一种医用肩关节被动训练康复装置的制作方法
1.本技术涉及医疗康复器械的领域,尤其是涉及一种医用肩关节被动训练康复装置。
背景技术:
2.康复训练是指损伤后进行有利于恢复或改善功能的身体活动,除严重的损伤需要休息治疗外,一般的损伤不必完全停止身体练习,适当的、科学的身体练习对于损伤的迅速愈合和促进功能的恢复有着积极的作用,通过康复训练可以预防肌肉萎缩和挛缩,健康肢体的运动能力。
3.肩关节指上肢与躯干连接的部分,包括臂上部、腋窝、胸前区及肩胛骨所在的背部区域,主要包括盂肱关节、肩锁关节、胸锁关节、肩胛胸壁关节,是人体活动度最大的关节,当患者因外伤、脑卒中等疾病导致肩关节受损,出现肩部疼痛、肩关节粘连后运动功能障碍,需要进行肩关节的康复训练,在肩部的康复训练时,一般会使用训练康复装置对肩部进行转动的康复训练。
4.针对上述中的相关技术,发明人认为一般患者在肩关节损伤时,同时也需要对位于肩关节下方的手臂进行训练,通过转动手臂提高肩关节的运动范围,现有的训练康复装置只能单独的对肩部进行转动训练,对整体的肩关节和手臂位置处的康复训练效果较差。
技术实现要素:
5.为了同时能够对肩关节和位于肩关节下方的手臂位置处进行康复训练,提高整体的训练效果,本技术提供一种医用肩关节被动训练康复装置。
6.本技术提供的一种医用肩关节被动训练康复装置,采用如下的技术方案:
7.一种医用肩关节被动训练康复装置,包括有底座,所述底座的一侧转动连接有第一训练臂,所述第一训练臂的下方转动连接有第二训练臂,所述第一训练臂的一侧设置有驱动所述第一训练臂转动的第一驱动件,所述第二训练臂的一侧设置有驱动所述第二训练臂转动的第二驱动件。
8.通过采用上述技术方案,通过第一驱动件带动第一训练臂转动,进而通过第一训练臂对肩部的位置处进行康复训练,通过第二驱动件带动第二训练臂转动,进而通过第二训练臂对手臂位置处进行康复训练,同时能够对肩关节和位于肩关节下方的手臂位置处进行康复训练,提高整体的训练效果。
9.可选的,所述底座上水平转动连接有旋转轨道,所述旋转轨道呈弧形结构,且弧线的圆心位于所述旋转轨道靠近底座的一侧,所述底座靠近所述旋转轨道的一侧设置有驱动所述旋转轨道转动的调节结构,所述第一训练臂与所述旋转轨道通过连接结构相连。
10.通过采用上述技术方案,通过调节结构带动旋转轨道在底座上的位置处进行转动,进而调节康复结构位于底座上的相对位置,进而便于根据不同的使用人员的肩部和胳膊的位置进行调节。
11.可选的,所述调节结构包括有套设在所述旋转轨道外侧的驱动壳,所述驱动壳与所述底座通过升降结构相连,所述驱动壳的内部转动连接有驱动滚轮,所述驱动滚轮与所述旋转轨道的侧壁抵接且阻尼滚动,所述驱动壳的内部设置有驱动所述驱动滚轮转动的第三驱动件。
12.通过采用上述技术方案,通过第三驱动件带动驱动滚轮进行转动,且驱动滚轮带动旋转轨道进行转动,进而调节旋转轨道在底座上的相对位置。
13.可选的,所述连接结构包括有位于所述旋转轨道上水平设置的安装杆,所述第一训练臂靠近所述安装杆的一侧固定连接有安装套,所述安装套能够套设在所述安装杆的外侧,所述安装杆与所述安装套通过锁定件固定。
14.通过采用上述技术方案,通过将安装套套设在安装杆上,且通过锁定件将安装套和安装杆相对固定,进而将康复结构固定在安装杆上,且便于对康复结构进行拆卸修理。
15.可选的,所述升降结构包括有竖直设置的螺杆,所述螺杆与所述底座转动连接,所述底座上相对于所述螺杆的一端固定连接有驱动所述螺杆转动连接的第四驱动件,所述驱动壳与所述螺杆螺纹连接。
16.通过采用上述技术方案,通过第四驱动件带动螺杆转动,进而螺杆对驱动壳进行升降移动,便于根据操作人员的肩部高度和手臂位置处的高度进行调整。
17.可选的,所述安装杆设置两个且位于所述旋转轨道的端部。
18.通过采用上述技术方案,通过设置的两个安装杆,便于将康复结构安装在底座不同边侧的安装杆上,进而便于对使用人员的左臂和右臂进行康复训练,且减少整体机器的成本。
