一种左右手交换机构及其上肢外骨骼康复机器人
本技术涉及医疗康复机械设备,特别是涉及一种左右手交换机构及其上肢外骨骼康复机器人。
背景技术:
1、随着中国城市化的发展、老龄化的加剧,脑卒中发病率呈现爆炸性上升趋势。虽然现代医学有效地降低了脑卒中疾病的死亡率,但是仍然无法避免患者会出现不同程度的运动、认知、言语、吞咽等方面的功能障碍,这些后遗症严重影响患者的日常生活质量。尤其是日常生活中绝大部分复杂精细的活动都需要使用上肢完成,上肢活动能力受损将极大地降低患者的生活质量。
2、外骨骼康复机器人是将康复医学、人工智能、控制技术等融合起来的一种新型康复机械装置,在康复中使用外骨骼机器人装置能够对患者训练的关节进行精准的运动控制,将治疗效果量化,为医生治疗方案的调整提供可靠的训练数据,整体提高康复治疗效果。
3、目前,外骨骼机器人主要为手部或肘部单一关节类型,无法满足偏瘫患者复杂多变的康复需求。申请公布号为cn105662783a的中国专利公开了一种外骨骼式上肢康复训练机器人,包括基座、机械肩胛带组件、机械肩关节组件、机械肘关节组件、机械前臂组件、机械腕关节组件、机械手部组件及电机驱动组件;基座支撑整个外骨骼式上肢康复训练机器人,机械肩胛带组件与基座连接,机械肩关节组件与机械肩胛带组件连接,机械肘关节组件与机械肩关节组件连接,机械前臂组件与机械肘关节组件连接,机械腕关节组件与机械前臂组件连接,机械手部组件与机械腕关节组件连接,电机驱动组件作为整个外骨骼式上肢康复训练机器人的动力源。该方案前臂采用了二段四连杆机构实现了肘的旋内、旋外自由度,通过电机驱动实现了肘屈伸自由度,但是由于左右手肘关节屈伸动作相反,该方案只能单手适用,无法满足左右手互换。再如,授权公告号为cn101357097b的中国专利公开了一种五自由度外骨骼式上肢康复机器人,包括安装机器人的安装架,安装架设计有导轨,导轨上安装升降架,升降架上带有高度调节机构,可旋转安装臂通过旋转轴安装在升降架上,由横肩、上臂、前臂和手柄构成的康复机械臂本体安装在可旋转安装臂上,5个自由度关节,5个驱动电机分别安装在各个关节的转动轴线上,与驱动电机级联的四个力矩传感器分别安装在肩部、肘部及腕部,其中肩部两个、肘部一个、腕部屈伸处一个,力矩传感器作为传动装置及检测装置连接电机减速器与执行机构。该方案通过5个自由度关节,提供患者各关节的单关节运动与三维空间多关节复合运动,但该方案同样未公开如何左右手同时适用,如何实现左右手互换。
技术实现思路
