一种手臂骨折固定装置的制作方法
本技术涉及手臂骨折治疗和复健领域,具体是一种手臂骨折固定装置。
背景技术:
1、现有技术在手臂骨折时通常采用石膏进行手臂断骨的固定,在石膏模具保护好手臂后将石膏模具的表面缠绕上医用绷带、接着使用吊带利用脖颈将手腕吊接以进行断臂的固定,实现断臂的治疗;
2、但吊带在将手腕吊接后通常还存在一定的活动空间,即患者仍可通过肘关节轻微移动断臂,易不慎造成断臂伤害、且该种情况下也不利于断臂恢复。
技术实现思路
1、本实用新型的目的在于提供一种手臂骨折固定装置,以解决上述背景技术中提出的问题。
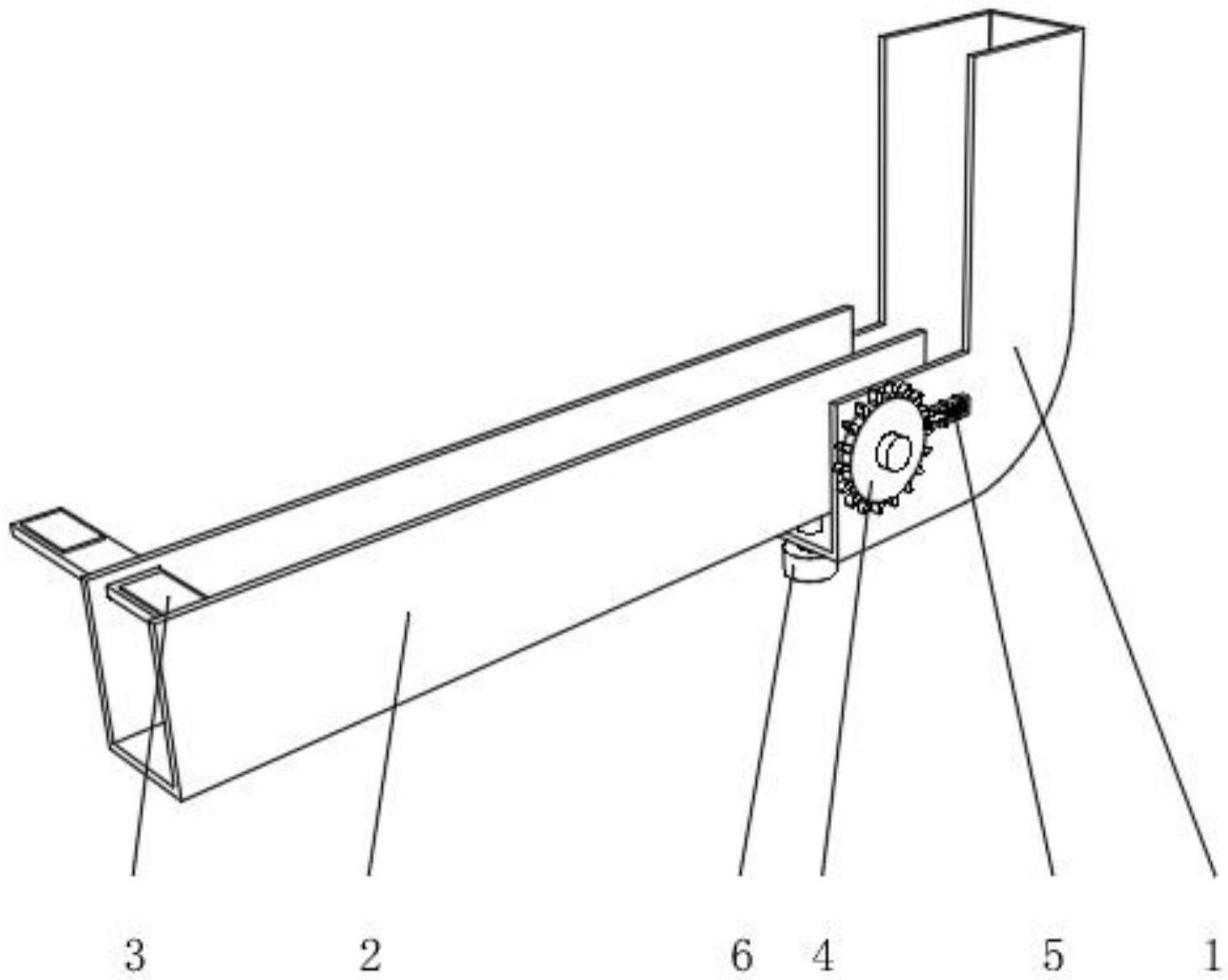
2、为实现上述目的,本实用新型提供如下技术方案:一种手臂骨折固定装置,包括大臂固定模和小臂固定模;所述小臂固定模的一侧固接有转轴,所述转轴穿出大臂固定模的一端固接有棘轮,所述大臂固定模的一侧固接有锁止机构,所述锁止机构的内部活动连接有锁止齿,所述锁止齿与棘轮活动连接。
3、作为本实用新型再进一步的方案:所述大臂固定模的内部螺合连接有螺杆,所述螺杆的一端固接有接触盘,所述接触盘与小臂固定模活动连接,所述螺杆远离接触盘的一端固接有转扭。
4、作为本实用新型再进一步的方案:所述锁止机构的内部开设有吸附区,所述吸附区的内部插接有永磁体,所述锁止齿的一侧固接有磁性块,所述磁性块与锁止机构活动连接且与永磁体相适配。
5、作为本实用新型再进一步的方案:所述锁止机构的内部固接有弹簧,所述弹簧远离锁止机构的一端与磁性块固接。
6、作为本实用新型再进一步的方案:所述小臂固定模远离大臂固定模的一端设置有束紧带。
7、作为本实用新型再进一步的方案:所述束紧带的一侧固接有魔术贴。
8、作为本实用新型再进一步的方案:所述转扭的外侧壁开设有防滑纹。
9、与现有技术相比,本实用新型的有益效果是:
10、1、当患者小臂向上移动时,锁止齿可允许棘轮转动并顺利带动转轴进行转动、实现大臂固定模和小臂固定模角度的调节;当患者小臂向下移动时,锁止齿不允许棘轮转动并顺利带动转轴进行转动,并利用螺杆固定住小臂固定模的下方,从而在患者手臂位置调节完毕后不可使患者轻微移动小臂位置,保证了小臂的稳定性,解决了患者仍可通过肘关节轻微移动断臂,易不慎造成断臂伤害、且该种情况下也不利于断臂恢复的问题;
11、2、弹簧可带动锁止齿移动,在患者康复后通过移动锁止齿将锁止齿移出棘轮的转动区域,可使大臂固定模和小臂固定模自由转动;在患者手臂骨折时,仍可通过棘轮和锁止机构进行大臂固定模与小臂固定模的固定,操作简单,装置可重复使用。
