一种三自由度脚踝康复训练机器人
本技术属于康复训练装置的,具体涉及一种三自由度脚踝康复训练机器人。
背景技术:
1、脚踝对人体十分重要,由于足踝处于人体最下端,整个身体的重量和压力都会放在足踝的肌肉上,由足踝支撑起身体,承受全身的重量。在足踝受伤后如果不能得到很好的康复治疗容易留下后遗症,康复治疗时常使用康复设备,患者借助设备,在医生和康复师的指导下进行一些简单的动作。现有的脚踝康复机器人种类很多,有类似于跑步机样式的运动平台,也有基于stewart平台改进的结构,但由于运动平台的尺寸比较大,质量也不轻,在运输和转移时不太方便,且存在损伤机构的可能性。而传统的六自由度平台因为结构相对复杂,质量较大同样存在不够便携的特点,在康复运动初期不能追踪运动轨迹,记录运动数据,推杆施加力时没有缓冲的空间,容易产生二次损伤,且以上两种康复机构都不便宜,对于医院和患者来说无疑是一个沉重的负担。
技术实现思路
1、本实用新型提供一种三自由度脚踝康复训练机器人,借助立柱式直线导轨结构的牵引机构自主带动康复训练者的脚部做背伸、跖屈、外翻和内翻训练,利用旋转平台自主带动康复训练者的脚部做外展和内收训练,集多种脚踝康复训练运动与一体,同时整个康复训练机器人的结构简单,制作方便,成本低廉,便于推广应用,解决了现有康复训练机器人结构复杂、价格昂贵等技术问题。
2、本实用新型可通过以下技术方案实现:
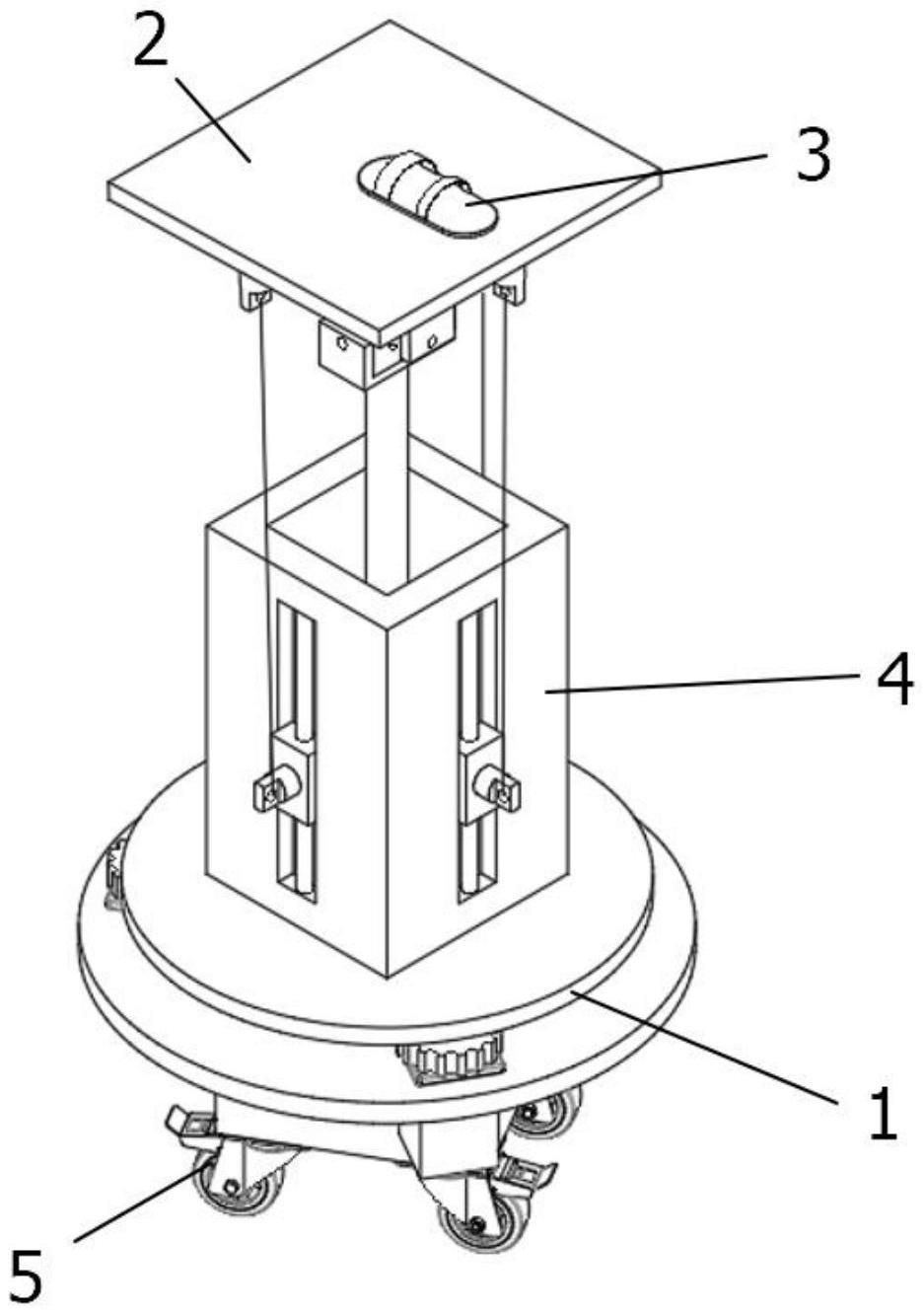
3、一种三自由度脚踝康复训练机器人,包括旋转平台,在所述旋转平台的上方设置有工作台,在所述工作台的表面设置有脚部固定件,其底部通过牵引机构与旋转平台相连,
4、所述牵引机构包括平行间隔、垂直设置的四个直线模组,每个所述直线模组的滑块均通过各自的牵引绳与工作台的四个不同位置连接,用于实现工作台连同脚部固定件绕x轴方向、y轴方向上下转动,从而自主带动康复训练者的脚部做背伸、跖屈、外翻和内翻训练;
5、所述旋转平台用于实现工作台连同脚部固定件绕z轴方向转动,从而自主带动康复训练者的脚部做外展和内收训练。
6、进一步,所述牵引机构包括支撑杆,在所述支撑杆的四周均匀间隔设置有四个直线模组,其顶部通过虎克较与工作台底部转动连接,
7、四个所述直线模组的中心点的对角连线、虎克铰的两个转动轴所在的轴向中心线分别与x轴方向、y轴方向平行;
8、记与x轴方向平行的对角连线上的两个直线模组分别第一直线模组、第二直线模组,记与y轴方向平行的对角连线上的两个直线模组分别第三直线模组、第四直线模组,
9、所述第一直线模组带动对应的滑块沿z轴方向向上或者向下运动,同时第二直线模组带动对应的滑块沿沿z轴方向向下或者向上运动,实现工作台连同脚部固定件绕x轴方向上下转动;
10、所述第二直线模组带动对应的滑块沿z轴方向向上或者向下运动,同时第二直线模组带动对应的滑块沿沿z轴方向向下或者向上运动,实现工作台连同脚部固定件绕y轴方向上下转动。
11、进一步,四个所述直线模组均设置方形壳体内部,在所述方形壳体的四个侧壁对应各自直线模组的滑块位置均设置有滑槽,每个所述滑块上均设置有凸缘,所述凸缘裸露在滑槽外面,其通过牵引绳与工作台的底部连接。
12、进一步,所述旋转平台包括平行设置的转动平台和底座,在所述底座的周边位置均匀间隔设置有三个主动齿轮和多个牛眼轴承,其中心位置设置有一个从动齿轮,每个所述主动齿轮均与从动齿轮啮合,其中心轴与各自的电动机相连,
