一种精确标定执行器位置的示踪器的制作方法
1.本实用新型属于示踪设备技术领域,更具体地说,是涉及一种精确标定执行器位置的示踪器。
背景技术:
2.在机器人辅助导航系统中,执行器上安装有手术工具,为了确定执行器末端的手术工具的位置,需要设置示踪器。现有的示踪器通常只能固定在距离手术工具末端较远的位置以避免因手术工具的运动而产生位置变化或对手术工具产生干涉。示踪器距离目标标示位置越远,示踪器所标示的位置精度越差,并且像髋臼锉之类的手术工具需要安装在杆状的执行器上,且髋臼锉的型号众多,安装和加工精度也存在误差,髋臼锉的末端位置并不能被机器人系统所确定。
3.因此需要一种可快装于执行器并能快拆的示踪器用来精确标定手术工具的空间位置。
技术实现要素:
4.本实用新型的目的在于提供一种精确标定执行器位置的示踪器,旨在解决现有技术中存在的上述技术问题。
5.为实现上述目的,本实用新型采用的技术方案是:提供一种精确标定执行器位置的示踪器,包括:
6.架体,设有径向定位结构和末端定位结构,所述径向定位结构用于与所述执行器可拆卸连接以确定所述执行器的径向位置;所述末端定位结构用于与所述执行器末端抵接以确定所述执行器的轴向位置;
7.定位标记,设置于所述架体上,用于提示所述示踪器的位置信息。
8.结合上述可能的实施方式,在第二种可能的实现方式中,所述径向定位结构为开合结构,所述开合结构用于夹抱所述执行器,以与所述执行器形成预定的径向定位关系。
9.结合上述可能的实施方式,在第三种可能的实现方式中,所述开合结构包括设置在所述架体上的第一定位部和与所述架体活动连接的活动件,所述活动件设置有与所述第一定位部对应的第二定位部,通过所述第一定位部与所述第二定位部的配合夹抱所述执行器。
10.结合上述可能的实施方式,在第四种可能的实现方式中,所述第一定位部和所述第二定位部,在夹抱状态下,呈凹槽形、半圆形或“v”型。
11.结合上述可能的实施方式,在第五种可能的实现方式中,所述第一定位部轴线与所述执行器的轴线方向平行。
12.结合上述可能的实施方式,在第六种可能的实现方式中,所述活动连接为铰接。
13.结合上述可能的实施方式,在第七种可能的实现方式中,所述末端定位结构为平面结构,所述平面结构用于与所述执行器抵接并形成预定的轴向定位关系。
14.结合上述可能的实施方式,在第八种可能的实现方式中,所述平面结构垂直于所述执行器轴的轴线方向。
15.结合上述可能的实施方式,在第九种可能的实现方式中,所述架体设有沿第一方向设置的延伸段,所述延伸段上固定或可拆卸地设置有所述末端定位结构。
16.结合上述可能的实施方式,在第十种可能的实现方式中,径向定位结构为压紧固定结构,压紧固定结构包括压紧面和压紧件,压紧面固定于架体,压紧件相对于压紧面设置且可沿相对于压紧面的方向移动,压紧件为弹珠和/或顶丝。
17.本实用新型提供的一种精确标定执行器位置的示踪器的有益效果在于:与现有技术相比,本实用新型一种精确标定执行器位置的示踪器,通过径向定位结构限制执行器的径向位置,末端定位结构用于限制执行器的轴向位置,径向定位结构、末端定位结构分别与执行器(手术工具)具有预定的位置关系,然后结合定位标记(反光球)的位置信息,导航系统可以精准的获知执行器(手术工具)的实际位置。本实用提供的一种精确标定执行器位置的示踪器具有操作过程简单快捷,标定精度高的特点。
附图说明
18.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
19.图1为本实用新型实施例提供的一种精确标定执行器位置的示踪器的结构示意图一;
20.图2为本实用新型实施例提供的一种精确标定执行器位置的示踪器的结构示意图二;
21.图3为本实用新型实施例提供的一种精确标定执行器位置的示踪器的爆炸示意图;
22.图4为本实用新型实施例提供的一种精确标定执行器位置的示踪器所采用的架体的结构示意图;
23.图5为本实用新型实施例提供的一种精确标定执行器位置的示踪器所采用的活动件的结构示意图;
24.图6为本实用新型实施例提供的一种精确标定执行器位置的示踪器与执行器的连接状态图。
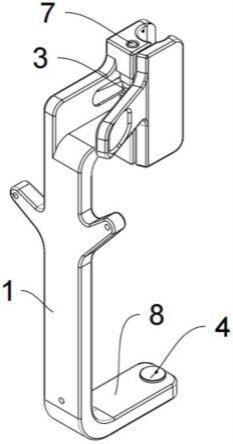
25.图中:1、架体;2、定位标记;3、扭簧;4、末端定位结构;5、第一定位部;6、活动件;7、转轴;8、延伸段。
具体实施方式
26.为了使本实用新型所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
27.请一并参阅图1至图6,现对本实用新型提供的一种精确标定执行器位置的示踪器
进行说明。所述一种精确标定执行器位置的示踪器,包括:架体1以及定位标记2,架体1上设有径向定位结构、末端定位结构4,径向定位结构用于确定执行器的径向位置;末端定位结构4用于与执行器末端抵接以确定执行器的轴向位置;定位标记2设置于架体1上,用于提示示踪器的位置信息。径向定位结构、末端定位结构4均与定位标记2有确定的位置关系。
