穿刺机器人系统的制作方法
本技术涉及医用设备,尤其是一种用于带有超声引导的穿刺机器人系统。
背景技术:
1、穿刺机器人系统在组织活检、肿瘤消融等介入手术中的应用越来越广泛。由于手术机器人具有准确性和稳定性的特点,所以超声引导在穿刺手术机器人系统中的应用越来越多。
2、乳腺癌是女性中最常见的癌症之一,全球乳腺癌发病率自20世纪70年代末开始一直呈上升趋势。乳腺介入手术具有创伤小、恢复快、并发症少、不影响人体美观等特点。对于女性乳腺疾病的检查、治疗具有重要意义。但是人工手术操作繁琐,技术难度大,不易被一般医生所掌握,而且精度不高,手术持续时间较长时,医生很容易因疲劳造成手术质量下降。
3、针对人工手术的不足,提出一种超声引导的穿刺机器人系统,相比于传统活检程序依赖外科医生手动进针,穿刺机器人系统提供更高的刚度及精确度,也不存在疲劳和失误带来的精度误差。
技术实现思路
1、本技术的目的是在于克服现有技术中存在的不足,提供一种可固定不同大小超声探头的穿刺机器人系统。
2、为实现以上技术目的,本技术提供了一种穿刺机器人系统,包括:
3、超声探头,所述超声探头设有中心扫查面;
4、穿刺组件,所述穿刺组件包括穿刺针,所述穿刺针可相对超声探头移动;
5、调节机构,所述调节机构用于在垂直于中心扫查面的方向上调节穿刺针的位置,使得穿刺针位于中心扫查面上。
6、在优选的实施方式中,还包括用于安装超声探头的基座和将基座与穿刺组件连接起来的驱动组件,所述驱动组件包括绕第一旋转轴转动的第一驱动件、绕第二旋转轴转动的第二驱动件和绕第三旋转轴转动的第三驱动件,所述第一旋转轴、第二旋转轴和第三旋转轴均与中心扫查面相垂直。
7、在优选的实施方式中,所述基座的前侧设有位于超声探头下方的两个并排设置的摄像头,所述基座还设有向下延伸形成的延伸部,所述第一驱动件连接到延伸部。
8、在优选的实施方式中,所述第一驱动件、第二驱动件和第三驱动件位于穿刺组件的下方,当转动到一定角度时,所述第一驱动件和/或第二驱动件可位于穿刺组件的下方。
9、在优选的实施方式中,在传递线路上所述第二驱动件设于第一驱动件和第三驱动件之间,所述第一驱动件较第二驱动件更靠近基座,所述第三驱动件较第二驱动件更靠近穿刺组件,所述调节机构设于第二驱动件和第三驱动件之间。
10、在优选的实施方式中,所述调节机构包括固定第二驱动件上的第一滑动件和固定到第三驱动件上的第二滑动件,所述第一滑动件可相对第二滑动件滑动,所述第一滑动件相对第二滑动件的滑动方向与中心扫查面相垂直。
11、在优选的实施方式中,所述第一滑动件设有凹槽,所述第二滑动件置于凹槽内,所述调节机构还包括连接到第二滑动件上的螺栓,通过转动螺栓来调节第一滑动件和第二滑动件之间的相对位置。
