一种地面反作用力指标估算系统、地面反作用力指标估算方法以及地面反作用力指标估算程序与流程
1.本发明涉及一种地面反作用力指标估算系统、地面反作用力指标估算方法以及地面反作用力指标估算程序,尤其涉及一种利用可穿戴传感器的地面反作用力指标估算系统、地面反作用力指标估算方法以及地面反作用力指标估算程序。
背景技术:
2.从地面反作用力计算出的地面反作用力指标,被认为是表示步行和跑步期间障碍物的风险和性能的指标,所述地面反作用力是,当脚在步行或跑步着地时,脚从地面上受到的力(例如,参见非专利文献1)。作为地面反作用力指标可以列举,例如,负载速度(loading rate)、踢腿力(kicking force)、制动力冲量(braking impulse)和加速冲量(accerelation impulse)。
3.地面反作用力指标是,根据步行和跑步时的地面反作用力对地面表面的垂直分量和水平分量在一步,即,步行和跑步时从脚着地到离开地面之间的随时间的变化计算出的。负载速度是,根据地面反作用力的垂直分量中初始上升角度计算出的值,是当脚着地时脚上负载迅速程度的指标。踢腿力是地面反作用力的垂直分量中的峰值,表示踢腿所产生的力。制动力冲量是地面反作用力的后向分量的冲量,是在步行和跑步时由脚而产生的制动分量。加速冲量是地面反作用力的前向分量的冲量,是在步行和跑步时由脚而产生的加速分量。
4.地面反作用力是通过在地面上设置板状或片状地面反作用力计,在地面反作用力计上步行或跑步来测量的。在使用地面反作用力计的地面反作用力的测量中,由于地面反作用力计其本身价格昂贵,并且测量环境仅限于设置地面反作用力计的地方,因此近年来,正在开发使用廉价且小型的穿戴式传感器(例如,参见专利文献1和2)来计算地面反作用力指标的方法。
5.在专利文献2中,地面反作用力是基于与施加到安装在鞋的内侧与地面接触的部分的压力传感器的力相对应的输出值来计算的。然而,根据该方法,传感器的安装位置受到限制,并且安装在脚底的传感器难免会阻碍自然的步行或跑步动作。与此相对,在专利文献1中,作为可穿戴传感器使用了运动传感器。
6.现有技术文献
7.专利文献
8.专利文献1:日本特开2018-143412号公报
9.专利文献2:日本特开2008-298486号公报
10.非专利文献
11.非专利文献:a.a.zadpoor,等,clinical biomechanics 26,pp.23-28(2011)
技术实现要素:
12.发明要解决的技术问题
13.使用了深度学习的方法,是作为根据运动传感器获得的加速度和角速度计算出地面反作用力的主流方法,但这种方法输入变量较多,计算成本较高,因此难以搭载到计算资源有限且内置于可穿戴传感器中的计算装置中。
14.鉴于上述问题,本发明的目的在于,提供一种基于从可穿戴传感器获得的数据,以低计算成本计算出地面反作用力指标的地面反作用力指标估算系统、地面反作用力指标估算方法以及地面反作用力指标估算程序。
15.解决问题的技术手段
16.本发明的第一方面,旨在提供一种地面反作用力指标估算系统,其包括鞋、通过无线线路与鞋连接的外部装置;鞋包括:可穿戴传感器,测量三轴加速度、三轴角速度中的至少任意一种;第1存储部,预先存储了身体特征;计算部,根据可穿戴传感器的测量结果,计算出用作解释变量的值,根据可穿戴传感器的测量结果计算出的用作解释变量的值,利用多元回归分析计算出地面反作用力和地面反作用力指标;外部装置包括:第2存储部,存储了判断基准信息,所述判断基准信息是用于根据地面反作用力指标来判断用户的步行、跑步动作的信息;控制部,根据从鞋接收到的可穿戴传感器的测量结果以及计算出的地面反作用力指标和判断基准信息,对用户进行步行、跑步动作的评估;呈现部,呈现跑步动作的评估结果;在多元回归分析中,作为目标变量的地面反作用力是使用多元回归方程来计算出的,所述多元回归方程中,预先计算出了将从所述测量结果计算出的结果作为解释变量时的偏回归系数。
17.在本发明的第一方面中,根据测量结果计算出的用作解释变量的值可以是三轴加速度的波形数据的特征量、三轴角速度的波形数据的特征量中的至少任意一种。