28.本实用新型提供的一种精确标定执行器位置的示踪器,与现有技术相比,通过径向定位结构限制执行器的径向位置,末端定位结构4用于限制执行器的轴向位置,径向定位结构、末端定位结构4分别与执行器具有预定的位置关系,然后结合定位标记2(如反光球)的位置信息,导航系统可以精准的获知执行器(手术工具)的实际位置。本实用提供的一种精确标定执行器位置的示踪器具有操作过程简单快捷,标定精度高的特点。
29.需要说明的是,手术工具包括但不限于髋臼锉,髓腔铰刀,持杯器等。定位标记为反光球等结构。
30.在一些实施例中,请一并参阅图1至图6,径向定位结构为开合结构,开合结构用于夹抱执行器,以与执行器形成预定的径向定位关系。开合结构结构简单,方便使用。末端定位结构4为平面结构,平面结构用于与执行器抵接并形成预定的轴向定位关系。平面结构垂直于执行器轴的轴线方向。
31.在一些实施例中,开合结构包括设置在架体1上的第一定位部5和与架体 1活动连接的活动件6,活动件6设置有与第一定位部5对应的第二定位部,通过第一定位部5与第二定位部的配合夹抱执行器。
32.在一些实施例中,第一定位部5和第二定位部,在夹抱状态下,呈凹槽形、半圆形、“v”型中的一种或多种。
33.在任一实施例中,第一定位部5的形状为半圆形槽体,该第一定位部5的直径大小与执行器的光轴部位的直径大小相同、轴线相重合,并且轴线与定位标记2平行,即第一定位部5轴线与执行器的轴线方向平行,第一定位部5能够较好地与光轴部位抱合,并与之形成确定的径向定位关系。通过追踪定位标记2的空间位置即可追踪到执行器的轴线位置。
34.在另一实施例中,第一定位部5的形状为“v”型,“v”型形状的设置使该种精确标定执行器位置的示踪器具有较高的定位精度。
35.在另一实施例中,第一定位部5由上至下分为第一部和第二部,第一部的形状为半圆形槽体,第二部的形状为“v”型槽体。
36.第一定位部5与架体1为一体结构。保证了该示踪器的定位精度。
37.需要说明的是,第一定位部5也与架体1之间也可以采用组装的形式。
38.在一些实施例中,请一并参阅图1至图6,活动连接为铰接。具体的是,活动件6通过连接结构与架体1连接;连接结构包括安装于架体1上的扭簧3 以及转轴7,扭簧3用来施加旋紧力;转轴7用来限制活动件6转动方向、扭簧3形变方向中的至少一种。具体的是,架体1上安装转轴7,扭簧3及活动件6。
39.活动件6可绕转轴7转动,第二定位部用来与第一定位部5一起形成径向定位结构,抱紧执行器的光轴部分,扭簧3用来施加抱紧力,使执行器的光轴部分与架体1上的径向定位结构靠紧。
40.手捏夹子的方式将活动件6打开并夹在执行器的光轴上,同时沿轴向推动执行器,使执行器的尖端与末端定位结构4接触。松手后在扭簧3施加的抱紧力作用下,执行器停留
在标定位置。操作过程简单快捷,标定精度高。
41.在一些实施例中,活动连接也可以为通过螺母螺杆方式螺纹连接。具体的是,架体1上设置一个螺母螺杆结构,活动件6以螺母的形式向架体1靠近实现对光轴的夹抱。
42.在一些实施例中,径向定位结构为压紧固定结构,压紧固定结构包括压紧面和压紧件,压紧面固定于架体1,压紧件相对于压紧面设置且可沿相对于压紧面的方向移动。压紧件为弹珠和/或顶丝。
43.在一些实施例中,请一并参阅图1至图6,架体1设有沿水平方向设置的延伸段8,延伸段8上设有末端定位结构4。
44.末端定位结构4可拆卸的设置在延伸段8上。具体的是,延伸段8背离架体1的一端设有螺孔,螺孔位置安装有螺钉以及用于固定螺钉的螺母。螺钉、螺母组成末端定位结构4,螺钉的上端面为平面即为末端定位面。延伸段8与架体1的连接位置作弧度过渡。末端定位结构用于与执行器末端的手术工具形成预定的轴向定位关系,根据该定位关系、定位标记2的位置信息以及定位标记2与末端定位结构4的位置关系可以确定出手术工具的位置。
45.延伸段8与架体1为一体结构。保证了该示踪器的定位精度。
46.需要说明的是,延伸段8也与架体1之间也可以采用组装的形式。
47.在一些实施例中,请一并参阅图1至图5,第一定位部5轴线与定位标记2 的安装面平行.末端定位结构4与定位标记2的安装面垂直。末端定位结构4 可用于限制执行器的轴向位置。
48.在一些实施例中,架体1的上端设有径向定位结构,架体1的下端设有末端定位结构4。通过活动件6、扭簧3、转轴7以及第一定位部5的配合实现该示踪器与执行器的连接,同时可限制执行器的径向位置。
49.第一定位部5的轴线及末端定位结构4的圆心在三个标记点所确定的坐标系内有确定的位置。通过定位标记2可获得执行器的轴线及刃尖在坐标系内的位置。可以在标定后快速取下避免运动过程及铣削过程的干涉,定位标记2可以距离执行器较近,定位精度高。
50.在一些实施例中,定位标记2的数量可以为1个或多个,具体的可以是3 个,3个定位标记2确定一个平面,能够较准确地通过该参考平面确定执行器及末端手术工具的位置,提高该示踪器的定位效果。
51.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1