12、在优选的实施方式中,所述第一驱动件、第二驱动件和第三驱动件均为舵机,所述驱动组件还包括用于安装第一驱动件且呈“u”形的第一连接件以及用于安装第二驱动件且呈“u”形的第二连接件,所述第一连接件和第二连接件固定到一起,所述第一驱动件可相对第一连接件转动,所述第二驱动件可相对第二连接件转动。
13、在优选的实施方式中,所述穿刺组件包括固定到第三驱动件的底座以及连接到底座且可相对底座沿穿刺方向移动的运动件,所述穿刺针固定到运动件的端部。
14、在优选的实施方式中,所述穿刺组件还包括可沿穿刺方向来回移动的滑块、用于安装运动件的安装座,所述滑块与安装座之间设有传感器,当退针时,滑块带动传感器并带动穿刺针往后退;当进针时,滑块推动传感器并带动穿刺针前进,并检测穿刺针的阻力。
15、为实现以上技术目的,本技术提供了一种穿刺机器人系统,包括:
16、超声探头组件,所述超声探头组件包括超声探头以及设于超声探头下方的基座,所述基座设有向下延伸的延伸部,所述超声探头设有中心扫查面;
17、穿刺组件,所述穿刺组件包括底座、连接到底座且可相对底座沿穿刺方向移动的运动件以及固定到运动件端部的穿刺针;
18、驱动组件,所述驱动组件包括绕第一旋转轴转动的第一驱动件、绕第二旋转轴转动的第二驱动件和绕第三旋转轴转动的第三驱动件,所述第一旋转轴、第二旋转轴和第三旋转轴均与中心扫查面相垂直,所述第一驱动件固定到延伸部,所述穿刺组件固定到第三驱动件。
19、在优选的实施方式中,所述驱动组件还包括用于安装第一驱动件且呈“u”形的第一连接件以及用于安装第二驱动件且呈“u”形的第二连接件,所述第一连接件和第二连接件固定到一起,所述第一驱动件可相对第一连接件转动,所述第二驱动件可相对第二连接件转动。
20、在优选的实施方式中,还包括呈“l”形的第三连接件,所述第三连接件的一端与延伸部相连接、另一端与第一驱动件相连接,所述第一驱动件位于超声探头的侧下方。
21、在优选的实施方式中,所述第一驱动件、第二驱动件和第三驱动件均为舵机,在穿刺组件转动到一定角度时,所述穿刺组件位于第一驱动件和/或第二驱动件的上方。
22、在优选的实施方式中,还包括设有基座前端且位于超声探头下方的两个并排设置的摄像头。
23、在优选的实施方式中,还包括设于第二驱动件和第三驱动件之间的调节机构,所述调节机构用于在垂直于中心扫查面的方向上调节穿刺针的位置,使得穿刺针位于中心扫查面上。
24、在优选的实施方式中,所述调节机构包括固定第二驱动件上的第一滑动件和固定到第三驱动件上的第二滑动件,所述第一滑动件可相对第二滑动件滑动,所述第一滑动件相对第二滑动件的滑动方向与中心扫查面相垂直。