19.可选的,所述第二训练臂背离所述第一训练臂的一端转动连接有手闸,所述手闸顶端安装有控制开关,所述控制开关分别与所述第一驱动件和所述第二驱动件信号相连,通过控制开关能够控制所述第一驱动件和所述第二驱动件关闭。
20.通过采用上述技术方案,通过设置的手闸能够便于使用人员在康复训练的过程中手部位置处的扶持,且通过控制开关对第一驱动件和第二驱动件进行控制,提高整体使用的安全性能。
21.可选的,所述底座的底端固定连接有支腿,所述支腿上转动连接有滚轮。
22.通过采用上述技术方案,通过设置在支腿上的滚轮能够便于对支腿进行移动,进而便于对底座进行移动,提高整体装置的可移动性。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.1.通过第一驱动件带动第一训练臂转动,进而通过第一训练臂对肩部的位置处进行康复训练,通过第二驱动件带动第二训练臂转动,进而通过第二训练臂对手臂位置处进行康复训练,同时能够对肩关节和位于肩关节下方的手臂位置处进行康复训练,提高整体的训练效果。
25.2.通过设置的两个安装杆,便于将康复结构安装在底座不同边侧的安装杆上,进而便于对使用人员的左臂和右臂进行康复训练,且减少整体机器的成本。
26.3.通过设置的手闸能够便于使用人员在康复训练的过程中手部位置处的扶持,且通过控制开关对第一驱动件和第二驱动件进行控制,提高整体使用的安全性能。
附图说明
27.图1是本技术实施例中的一种医用肩关节被动训练康复装置的整体结构示意图;
28.图2是本技术实施例中的一种医用肩关节被动训练康复装置的后侧示意图;
29.图3是本技术实施例中的一种医用肩关节被动训练康复装置的调节结构的结构示意图;
30.图4是本技术实施例中的一种医用肩关节被动训练康复装置的驱动壳内部的结构示意图;
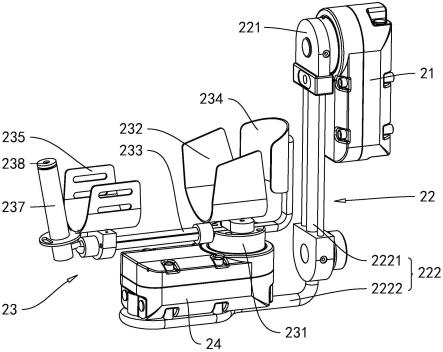
31.图5是本技术实施例中的一种医用肩关节被动训练康复装置的康复结构的结构示意图。
32.附图标记说明:1、底座;11、坐垫部;111、使用侧;112、靠背侧;12、头枕部;13、支腿;14、转轮;2、康复结构;21、第三转动电机;22、第一训练臂;221、第一安装座;222、安装架;2221、竖杆;2222、横杆;23、第二训练臂;231、安装块;232、第一臂托;233、臂托安装架;234、第二臂托;235、手腕安装座;236、手腕托架;237、手闸;238、控制开关;24、第四转动电机;3、升降结构;31、螺杆;32、第一转动电机;4、调节结构;41、驱动壳;42、旋转轨道;43、驱动滚轮;431、第二转动电机;44、限位滚轮;45、安装杆;46、安装套;461、锁紧螺杆。
具体实施方式
33.以下结合附图1-5对本技术作进一步详细说明。
34.本技术实施例公开一种医用肩关节被动训练康复装置。参照图1、图2,一种医用肩关节被动训练康复装置包括底座1,位于底座1的一侧设置有康复结构2,通过康复结构2对人体的肩部和手臂进行康复训练,底座1上设置有驱动康复结构2上下移动的升降结构3,升降结构3上设置有驱动康复结构2沿着水平周向转动的调节结构4。
35.底座1包括有坐垫部11以及位于坐垫部11顶端铰接设置的头枕部12,坐垫部11的一侧为用于使用人员使用的使用侧111以及背离使用侧111一侧的靠背侧112,位于坐垫部11的下方固定连接有支腿13,通过支腿13将坐垫部11支撑在地面上,且支腿13背离坐垫部11的一端下端转动连接有转轮14,通过将底座1朝向背离使用侧111的一侧转动,进而将转轮14接地,便于将底座1进行移动。
36.参照图3、图4,升降结构3包括有位于坐垫部11背离使用侧111一侧竖直设置的螺杆31,螺杆31与坐垫部11之间转动连接,且坐垫部11位于螺杆31的底端固定连接有第一转动电机32,第一转动电机32的电机轴与螺杆31之间同轴且固定连接。
