一种腹腔镜手术机器人用戳卡机构及腹腔镜手术机器人的制作方法
本技术涉及医疗器械,具体而言,涉及一种腹腔镜手术机器人用戳卡机构及腹腔镜手术机器人。
背景技术:
1、近年来微创手术以其优异的医疗效果,逐渐被人们接受,将微创手术技术与机器人技术相结合,弥补了传统微创手术存在的不足,加快了微创手术的进化,腹腔镜手术机器人技术已经成为当前机器人领域的研究热点,其中戳卡机构是腹腔镜手术机器人中最重要的组成部分之一。
2、现有腹腔镜手术机器人用戳卡机构为c型臂结构,在安装鞘管时首先需要按动解锁按钮,将c型臂张开,然后将鞘管对准c型口并将其放入c型臂内,最后用另一只手掰动c型臂将鞘管锁紧。但是,在鞘管对准c型口的过程中,受医护人员技能水平的影响,若鞘管与c型臂对准位置不准确,使得鞘管与c型臂之间出现机械卡死等情况的发生,导向鞘管的拆装效率低。
技术实现思路
1、本实用新型解决的问题是:如何提高鞘管拆装效率的问题。
2、为解决上述问题,第一方面,本实用新型提供一种腹腔镜手术机器人用戳卡机构,包括壳体,所述壳体内设置有把手、活动架、导向箱体、滑块和弹簧,所述壳体用于与c型臂连接并设置有插口,所述插口用于鞘管插入所述壳体内,所述导向箱体设置有滑槽,所述滑槽与所述插口相对设置,所述活动架移动设置在所述插口与所述滑槽之间,所述滑块分别与所述活动架和所述滑槽滑动连接,所述活动架的顶部设置有凸台,所述滑块朝向所述插口的一端与所述凸台抵接,所述凸台用于与所述鞘管插接,所述活动架的移动方向与所述滑块的滑动方向相垂直设置,所述第一弹簧用于以伸长状态设置在所述滑块和所述滑槽之间,所述把手位于所述壳体内并与所述导向箱体铰接,且所述把手的一端与所述活动架的下端抵接,另一端从所述壳体内伸出设置。
3、可选地,所述导向箱体上设置有用于与腹腔镜手术机器人控制系统通信连接的碰撞开关,所述活动架上设置有延伸台,所述活动架用于与所述鞘管插接时,所述延伸台与所述碰撞开关抵接。
4、可选地,所述壳体设置有鞘管导向套,所述鞘管导向套上设置有所述插口,所述插口的上方设置有平台,所述活动架上设置有延伸部,所述平台与所述延伸部之间设置有复位弹簧。
5、可选地,所述腹腔镜手术机器人用戳卡机构还包括导向杆,所述复位弹簧套设在所述导向杆上,所述导向杆贯穿所述平台和所述延伸部并与所述把手朝向所述插口的一端滑动连接。
6、可选地,所述滑块背离所述插口的一端设置有滑杆,所述滑杆与所述导向箱体滑动连接,所述弹簧套设在所述滑杆上。
7、可选地,所述鞘管导向套上设置有两个限位壁,两个限位壁相对设置并均用于与所述鞘管滑动连接。
8、可选地,所述活动架上设置有两个容置腔,所述凸台设置在两个所述容置腔之间,两个所述容置腔的形状分别与所述两个限位壁的形状相适配设置。
9、可选地,所述腹腔镜手术机器人用戳卡机构包括按钮和弹簧,所述按钮设置在所述把手从所述壳体内伸出的一端,所述弹簧的一端设置在所述按钮上,另一端朝向所述壳体内部延伸设置。
10、可选地,所述壳体上设置有指示灯,所述指示灯与所述碰撞开关通信连接。