25、在优选的实施方式中,所述第一滑动件设有凹槽,所述第二滑动件置于凹槽内,所述调节机构还包括连接到第二滑动件上的螺栓,通过转动螺栓来调节第一滑动件和第二滑动件之间的相对位置。
26、在优选的实施方式中,所述第一驱动件相对基座的位置不变,所述第三驱动件可带动穿刺组件转动。
27、在优选的实施方式中,在平行于中心扫查面的平面上,所述第一旋转轴和第二旋转轴的连线与超声探头的中心线的夹角为锐角,所述第一旋转轴到中心线的距离小于第二旋转轴到中心线的距离。
28、为实现以上技术目的,本技术提供了一种穿刺机器人系统,包括:
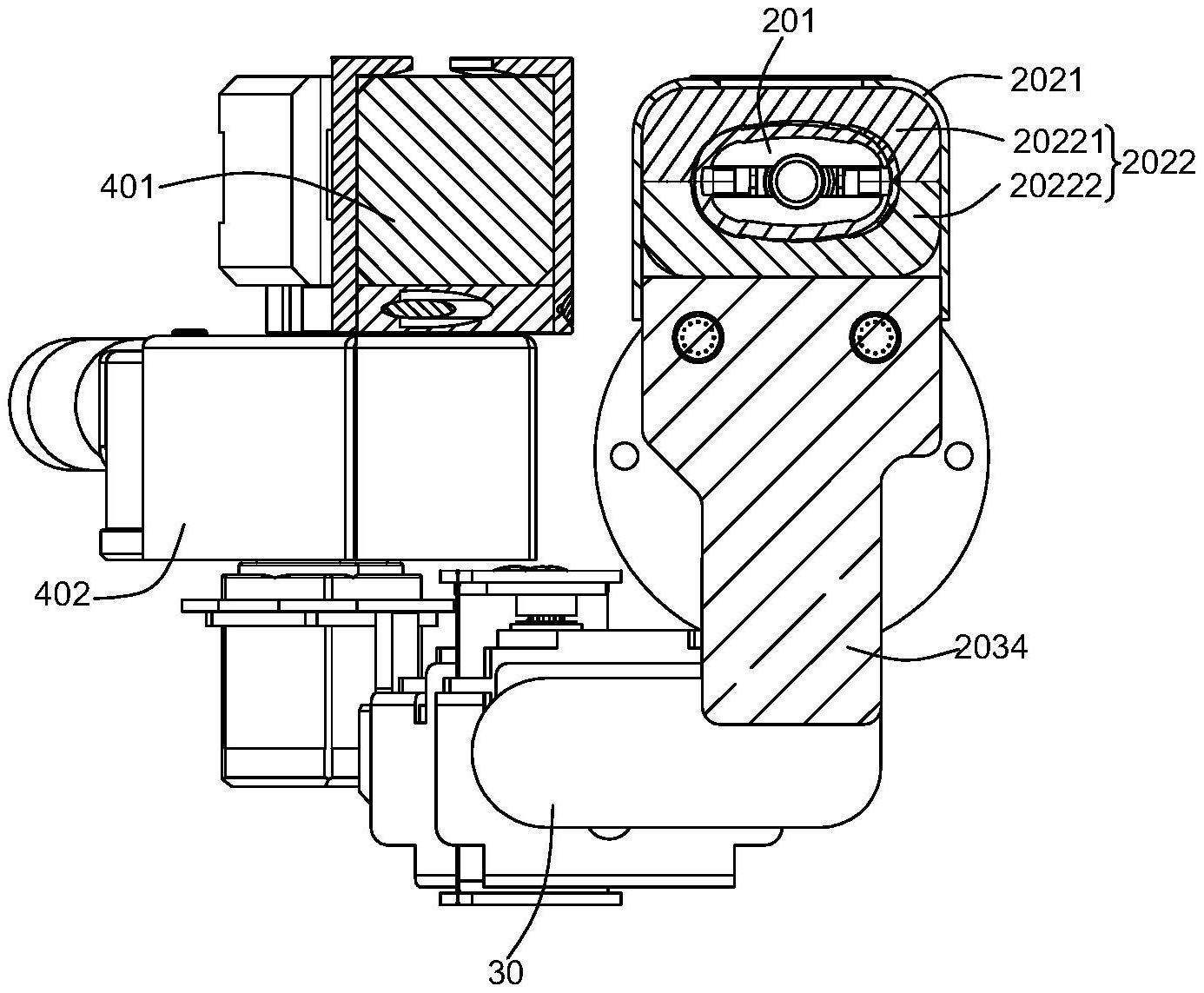
29、超声探头组件,所述超声探头组件包括超声探头、设于超声探头下方的基座以及将超声探头固定到基座上的固定组件,所述基座设有向下延伸的延伸部,所述超声探头设有中心扫查面,所述固定组件包括环绕超声探头的卡持件以及将卡持件固定到基座且可拆卸的固定夹;
30、穿刺组件,所述穿刺组件包括底座、连接到底座且可相对底座沿穿刺方向移动的运动件以及固定到运动件端部的穿刺针;
31、驱动组件,所述驱动组件将超声探头组件和穿刺组件相连接,所述驱动组件可驱动穿刺组件相对超声探头组件运动。
32、在优选的实施方式中,所述卡持件包括位于超声探头一侧的第一卡持件和位于超声探头另一侧的第二卡持件,所述第一卡持件和第二卡持件配合,从而将超声探头固定到第一卡持件和第二卡持件之间。
33、在优选的实施方式中,所述基座包括与延伸部相连的主体部,所述固定组件固定到主体部,所述主体部与延伸部呈“t”字型。
34、在优选的实施方式中,所述主体部的前端设有两个并排设置的摄像头,所述摄像头位于超声探头的下方。
35、在优选的实施方式中,在平行于中心扫查面的方向上,主体部的厚度大于延伸部的厚度。
36、在优选的实施方式中,所述驱动组件的一端固定到延伸部、另一端与穿刺组件相连接。
37、在优选的实施方式中,述驱动组件包括绕第一旋转轴转动的第一驱动件、绕第二旋转轴转动的第二驱动件和绕第三旋转轴转动的第三驱动件,所述第一旋转轴、第二旋转轴和第三旋转轴均与中心扫查面相垂直。
38、所述第一驱动件、第二驱动件和第三驱动件位于穿刺组件的下方,当转动到一定角度时,所述第一驱动件和/或第二驱动件可位于穿刺组件的下方。
39、在优选的实施方式中,在传递线路上所述第二驱动件设于第一驱动件和第三驱动件之间,所述第一驱动件较第二驱动件更靠近基座,所述第三驱动件较第二驱动件更靠近穿刺组件,所述调节机构设于第二驱动件和第三驱动件之间。
