一种用于经皮介入装置更换的离合装置及机器人系统的制作方法
【】本技术涉及机器人辅助装置的,特别涉及一种用于经皮介入装置更换的离合装置及机器人系统。
背景技术
0、
背景技术:
1、介入栓塞手术通常需要外科医生在数字血管造影机、磁共振,及x光影像设备的引导和监视下,利用穿刺针、导管及导丝等首先在人体表面构建微小的创口,从创口送入造影导管构建基本通道,再将导丝穿入导管并确保导丝伸出导管前端,而后施术者在医疗影像指导下将导丝导管穿入创口沿着造影导管进入血管,到达血管岔口时,一只手需固定导管,防止其移动而后另一只手操控捻旋导丝的尾端,推送导丝发生一定位移,捻旋导丝发生角度旋转将导丝送到一定位置后再一只手把持导丝,防止其移动,另一只手操纵导管尾部,在导丝引导使导管产生相应的运动。施术者如此交替操控导丝和导管,导丝始终在导管前面,引导着导管前进,直到导管到达靶血管位置。到达靶血管位置后需要施术者把持着导管,缓慢撤出导丝,再从导管后端打入所需剂量栓塞剂从而达到手术需求。
2、导管和其他细长医疗装置可以被用于诊断和治疗各种血管系统疾病的微创医疗手术,包括神经血管介入(nvi)(也被称为神经介入手术)、经皮冠状动脉介入(pci)和周围血管介入(pvi)。这些手术通常包括导航导丝通过脉管系统,并且经由导丝来推进导管以进行治疗。导管插入手术首先使用标准经皮技术,通过引入器鞘进入适当的血管,诸如动脉或静脉。通过引入器鞘,鞘或引导导管之后在诊断导丝上前进到主要位置,诸如针对nvi的颈内动脉、针对pci的冠状动脉开口或针对pvi的股浅动脉。之后适于脉管系统的导丝被导航穿过鞘或引导导管到脉管系统中的目标位置。
3、已经研发了基于机器人导管的手术系统,其可以被用于辅助医生执行导管插入手术,诸如nvi、pci和pvi。nvi程序的示例包括动脉瘤的线圈栓塞、动静脉畸形的液体栓塞和急性缺血性卒中大血管闭塞的机械血栓切除术。在nvi手术中,医生使用机器人系统通过控制神经血管导丝和微导管的操纵来获得目标病变通路,从而提供治疗以恢复正常血流。目标通路通过鞘或引导导管来获得,不过也会需要中间导管可以用于更远侧区域或为微导管和导丝提供适度支撑。根据病变和治疗类型,导丝的远侧尖端被导航到病变中或经过病变。例如为了治疗动脉瘤,将微导管推进到病变中,然后移除导丝,再将阻断血流进入动脉瘤的器械通过微导管部署到动脉瘤中。故在移除导丝时,要对输送导丝的机构对导丝进行释放,使导丝保持静止状态,方便移除导丝,更换其他医疗器械。
技术实现思路
0、
技术实现要素:
1、本实用新型的目的在于克服上述现有技术的不足,提供一种用于经皮介入装置更换的离合装置及机器人系统,通过增加离合机构使传动机构和输送齿轮分离,其旨在解决现有技术中输送齿轮转动过程中经皮介入装置始终前进或后退的技术问题。
2、为实现上述目的,本实用新型提出了一种用于经皮介入装置更换的离合装置,包括输送本体;输送齿轮可转动安装在所述输送本体的一侧,所述旋转齿轮和所述输送齿轮被开口轴向贯穿,导丝通过所述开口卡入;所述输送本体上设有由所述输送齿轮带动的输送机构,所述输送齿轮通过一传动机构带动所述输送机构输送导丝,所述传动机构包括一在升降过程中可脱离所述输送齿轮的离合机构。
3、作为优选,所述输送机构包括由所述输送齿轮带动的主动齿轮、由所述主动齿轮带动的驱动硅胶滚轮和与所述驱动硅胶滚轮对应的压紧硅胶滚轮;所述主动齿轮和所述输送齿轮之间设有一传动机构。
4、作为优选,所述输送齿轮靠近所述输送本体的一端连接有所述传动机构。
5、作为优选,所述传动机构还包括一借斜齿轮和与所述借斜齿轮同轴安装的主动圆柱齿轮所述主动圆柱齿轮带动所述主动齿轮转动。
6、作为优选,所述离合机构包括与所述借斜齿轮卡接的离合凸块、用于安装所述离合凸块的顶杆。
7、作为优选,所述顶杆为所述离合凸块的中心轴,所述顶杆上同轴连接有所述借斜齿轮和所述主动圆柱齿轮。
8、作为优选,所述离合凸块包括圆盘和设置在所述圆盘底部的凸肩;所述借斜齿轮上设有与所述凸肩相配合的凹槽。
9、作为优选,所述借斜齿轮可转动连接在一安装座上,所述安装座安装在所述输送本体上。
10、作为优选,所述离合凸块设置在所述借斜齿轮和所述主动圆柱齿轮之间,所述主动圆柱齿轮与所述输送本体之间设有弹簧。
11、作为优选,在所述离合机构上连接有离合驱动机构,所述离合驱动机构包括第一电机、安装在所述第一电机上的曲柄、安装在所述曲柄上的滑块、设置在所述滑块的升降槽和沿着所述升降槽升降的升降推杆,所述升降推杆控制所述离合机构的离合。
12、作为优选,所述曲柄为l形曲柄,所述曲柄靠近所述第一电机的一侧设有移动槽。
13、作为优选,所述第一电机上设有转盘,在所述转盘上偏心设有移动轴,所述移动轴在所述移动槽内移动。
14、作为优选,所述滑块和所述曲柄之间还设有一导向板。
15、为实现上述目的,本实用新型提出了一种机器人系统,使用了上述的用于导丝更换的离合装置。
16、与现有技术相比,本实用新型提供的一种用于经皮介入装置(如导丝、导管等)更换的离合装置及机器人系统的有益效果为:
17、1、输送齿轮带动输送本体输送导丝,导丝通过开口卡入输送本体和输送齿轮中,在输送过程中输送齿轮一直旋转,输送齿轮的开口和输送本体的开口分离。在需要移除导丝的时候,通过离合机构使传动机构和输送齿轮分离,在输送齿轮继续转动的过程中,输送导丝不会前进或后退。