13、每个所述牛眼轴承的中心万向珠均与从动齿轮的底面接触,所述从动齿轮的顶面与转动平台连接,
14、每个所述电动机带动各自的主动齿轮转动,从而带动从动齿轮连同转动平台绕z轴方向转动。
15、进一步,在所述底座的底面设置多个移动轮。
16、进一步,所述脚部固定件能够拆卸地设置在工作台的中心上,其长度方向与x轴方向或者y轴方向平行。
17、本实用新型有益的技术效果如下:
18、1.本实用新型提供的三自由度并联脚踝康复机器人,其平台能够做旋转、倾侧和俯仰运动,可较好实现脚踝的背伸、跖屈、内翻、外翻、旋转等动作,帮助病人康复脚踝。
19、2.本实用新型结构简单,便于安装和移动,且结构紧凑适用于各种场合,造价也不高有利于大批量推广。
20、3.本实用新型所涉及到的运动副较少,有利于减少控制的复杂性。由于牵引绳允许腿的长度变化大,所以有较大的工作空间,且减少了腿间干涉,同时牵引绳的移动质量小,与用户的相互作用低,不会产生较大的力,这对预防脚踝的二次损伤很有帮助。
技术特征:
1.一种三自由度脚踝康复训练机器人,其特征在于:包括旋转平台,在所述旋转平台的上方设置有工作台,在所述工作台的表面设置有脚部固定件,其底部通过牵引机构与旋转平台相连,
2.根据权利要求1所述的三自由度脚踝康复训练机器人,其特征在于:所述牵引机构包括支撑杆,在所述支撑杆的四周均匀间隔设置有四个直线模组,其顶部通过虎克较与工作台底部转动连接,
3.根据权利要求2所述的三自由度脚踝康复训练机器人,其特征在于:四个所述直线模组均设置方形壳体内部,在所述方形壳体的四个侧壁对应各自直线模组的滑块位置均设置有滑槽,每个所述滑块上均设置有凸缘,所述凸缘裸露在滑槽外面,其通过牵引绳与工作台的底部连接。
4.根据权利要求1所述的三自由度脚踝康复训练机器人,其特征在于:所述旋转平台包括平行设置的转动平台和底座,在所述底座的周边位置均匀间隔设置有三个主动齿轮和多个牛眼轴承,其中心位置设置有一个从动齿轮,每个所述主动齿轮均与从动齿轮啮合,其中心轴与各自的电动机相连,
5.根据权利要求4所述的三自由度脚踝康复训练机器人,其特征在于:在所述底座的底面设置多个移动轮。
6.根据权利要求1所述的三自由度脚踝康复训练机器人,其特征在于:所述脚部固定件能够拆卸地设置在工作台的中心上,其长度方向与x轴方向或者y轴方向平行。
技术总结
本技术属于康复训练装置的技术领域,公开了一种三自由度脚踝康复训练机器人,包括旋转平台,在所述旋转平台的上方设置有工作台,在所述工作台的表面设置有脚部固定件,其底部通过牵引机构与旋转平台相连,所述牵引机构包括平行间隔、垂直设置的四个直线模组,每个所述直线模组的滑块均通过各自的牵引绳与工作台的四个不同位置连接,用于实现工作台连同脚部固定件绕X轴方向、Y轴方向上下转动,从而自主带动康复训练者的脚部做背伸、跖屈、外翻和内翻训练;所述旋转平台用于实现工作台连同脚部固定件绕Z轴方向转动,从而自主带动康复训练者的脚部做外展和内收训练。整个康复训练机器人的结构简单,制作方便,成本低廉,便于推广应用。
技术研发人员:胡永利,钱青
受保护的技术使用者:上海海事大学
技术研发日:20221026
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!