40、在优选的实施方式中,所述调节机构包括固定第二驱动件上的第一滑动件和固定到第三驱动件上的第二滑动件,所述第一滑动件可相对第二滑动件滑动,所述第一滑动件相对第二滑动件的滑动方向与中心扫查面相垂直。
41、为实现以上技术目的,本技术提供了一种穿刺机器人系统,包括:
42、超声探头组件,所述超声探头组件包括超声探头以及设于超声探头下方的基座,所述超声探头设有中心扫查面;
43、穿刺组件,所述穿刺组件包括底座、连接到底座且可相对底座沿穿刺方向移动的运动件以及固定到运动件端部的穿刺针,所述穿刺组件包括可沿穿刺方向来回移动的滑块、位于滑块上方用于安装运动件的安装座以及固定到滑块上方的固定座,固定座与安装座之间设有传感器,所述传感器将安装座与固定座连接到一起,所述运动件通过传感器和安装座固定到固定座,固定座设于滑块的后方,当退针时,滑块带动穿刺针往后退;当进针时,滑块推动穿刺针前进,并通过传感器检测穿刺针的阻力;
44、驱动组件,所述驱动组件将超声探头组件和穿刺组件相连接,所述驱动组件可驱动穿刺组件相对超声探头组件运动。
45、在优选的实施方式中,所述传感器为拉压传感器。
46、在优选的实施方式中,所述传感器的端部通过螺栓分别固定到固定座和安装座。
47、在优选的实施方式中,还包括设于滑块下方且与滑块配合的导轨。
48、在优选的实施方式中,所述穿刺组件还包括弹性设置的夹持装置,在需要更换活检针组件时,向侧方拨动夹持装置,即可取下运动件,所述加持装置的一端固定到安装座,另一端为开放式设置。
49、在优选的实施方式中,所述驱动组件的一端固定到延伸部、另一端与穿刺组件相连接
50、在优选的实施方式中,驱动组件包括绕第一旋转轴转动的第一驱动件、绕第二旋转轴转动的第二驱动件和绕第三旋转轴转动的第三驱动件,所述第一旋转轴、第二旋转轴和第三旋转轴均与中心扫查面相垂直。
51、在优选的实施方式中,所述第一驱动件、第二驱动件和第三驱动件位于穿刺组件的下方,当转动到一定角度时,所述第一驱动件和/或第二驱动件可位于穿刺组件的下方。
52、在优选的实施方式中,在传递线路上所述第二驱动件设于第一驱动件和第三驱动件之间,所述第一驱动件较第二驱动件更靠近基座,所述第三驱动件较第二驱动件更靠近穿刺组件,所述调节机构设于第二驱动件和第三驱动件之间。
53、在优选的实施方式中,所述调节机构包括固定第二驱动件上的第一滑动件和固定到第三驱动件上的第二滑动件,所述第一滑动件可相对第二滑动件滑动,所述第一滑动件相对第二滑动件的滑动方向与中心扫查面相垂直。
54、本技术的固定组件包括环绕超声探头的卡持件以及将卡持件固定到基座且可拆卸的固定夹,从而使得不同大小的超声探头均可以固定。
- 还没有人留言评论。精彩留言会获得点赞!