18、2、弹簧使借斜齿轮和主动圆柱齿轮处于卡合状态,输送齿轮转动过程中可以输送导丝。当顶杆被顶起的时候,借斜齿轮和主动圆柱齿轮分离,借斜齿轮转动过程中,主动圆柱齿轮不动。
19、3、第一电机带动曲柄转动,曲柄带动滑块径向移动来带动顶杆的上下运动,从而控制离合机构的状态。
20、本实用新型的特征及优点将通过实施例结合附图进行详细说明。
技术特征:
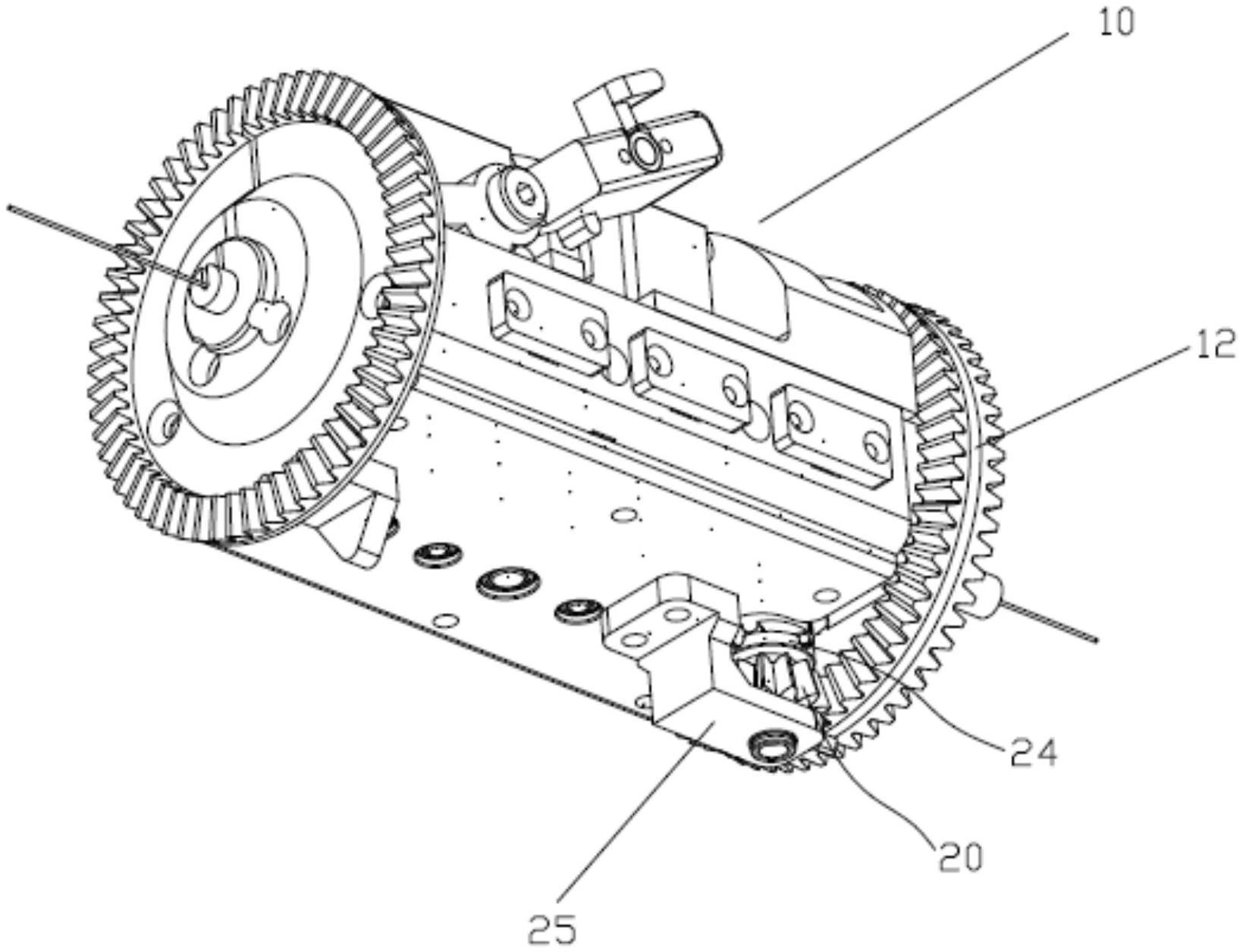
1.一种用于经皮介入装置更换的离合装置,包括输送本体(10);其特征在于:输送齿轮(12)可转动安装在所述输送本体(10)的一侧,所述输送本体(10)和所述输送齿轮(12)被开口(13)轴向贯穿,经皮介入装置通过所述开口(13)卡入;所述输送本体(10)上设有由所述输送齿轮(12)带动的输送机构(14),所述输送齿轮(12)通过一传动机构(20)带动所述输送机构(14)输送经皮介入装置,所述传动机构(20)包括一在升降过程中可脱离所述输送齿轮(12)的离合机构(24)。
2.如权利要求1所述的一种用于经皮介入装置更换的离合装置,其特征在于:所述输送机构(14)包括由所述输送齿轮(12)带动的主动齿轮(15)、由所述主动齿轮(15)带动的驱动硅胶滚轮(16)和与所述驱动硅胶滚轮(16)对应的压紧硅胶滚轮(17);所述主动齿轮(15)和所述输送齿轮(12)之间设有一传动机构(20)。
3.如权利要求1所述的一种用于经皮介入装置更换的离合装置,其特征在于:所述输送齿轮(12)靠近所述输送本体(10)的一端连接有所述传动机构(20)。
4.如权利要求2所述的一种用于经皮介入装置更换的离合装置,其特征在于:所述传动机构(20)还包括一借斜齿轮(21)和与所述借斜齿轮(21)同轴安装的主动圆柱齿轮(22)所述主动圆柱齿轮(22)带动所述主动齿轮(15)转动。
5.如权利要求4所述的一种用于经皮介入装置更换的离合装置,其特征在于:所述离合机构(24)包括与所述借斜齿轮(21)卡接的离合凸块(241)、用于安装所述离合凸块(241)的顶杆(242)。
6.如权利要求5所述的一种用于经皮介入装置更换的离合装置,其特征在于:所述顶杆(242)为所述离合凸块(241)的中心轴,所述顶杆(242)上同轴连接有所述借斜齿轮(21)和所述主动圆柱齿轮(22)。
7.如权利要求5所述的一种用于经皮介入装置更换的离合装置,其特征在于:所述离合凸块(241)包括圆盘(243)和设置在所述圆盘(243)底部的凸肩(244);所述借斜齿轮(21)上设有与所述凸肩(244)相配合的凹槽(245)。