技术特征:
1.一种手臂骨折固定装置,包括大臂固定模(1)和小臂固定模(2);其特征在于:所述小臂固定模(2)的一侧固接有转轴(41),所述转轴(41)穿出大臂固定模(1)的一端固接有棘轮(4),所述大臂固定模(1)的一侧固接有锁止机构(5),所述锁止机构(5)的内部活动连接有锁止齿(51),所述锁止齿(51)与棘轮(4)活动连接。
2.根据权利要求1所述的一种手臂骨折固定装置,其特征在于,所述大臂固定模(1)的内部螺合连接有螺杆(6),所述螺杆(6)的一端固接有接触盘(62),所述接触盘(62)与小臂固定模(2)活动连接,所述螺杆(6)远离接触盘(62)的一端固接有转扭(61)。
3.根据权利要求2所述的一种手臂骨折固定装置,其特征在于,所述锁止机构(5)的内部开设有吸附区(54),所述吸附区(54)的内部插接有永磁体(55),所述锁止齿(51)的一侧固接有磁性块(52),所述磁性块(52)与锁止机构(5)活动连接且与永磁体(55)相适配。
4.根据权利要求3所述的一种手臂骨折固定装置,其特征在于,所述锁止机构(5)的内部固接有弹簧(53),所述弹簧(53)远离锁止机构(5)的一端与磁性块(52)固接。
5.根据权利要求4所述的一种手臂骨折固定装置,其特征在于,所述小臂固定模(2)远离大臂固定模(1)的一端设置有束紧带(3)。
6.根据权利要求5所述的一种手臂骨折固定装置,其特征在于,所述束紧带(3)的一侧固接有魔术贴(31)。
7.根据权利要求6所述的一种手臂骨折固定装置,其特征在于,所述转扭(61)的外侧壁开设有防滑纹。
技术总结
本技术公开了一种手臂骨折固定装置,包括大臂固定模和小臂固定模;所述小臂固定模的一侧固接有转轴,所述转轴穿出大臂固定模的一端固接有棘轮,所述大臂固定模的一侧固接有锁止机构,涉及手臂骨折治疗和复健领域。本技术当患者小臂向上移动时,锁止齿可允许棘轮转动并顺利带动转轴进行转动、实现大臂固定模和小臂固定模角度的调节;当患者小臂向下移动时,锁止齿不允许棘轮转动并顺利带动转轴进行转动,并利用螺杆固定住小臂固定模的下方,从而在患者手臂位置调节完毕后不可使患者轻微移动小臂位置,保证了小臂的稳定性,解决了患者仍可通过肘关节轻微移动断臂,易不慎造成断臂伤害、且该种情况下也不利于断臂恢复的问题。
技术研发人员:朱晟轮
受保护的技术使用者:领跋(上海)科技有限公司
技术研发日:20221219
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!