1、本实用新型的目的是提供一种左右手交换机构及其上肢外骨骼康复机器人,以解决上述现有技术存在的问题,通过将肘部支撑件、第一前臂连接件和第二前臂连接件顺次首尾转动连接,在分别驱动第一前臂连接件和第二前臂连接件转动时能够实现左右手的交换,从而能够通过一套机构实现两种用途,满足不同患者对于左手或右手康复训练的需求。
2、为实现上述目的,本实用新型提供了如下方案:
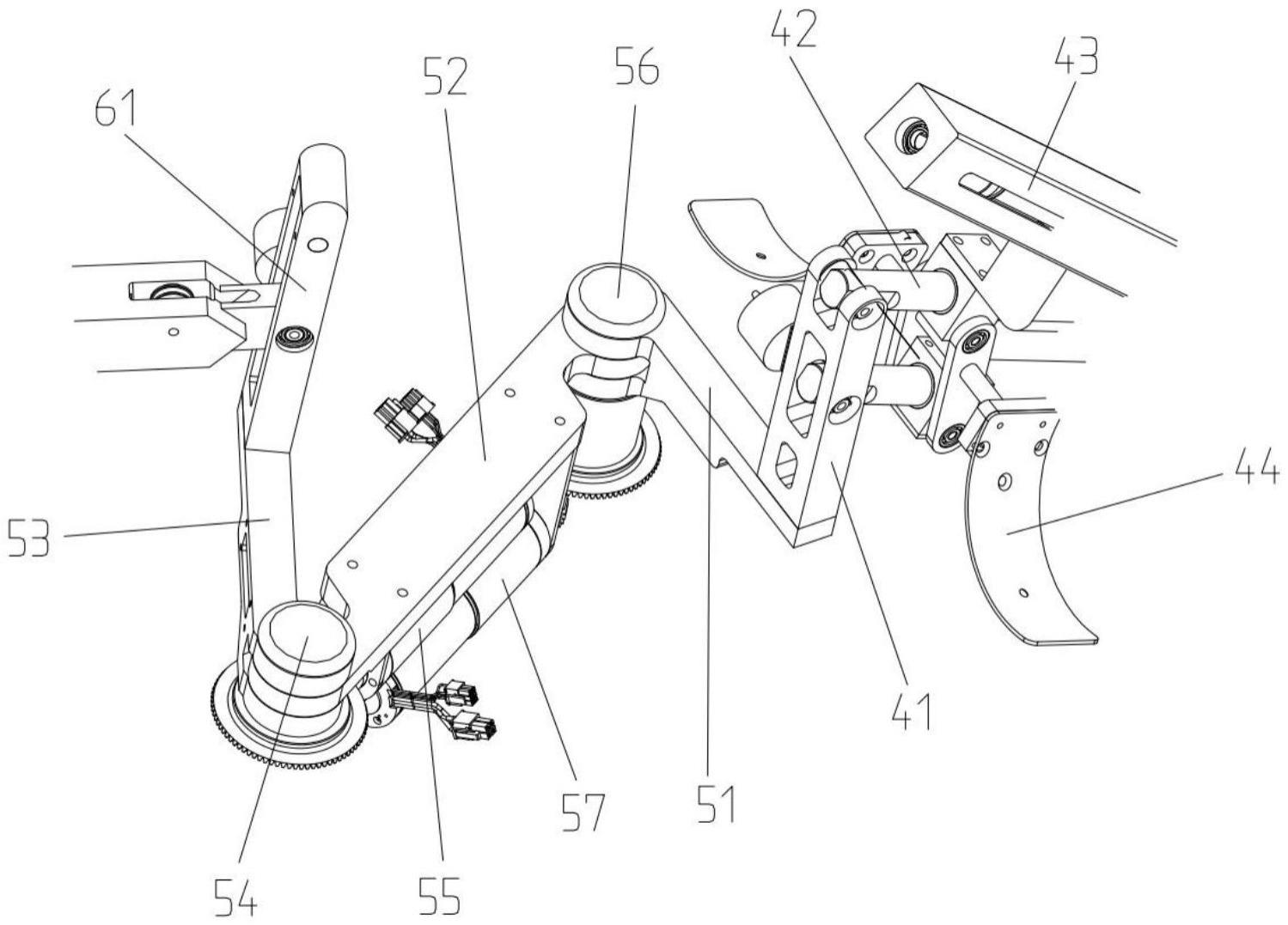
3、本实用新型提供一种左右手交换机构,包括肘部支撑件、第一前臂连接件和第二前臂连接件,所述肘部支撑件、所述第一前臂连接件和所述第二前臂连接件顺次首尾转动连接,所述肘部支撑件用于连接上臂组件,所述第二前臂连接件用于连接前臂组件;所述肘部支撑件与所述第一前臂连接件转动连接处设置有第一肘关节组件,所述第一肘关节组件用于驱动所述第一前臂连接件转动,此时,所述第一前臂连接件与所述第二前臂连接件重叠;所述第一前臂连接件与所述第二前臂连接件处设置有第二肘关节组件,所述第二肘关节组件用于驱动所述第二前臂连接件转动,此时,所述肘部支撑件与所述第一前臂连接件重叠。
4、优选地,所述第一肘关节组件包括固定在所述第一前臂连接件上的第一电机和固定在所述肘部支撑件上的第一转轴,所述第一电机与所述第一转轴驱动连接;所述第二肘关节组件包括固定在所述第一前臂连接件上的第二电机和固定在所述第二前臂连接件上的第二转轴,所述第二电机与所述第二转轴驱动连接。
5、优选地,所述第一电机的主轴连接有第一锥齿轮,所述第一转轴连接有第二锥齿轮,所述第一锥齿轮与所述第二锥齿轮啮合连接;所述第二电机的主轴连接有第三锥齿轮,所述第二转轴连接有第四锥齿轮,所述第三锥齿轮与所述第四锥齿轮啮合连接。
6、优选地,所述第一电机与所述第二电机上下平行布置,且均与所述第一前臂连接件平行,所述肘部支撑件和所述第二前臂连接件的长度相等且为所述第一前臂连接件的一半。
7、本实用新型还提供一种上肢外骨骼康复机器人,包括顺次连接的肩关节组件、上臂组件、如前文记载的所述的左右手交换机构、前臂组件以及腕关节组件,所述左右手交换机构的肘部支撑件与所述上臂组件连接,所述左右手交换机构的第二前臂连接件与所述前臂组件连接,所述肩关节组件通过机械臂悬挂机构滑动连接在滑轨装置上。
8、优选地,所述肩关节组件包括竖向设置的肩关节外展内收电机,所述肩关节外展内收电机的主轴上安装有第一竖向支撑件,所述第一竖向支撑件上设置有肩关节上抬下压电机和第三转轴,所述第三转轴与所述上臂组件固定连接,所述肩关节上抬下压电机的主轴垂直于所述第三转轴,并通过锥齿轮驱动所述第三转轴转动。