8.如权利要求4所述的一种用于经皮介入装置更换的离合装置,其特征在于:所述借斜齿轮(21)可转动连接在一安装座(25)上,所述安装座(25)安装在所述输送本体(10)上。
9.如权利要求5所述的一种用于经皮介入装置更换的离合装置,其特征在于:所述离合凸块(241)设置在所述借斜齿轮(21)和所述主动圆柱齿轮(22)之间,所述主动圆柱齿轮(22)与所述输送本体之间设有弹簧。
10.如权利要求1所述的一种用于经皮介入装置更换的离合装置,其特征在于:在所述离合机构(24)上连接有离合驱动机构(26),所述离合驱动机构(26)包括第一电机(261)、安装在所述第一电机(261)上的曲柄(262)、安装在所述曲柄(262)上的滑块(263)、设置在所述滑块(263)的升降槽(264)和沿着所述升降槽(264)升降的升降推杆(265),所述升降推杆(265)控制所述离合机构(24)的离合。
11.如权利要求10所述的一种用于经皮介入装置更换的离合装置,其特征在于:所述曲柄(262)为l形曲柄,所述曲柄(262)靠近所述第一电机(261)的一侧设有移动槽(266)。
12.如权利要求11所述的一种用于经皮介入装置更换的离合装置,其特征在于:所述第一电机(261)上设有转盘(267),在所述转盘(267)上偏心设有移动轴(268),所述移动轴(268)在所述移动槽(266)内移动。
13.如权利要求12所述的一种用于经皮介入装置更换的离合装置,其特征在于:所述滑块(263)和所述曲柄(262)之间还设有一导向板(269)。
14.一种机器人系统,其特征在于:使用了如权利要求1-13任一项所述的用于经皮介入装置更换的离合装置。
技术总结
本技术适用于机器人辅助装置的技术领域,公开了一种用于经皮介入装置更换的离合装置及机器人系统。本技术提供的一种用于经皮介入装置更换的离合装置,包括输送本体;输送齿轮可转动安装在所述输送本体的一侧,所述旋转齿轮和所述输送齿轮被开口轴向贯穿,经皮介入装置通过所述开口卡入;所述输送本体上设有由所述输送齿轮带动的输送机构,所述输送齿轮通过一传动机构带动所述输送机构输送经皮介入装置,所述传动机构包括一在升降过程中可脱离所述输送齿轮的离合机构。解决现有技术中输送齿轮转动过程中经皮介入装置始终前进或后退的技术问题。
技术研发人员:马晓峰,孙冰,刘振全,贾晶
受保护的技术使用者:上海暖阳医疗器械有限公司
技术研发日:20220930
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!