一种用于软组织松解的可视化便携式微创手术套装
1.本实用新型涉及医疗器械领域,尤其是涉及一种用于软组织松解的可视化便携式微创手术套装。
背景技术:
2.软组织疾病发病率高,且往往疼痛明显,影响患者日常生活,内镜手术治疗越来越得到业内人士青睐,与传统开放性手术相比,其疗效更优、术后恢复更快、瘢痕更小、更美观。
3.如申请号为201621458352.2的中国实用新型公开了一种关节介入套装,设置了包括扩张器、套管、钩刀、剥离器等一系列设备进行内镜手术。但是,该关节介入套装的设备较多,而且还需要配合额外的内窥显示设备,导致现场设备多、操作难度大,导致手术台上各种导线导管缠绕,给手术带来不必要的麻烦。
技术实现要素:
4.本实用新型的目的就是为了克服上述现有技术存在的缺陷而提供一种用于软组织松解的可视化便携式微创手术套装。
5.本实用新型的目的可以通过以下技术方案来实现:
6.一种用于软组织松解的可视化便携式微创手术套装,包括集成套管、钩刀和取物器;
7.所述集成套管包括同轴设置的套管本体和套管手持部,所述集成套管内设有贯穿套管本体和套管手持部轴向的吸引通路,所述套管本体的前端设有摄像头单元,所述套管手持部的顶面设有向套管本体倾斜的斜槽,所述套管本体的顶面设有腰圆槽,所述腰圆槽的轴向和套管本体轴向平行,所述斜槽和腰圆槽的端面相切;
8.所述钩刀或取物器可装入斜槽和腰圆槽内。
9.进一步地,所述吸引通路内设有轴向的隔板,所述隔板在吸引通路内形成安装轴孔,所述摄像头单元的固定在安装轴孔的前端,所述摄像头单元的导线穿过安装轴孔从套管手持部处的安装轴孔尾端引出,连接外置的显示设备。
10.进一步地,所述摄像头单元包括微型摄像头和环形光源,所述环形光源围绕微型摄像头的镜头外圈设置。
11.进一步地,所述钩刀包括刀体和手柄,所述刀体的刀身一端设有电极部,用于电凝止血。
12.进一步地,刀体的刀刃与刀身呈90度夹角。
13.进一步地,所述取物器包括卡爪、驱动机构和套柄,所述套柄的前端开口,所述驱动机构设置在套柄内,所述卡爪连接驱动机构并且从开口处伸出,所述套柄的一侧设有第一控制按钮,用于操作驱动机构控制卡爪进行伸缩和开合。
14.进一步地,所述卡爪包括至少三根爪勾,所述驱动机构包括电机、限位管、螺纹杆
和滑动块,所述电机固定在限位管的一端,连接电机的螺纹杆转动设置于限位管内,所述限位管上设有爪勾槽,每根爪勾的一端伸出套柄,另一端穿过爪勾槽连接套设于螺纹杆上的滑动块。
15.进一步地,所述取物器还包括伸缩杆和磁吸件,所述伸缩杆底端连接驱动机构,所述磁吸件设置于伸缩杆的另一端并且从套柄伸出。
16.进一步地,所述套柄上设有操作伸缩杆的第二控制按钮。
17.进一步地,所述套管手持部的两侧设有翼板。
18.与现有技术相比,本实用新型具有以下有益效果:
19.1、改良了传统的内镜理念,直接在集成套管上设置摄像头单元,可使部分微创手术操作无需再额外配备内镜系统,进而降低操作的技术难度,使手术过程更加高效、安全;同时,集成套管上还集成了吸引通路,用于直接外连吸取设备进行血液和组织液的吸取,提高操作便利性。
20.2、在钩刀上直接集成了电极部,可以替代传统电凝的使用,便于操作。
21.3、设计了操作方便的取物器并集成了磁吸件,便于手术过程中器件的植入和取出。
22.综上,本实用新型采用高度集成的方案,将介入手术所需装置集成为集成套管、钩刀和取物器是三个设备,实现结构最简化。
附图说明
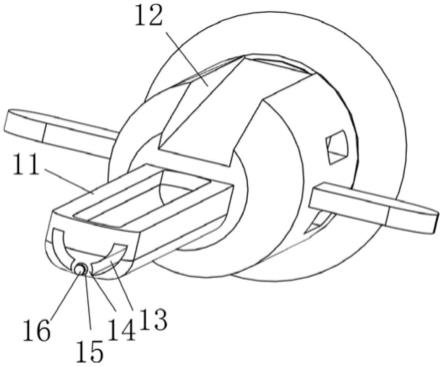
23.图1为本实用新型集成套管的结构示意图。
24.图2为本实用新型钩刀的结构示意图。
25.图3为本实用新型取物器的结构示意图。
26.图4为本实用新型集成套管的轴向示意图。
27.图5为本实用新型取物器的剖视示意图。
28.附图标记:1、集成套管,11、套管本体,111、腰圆槽,12、套管手持部,121、斜槽,122、翼板,13、吸引通路,14、隔板,15、安装轴孔,16、摄像头单元,2、钩刀,21、刀体,22、手柄,23、电极部,3、取物器,31、卡爪,32、驱动机构,33、套柄,321、电机,322、限位管,323、螺纹杆,324、滑动块,34、伸缩杆,35、磁吸件,36、第一控制按钮,37、第二控制按钮。
具体实施方式
29.下面结合附图和具体实施例对本实用新型进行详细说明。本实施例以本实用新型技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本实用新型的保护范围不限于下述的实施例。