9、优选地,所述上臂组件包括第二竖向支撑件和平行设置的上臂连杆,所述上臂连杆的一端均与所述第一竖向支撑件转动连接,所述上臂连杆的另一端均与所述第二竖向支撑件转动连接,其中一所述上臂连杆的一端与所述第三转轴固定连接,所述第二竖向支撑件与所述肘部支撑件固定连接。
10、优选地,所述前臂组件包括长度调节装置,所述长度调节装置包括与所述第二前臂连接件连接的滑轨、滑动连接在所述滑轨上的滑板以及锁紧所述滑板的锁紧结构,所述滑板连接有所述腕关节组件。
11、优选地,所述腕关节组件包括前臂连杆、转动设置在所述前臂连杆上的前臂传动件以及驱动所述前臂传动件转动的腕关节旋内旋外电机,所述前臂传动件上设置有手柄。
12、优选地,所述前臂传动件上设置有以其转动中心为圆心的弧形限位孔,所述前臂连杆上设置有限位杆,所述弧形限位孔套设在所述限位杆上。
13、本实用新型相对于现有技术取得了以下技术效果:
14、(1)本实用新型通过将肘部支撑件、第一前臂连接件和第二前臂连接件顺次首尾转动连接,在驱动第一前臂连接件转动时,保持第一前臂连接件和第二前臂连接件重叠,此时能够实现左(右)手的肘关节动作,在驱动第二前臂连接件动作时,保持肘部支撑件和第一前臂连接件重叠,此时能够实现右(左)手的肘关节动作,从而能够实现左右手的交换,通过一套机构实现两种用途,满足不同患者对于左手或右手康复训练的需求;
15、(2)本实用新型用于驱动第一肘关节转动的第一电机以及用于驱动第二肘关节转动的第二电机均设置在第一前臂连接件上,能够利用第一前臂连接件作为固定部,保持左右手交换时动作的稳定性,同时,肘部支撑件和第二前臂连接件的长度相等且为第一前臂连接件的一半,在进行第一肘关节(第二肘关节)动作时,能够保持其转动中心位于第一前臂连接件的端部,能够适应患者肘关节处上臂和前臂的实际位置关系,保证在符合人体结构的基础上进行康复训练;
16、(3)本实用新型通过平行设置的上臂连杆连接第一竖向支撑件和第二竖向支撑件,能够形成四连杆结构,保持第一竖向支撑件和第二竖向支撑件始终处于平行且竖向的位置状态,在进行上臂上抬下压动作时,能够保持左右手交换机构始终处于稳定的水平状态,满足各关节独立动作的需求,且双上臂连杆的结构能够提高上臂组件的承载能力,保证整体结构的稳定性;
17、(4)本实用新型在前臂传动件上设置有以其转动中心为圆心的弧形限位孔,在前臂连杆上设置有限位杆,利用弧形限位孔和限位杆能够限定前臂传动件的转动位置,使得腕关节处于可控的转动范围之内,保证患者康复锻炼时的安全性,避免对人体关节造成伤害。
- 还没有人留言评论。精彩留言会获得点赞!