11、与现有技术相比,本实用新型中的腹腔镜手术机器人用戳卡机构通过壳体与c型臂连接后,使得壳体上的插口处与稳定状态,以使得插口对鞘管提供安装导向,并在壳体内与插口相对的位置设置有导向箱体,而滑槽与插口相对设置,且滑块与滑槽滑动连接,使得鞘管从而插口插入壳体后,鞘管的前端可推动滑块在滑槽作远离插口的滑动,而滑动架移动设置在插口与滑槽之间,且活动架顶部的凸台与滑块朝向插口的一端向抵接,第一弹簧以伸长状态设置在滑块和滑槽之间,在鞘管未插入插口时,凸台限制滑块在第一弹簧的作用下移动,从而滑块、活动架及凸台形成自锁结构,而在鞘管插入插口时,滑块在鞘管推动下从活动架的顶部逐渐滑入滑槽内后,滑块与凸台和活动架的顶部均未接触,且第一弹簧被压缩,从而活动架可在自身重力的作用下作与滑块的滑动方向相垂直的直线移动,并通过凸台与鞘管插接以限制鞘管的移动,使得鞘管保持稳定,从而完成鞘管的安装;而在鞘管从壳体上拆除时,医护人员可单手对把手从壳体伸出的一端施加驱动力,在该驱动力的作用下,把手在壳体内作顺时针转动,把手与活动架的下端向抵接的一端将活动架抬起,以解除凸台与鞘管之间的连接,而滑块在第一弹簧的回复作用下将鞘管的连接端推出壳体内,完成鞘管的拆卸,从而鞘管的安装过程中仅需医护人员单手操作即可,进而提高鞘管拆装效率。
12、第二方面,本实用新型还提供一种腹腔镜手术机器人,包括如前所述的腹腔镜手术机器人用戳卡机构。
13、该腹腔镜手术机器人相对于现有技术的优势与该腹腔镜手术机器人用戳卡机构相同,此处不作赘述。
技术特征:
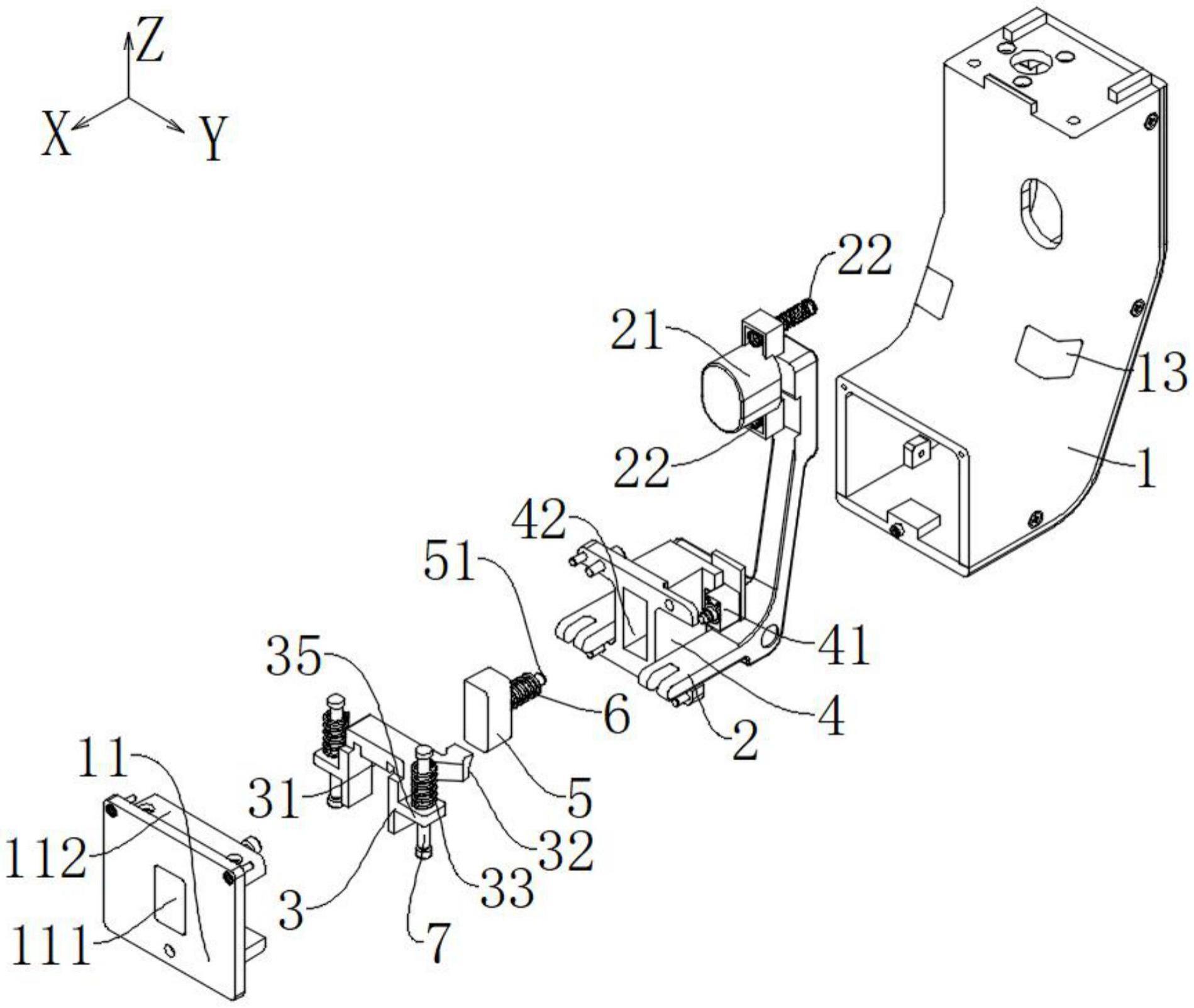
1.一种腹腔镜手术机器人用戳卡机构,其特征在于,包括壳体(1),所述壳体(1)内设置有把手(2)、活动架(3)、导向箱体(4)、滑块(5)和第一弹簧(6),所述壳体(1)用于与c型臂连接并设置有插口(111),所述插口(111)用于鞘管(10)插入所述壳体(1)内,所述导向箱体(4)设置有滑槽(42),所述滑槽(42)与所述插口相对设置,所述活动架(3)移动设置在所述插口(111)与所述滑槽(42)之间,所述滑块(5)分别与所述活动架(3)和所述滑槽(42)滑动连接,所述活动架(3)的顶部设置有凸台(31),所述滑块(5)朝向所述插口(111)的一端与所述凸台(31)抵接,所述凸台(31)用于与所述鞘管(10)插接,所述活动架(3)的移动方向与所述滑块(5)的滑动方向相垂直设置,所述第一弹簧(6)用于以伸长状态设置在所述滑块(5)和所述滑槽(42)之间,所述把手(2)位于所述壳体(1)内并与所述导向箱体(4)铰接,且所述把手(2)的一端与所述活动架(3)的下端抵接,另一端从所述壳体(1)内伸出设置。
2.根据权利要求1所述的腹腔镜手术机器人用戳卡机构,其特征在于,所述导向箱体(4)上设置有用于与腹腔镜手术机器人控制系统通信连接的碰撞开关(41),所述活动架(3)上设置有延伸台(32),所述活动架(3)用于与所述鞘管(10)插接时,所述延伸台(32)与所述碰撞开关(41)抵接。