37.调节结构4包括有螺纹连接在螺杆31上的驱动壳41,驱动壳41的内部水平穿设有旋转轨道42,旋转轨道42与驱动壳41之间滑动连接,旋转轨道42为弧形结构,且弧线的圆心位于旋转轨道42靠近坐垫部11的一侧。
38.驱动壳41的内部位于旋转轨道42的内侧以及外侧分别设置有驱动滚轮43,位于内侧的驱动滚轮43与旋转轨道42的内侧壁抵接且阻尼滚动相连,位于外侧的驱动滚轮43与旋转轨道42的外侧壁抵接且阻尼滚动相连。驱动壳41的内部相对于驱动滚轮43的位置固定连接有第二转动电机431,第二转动电机431的电机轴与驱动滚轮43同轴且固定连接,通过第二转动电机431带动驱动滚轮43转动,进而带动旋转轨道42在驱动壳41的内部水平滑动。
39.驱动壳41的内部相对于旋转轨道42的顶壁和底壁分别转动连接有限位滚轮44,限
位滚轮44与旋转轨道42之间抵接且相对滚动连接。
40.旋转轨道42的两端分别转动连接有安装杆45,安装杆45水平设置。康复结构2靠近安装杆45的一侧固定连接有安装套46,安装套46水平设置,且安装套46套设在其中一个安装杆45上且相对滑动连接,位于安装套46背离康复结构2的一侧水平设置有锁紧螺杆461,锁紧螺杆461将安装套46背离康复结构2的一侧侧壁贯穿且相对螺纹连接,进而通过锁紧螺杆461将安装套46与安装杆45顶紧固定。通过相对设置的两个安装杆45,能够将康复结构2安装在不同的安装杆45上,进而对左右肩部进行训练。
41.参照图1、图5,康复结构2包括有固定在安装套46背离安装杆45一侧的第三转动电机21,第三转动电机21的转动轴上固定连接有第一训练臂22,第一训练臂22的底端水平设置有第二训练臂23。第一训练臂22包括有与第三转动电机21的电机轴固定连接有第一安装座221,第一安装座221的下方固定设置有安装架222,安装架222包括有竖直设置的竖杆2221以及位于竖杆2221下方水平设置的横杆2222,竖杆2221与横杆2222为一体结构。
42.第二训练臂23位于横杆2222的上方,且横杆2222上方固定连接有第四转动电机24,第四转动电机24的电机轴的上方与第二训练臂23固定连接。第二训练臂23包括有与第四转动电机24的电机轴固定连接有安装块231,安装块231上固定连接有第一臂托232,第一臂托232呈弧形结构,且弧线的圆心位于第一臂托232的上方。安装块231上水平固定连接有臂托安装架233,且臂托安装架233靠近竖杆2221的一侧固定连接有第二臂托234,第二臂托234为弧形结构,且弧线的圆心位于第二臂托234靠近第一臂托232的一侧。
43.臂托安装架233背离第一臂托232的一端滑动套设有手腕安装座235,手腕安装座235的顶端固定连接有手腕托架236。臂托安装架233背离第一臂托232的一端铰接设置有手闸237,手闸237的顶端设置有控制开关238,控制开关238与第三转动电机21信号连接,且控制开关238还与第四转动电机24信号连接,通过使用人员摁动控制开关238,使得控制开关238对第三转动电机21和第四转动电机24的电机轴停止转动。
44.本技术实施例一种医用肩关节被动训练康复装置的实施原理为:使用人员坐在坐垫部11上,且将胳膊放置在第二训练臂23上,通过第三转动电机21带动第一训练臂22转动,且通过第四转动电机24带动第二训练臂23转动,进而对肩部以及胳膊位置处进行康复训练。
45.通过第一转动电机32带动丝杠转动,进而丝杠能够带动安装壳上下移动,从而便于对旋转轨道42的高度进行调节,进而对康复结构2的高度进行调节。
46.通过第二转动电机431带动驱动滚轮43转动,进而滚轮带动旋转轨道42转动,从而便于使用人员根据不同的位置进行调节康复结构2的位置。
47.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1