30.如图1~图3所示,本实施例提供了一种用于软组织松解的可视化便携式微创手术套装,包括集成套管1、钩刀2和取物器3。集成套管1包括同轴设置的套管本体11和套管手持部12。套管本体11的顶面设有腰圆槽111,该腰圆槽111的轴向和套管本体11轴向平行。在套管手持部12的顶面设有向套管本体11倾斜的斜槽121,斜槽121和腰圆槽111的端面相切。通过上述结构,钩刀2或取物器3可以装入斜槽121和腰圆槽111内,配合集成套管1完成各种手术操作。在套管手持部12的两侧还可以设有翼板122,提高集成套管1操作时候的稳定性。
31.如图4所示,集成套管1内设有贯穿套管本体11和套管手持部12轴向的吸引通路13,该吸引通路13的轴向和集成套管1的轴向平行。吸引通路13位于套管手持部12尾部的一端可以连接特制端口的吸引器,进行组织液或者血液的吸取。吸引通路13的截面为半圆环形,在吸引通路13内的中央设有两条轴向的隔板14,使得吸引通路13的中央形成安装轴孔15。在套管本体11最前端的安装轴孔15处固定有摄像头单元16,摄像头单元16的导线穿过安装轴孔15从套管手持部12处的安装轴孔15尾端引出,连接外置的显示设备,从而可以直接替代传统的设备庞大的内镜系统。摄像头单元16具体包括微型摄像头和环形光源,环形光源围绕微型摄像头的镜头外圈设置,确保摄像清晰。
32.如图2所示,钩刀2包括刀体21和手柄22,刀体21的刀身一端设有电极部23,用于电凝止血。电极部23通过穿过手柄22的金属刀体21连接导线和外置电源,从而不在使用额外的电凝止血设备,简化操作。同时,本实施例中,刀体21的刀刃与刀身呈90度夹角,既便于由远及近切割软组织,又可保证操作的安全。
33.如图3和图5所示,取物器3包括卡爪31、驱动机构32和套柄33。套柄33的内部中空,前端设有开口。驱动机构32设置在套柄33内,卡爪31连接驱动机构32并且从开口处伸出。套柄33的一侧设有第一控制按钮36,用于操作驱动机构32控制卡爪31进行伸缩和开合。本实施例中,卡爪31和驱动机构32的具体结构如下:驱动机构32包括电机321、限位管322、螺纹杆323和滑动块324。限位管322固定在套柄33内,电机321固定在限位管322的下端,螺纹杆323的一端穿过限位管322的下端后连接电机321上,螺纹杆323的上端转动连接限位管322的上端。在限位管322内设有滑动块324,滑动块324通过自身的螺纹孔套设于螺纹杆323上。卡爪31包括多根独立的爪勾,本实施例中采用三根,在限位管322的侧壁上设有三个爪勾槽,每根爪勾的一端伸出套柄33,另一端穿过爪勾槽后滑动块324。由此,螺杆和或滑动块324组成了丝杠结构,当电机321正传或者反转时,电机321通过螺纹杆323带动滑动块324沿着螺纹杆323的轴向前后移动。每根爪勾和滑动块324的连接处具有一定的弹性,当滑动块324向着套柄33开口移动时,卡爪31从开口伸出,并且每根爪勾外扩张开;当滑动块324远离套柄33开口移动时,卡爪31从开口回缩,并且每根爪勾向中心合拢。套柄33一侧的第一控制按钮36用于控制电机321的正转、反转和停止。
34.本实施例中,取物器3还包括伸缩杆34和磁吸件35,伸缩杆34底端连接限位管322的顶部,磁吸件35设置于伸缩杆34的顶端并且从套柄33伸出。在套柄33上设有操作伸缩杆34的第二控制按钮37。
35.本实施例的工作原理为:手术时,在操作部位做一个0.8cm左右切口,先以扩口器向深处扩口,然后置入该集成套管1,启动摄像头单元16,连接外置显示器,连接吸引器。若需要松解软组织,可使用钩刀2在显示器的直视下松解,操作同时可用钩刀2的电凝部进行止血;若需取出深部异物,则使用取物器3以卡爪31将其取出,若是小块金属异物难以夹取,可使用磁棒将其吸出。
36.综上所述,本实施例具有以下优点:
37.高集成性、高效性:采用高度集成技术,将介入手术所需套管、吸引器、光源、摄像头等整合一体,改良了传统的内镜理念,可使部分微创手术操作无需再额外配备内镜系统,进而降低操作的技术难度,使手术过程更加高效、安全。
38.普及性:该手术套装的研发成本远低于传统内镜系统,因此,在基层医院及偏远地
区,即使没有配备标准内镜监视系统,也可以开展微创、精准的手术操作。
39.便携性:该手术套装体积适中,具有便携性,可应用于军队战备、急救时使用,如取子弹、取异物、止血等。
40.以上详细描述了本实用新型的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本实用新型的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本实用新型的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1