抓握气囊伸缩管2和摇摆气囊伸缩管3均分别与多根连接软管4相连。
25.作为本实用新型的一种技术优化方案,手套本体1包括与人体手背位置对应的手掌背片11、设置在手掌背片11上且套接在连接软管4表面的软管固定片12、设置在手掌背片11前端与人体手指位置对应的手指背片13、设置在手指背片13上与人体手指的指腹对应的指套14、设置在手掌背片11两侧对应人体手腕位置的两个手套固定片15以及设置在手套固定片15上的固定组件16。
26.作为本实用新型的一种技术优化方案,指套14至少覆盖人体手指前端的两节指骨,摇摆气囊伸缩管3的前端至少延伸到人体手指前端的第二个关节位置处,且摇摆气囊伸缩管3的后端至少延伸到人体手指前端的第三个关节后端。
27.作为本实用新型的一种技术优化方案,固定组件16为橡皮带,穿戴时将手穿过手套固定片15,通过橡皮带自身的伸缩特性完成固定,使用比较方便。
28.需要说明的是,在本文中,诸如术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
29.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
技术特征:
1.一种神经内科手部康复机器人手套,包括手套本体(1),其特征在于:所述手套本体(1)上设置有沿着人体手指方向并延伸到人体手背中部对应位置的抓握气囊伸缩管(2),所述手套本体(1)对应每个手指与手背连接位置处设置有与抓握气囊伸缩管(2)平行的摇摆气囊伸缩管(3),所述抓握气囊伸缩管(2)和摇摆气囊伸缩管(3)均分别与多根连接软管(4)相连。2.根据权利要求1所述的一种神经内科手部康复机器人手套,其特征在于:所述手套本体(1)包括与人体手背位置对应的手掌背片(11)、设置在手掌背片(11)上且套接在连接软管(4)表面的软管固定片(12)、设置在手掌背片(11)前端与人体手指位置对应的手指背片(13)、设置在手指背片(13)上与人体手指的指腹对应的指套(14)、设置在手掌背片(11)两侧对应人体手腕位置的两个手套固定片(15)以及设置在手套固定片(15)上的固定组件(16)。3.根据权利要求2所述的一种神经内科手部康复机器人手套,其特征在于:所述指套(14)至少覆盖人体手指前端的两节指骨,所述摇摆气囊伸缩管(3)的前端至少延伸到人体手指前端的第二个关节位置处,且摇摆气囊伸缩管(3)的后端至少延伸到人体手指前端的第三个关节后端。4.根据权利要求2所述的一种神经内科手部康复机器人手套,其特征在于:所述固定组件(16)为纽扣、按扣或魔术贴。5.根据权利要求2所述的一种神经内科手部康复机器人手套,其特征在于:所述固定组件(16)为橡皮带。
技术总结
本实用新型公开了一种神经内科手部康复机器人手套,涉及神经内科疾病患者康复设备技术领域,该神经内科手部康复机器人手套,包括手套本体,所述手套本体上设置有沿着人体手指方向并延伸到人体手背中部对应位置的抓握气囊伸缩管,所述手套本体对应每个手指与手背连接位置处设置有与抓握气囊伸缩管平行的摇摆气囊伸缩管,所述抓握气囊伸缩管和摇摆气囊伸缩管均分别与多根连接软管相连。在手套本体上抓握气囊伸缩管的一侧且对应每个手指背片与手掌背片连接的部位分别设置摇摆气囊伸缩管,摇摆气囊伸缩管被充气和抽气便可带动手指背片对应指套内部的手指绕手掌与手指连接部位的关节左右摆动,达到功能提升、完善康复动作的效果。的效果。的效果。
技术研发人员:刘晓华
受保护的技术使用者:刘晓华
技术研发日:2022.04.28
技术公布日:2022/12/9
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1