3.根据权利要求1所述的腹腔镜手术机器人用戳卡机构,其特征在于,所述壳体(1)设置有鞘管导向套(11),所述鞘管导向套(11)上设置有所述插口(111),所述插口(111)的上方设置有平台(112),所述活动架(3)上设置有延伸部(35),所述平台(112)与所述延伸部(35)之间设置有复位弹簧(33)。
4.根据权利要求3所述的腹腔镜手术机器人用戳卡机构,其特征在于,还包括导向杆(7),所述复位弹簧(33)套设在所述导向杆(7)上,所述导向杆(7)贯穿所述平台(112)和所述延伸部(35)并与所述把手(2)朝向所述插口(111)的一端滑动连接。
5.根据权利要求4所述的腹腔镜手术机器人用戳卡机构,其特征在于,所述滑块(5)背离所述插口(111)的一端设置有滑杆(51),所述滑杆(51)与所述导向箱体(4)滑动连接,所述第一弹簧(6)套设在所述滑杆(51)上。
6.根据权利要求3所述的腹腔镜手术机器人用戳卡机构,其特征在于,所述鞘管导向套(11)上设置有两个限位壁(12),两个限位壁(12)相对设置并均用于与所述鞘管(10)滑动连接。
7.根据权利要求6所述的腹腔镜手术机器人用戳卡机构,其特征在于,所述活动架(3)上设置有两个容置腔(34),所述凸台(31)设置在两个所述容置腔(34)之间,两个所述容置腔(34)的形状分别与所述两个限位壁(12)的形状相适配设置。
8.根据权利要求1所述的腹腔镜手术机器人用戳卡机构,其特征在于,包括按钮(21)和第二弹簧(22),所述按钮(21)设置在所述把手(2)从所述壳体(1)内伸出的一端,所述第二弹簧(22)的一端设置在所述按钮(21)上,另一端朝向所述壳体(1)内部延伸设置。
9.根据权利要求2所述的腹腔镜手术机器人用戳卡机构,其特征在于,所述壳体(1)上设置有指示灯(13),所述指示灯(13)与所述碰撞开关(41)通信连接。
10.一种腹腔镜手术机器人,其特征在于,包括如权利要求1至9中任意一项所述的腹腔镜手术机器人用戳卡机构。
技术总结
本技术提供了一种腹腔镜手术机器人用戳卡机构及腹腔镜手术机器人,涉及医疗器械技术领域。腹腔镜手术机器人用戳卡机构包括壳体,壳体内设置有把手、活动架、导向箱体、滑块和弹簧,滑块分别与活动架和滑槽滑动连接,活动架的顶部设置有凸台,滑块朝向插口的一端与凸台抵接,凸台用于与鞘管插接,活动架的移动方向与滑块的滑动方向相垂直设置。在鞘管插入插口时,滑块在鞘管推动下从活动架的顶部逐渐滑入滑槽内后,滑块与凸台和活动架的顶部均未接触,且第一弹簧被压缩,从而活动架可在自身重力的作用下作与滑块的滑动方向相垂直的直线移动,并通过凸台与鞘管插接以限制鞘管的移动,使得鞘管保持稳定,从而提高鞘管拆装效率。
技术研发人员:董石磊,王建国,冯海生,王晓伟,李文滨
受保护的技术使用者:哈尔滨思哲睿智能医疗设备股份有限公司
技术研发日:20221207
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!