18.在本发明的第一方面中,三轴加速度的波形数据的特征量可以包括:三轴加速度的波形数据的最大值、最小值、平均值、极大值、极小值、极大值/极小值的数量中的至少任意一种;三轴角速度的波形数据的特征量可以包括:三轴角速度的波形数据的最大值、最小值、平均值、极大值、极小值、极大值/极小值的数量中的至少任意一种。
19.在本发明的第一方面中,根据测量结果计算出的用作解释变量的值还包括:步速(步调,cadence)、步行或跑步速度(速度,speed)、脚落地时的角度(走向角,strike angle)、脚的速度(velocity)、步行或跑步时脚的高度(foot height)、脚的位置(distance)中的至少任意一种。
20.在本发明的第一方面中,根据测量结果计算出的用作解释变量的值可以包括身体特征量。
21.在本发明的第一方面中,身体特征量可以包括:用户的身高、体重、脚长中的至少任意一个。
22.在本发明的第一方面中,根据测量结果计算出的用作解释变量的值可以包括步行/跑步条件。
23.在本发明的第一方面中,步行/跑步条件可以包括:地面的倾斜角度、地面材料的硬度、地面材料的摩擦系数、鞋材料的硬度、鞋材料的摩擦系数中的至少任意一种。
24.在本发明的第一方面中,外部装置还可以包括输入部,身体特征量从输入部输入,
并从外部装置发送到鞋。
25.在本发明的第一方面中,外部装置还可以包括输入部,步行/跑步条件从输入部输入,并从外部装置发送到鞋。
26.在本发明的第一方面中,第2存储部可以存储地面反作用力指标、测量结果以及地面反作用力指标与测量结果各自的随时间的变化。
27.本发明的第二方面,旨在提供一种地面反作用力指标估算方法,包括如下所述的步骤:检测三轴加速度、三轴角速度中的至少任意一种,根据检测到的三轴加速度、三轴角速度中的至少任意一种来计算出用作解释变量的值,根据计算出的用作解释变量的值,利用多元回归分析计算出地面反作用力和地面反作用力指标,基于计算出的地面反作用力指标和判断基准信息,根据评估用户的步行和跑步动作的测量结果计算出的结果,利用多元回归分析计算出地面反作用力和地面反作用力指标,所述判断基准信息是用于根据地面反作用力指标来判断用户步行和跑步动作的信息,呈现跑步动作的评估结果;在利用多元回归分析计算出地面反作用力和地面反作用力指标的步骤中,地面反作用力和地面反作用力指标是使用多元回归方程来计算出的,多元回归方程中预先计算出了将根据测量结果计算出的结果作为解释变量时的偏回归系数。
28.在本发明的第二方面中,根据测量结果计算出的用作解释变量的值可以是,三轴加速度的波形数据的特征量、三轴角速度的波形数据的特征量中的至少任意一种。
29.在本发明的第二方面中,三轴加速度的波形数据的特征量可以包括:所述三轴加速度的波形数据的最大值、最小值、平均值、极大值、极小值和极大值/极小值的数量中的至少任意一种;所述三轴角速度的波形数据的特征量可以包括:所述三轴角速度的波形数据的最大值、最小值、平均值、极大值、极小值、极大值/极小值的数量中的至少任意一种。
30.在本发明的第二方面中,根据测量结果计算出的用作解释变量的值可以包括:步速(步调,cadence)、步行或跑步速度(速度,speed)、脚落地时的角度(走向角,strike angle)、脚的速度(velocity)、步行或跑步时脚的高度(foot height)、脚的位置(distance)中的至少任意一种。
31.在本发明的第二方面中,根据测量结果计算出的用作解释变量的值可以包括身体特征量。
32.在本发明的第二方面中,身体特征量可以包括:用户的身高、体重、脚长中的至少任意一个。
33.在本发明的第二方面中,根据测量结果计算出的用作解释变量的值可以包括步行/跑步条件。
34.在本发明的第二方面中,步行/跑步条件可以包括:地面的倾斜角度、地面材料的硬度、地面材料的摩擦系数、鞋材料的硬度和鞋材料的摩擦系数中的至少任意一种。
35.本发明的第三方面,旨在提供一种地面反作用力指标估算程序,使计算机实现如下所述的功能:检测三轴加速度、三轴角速度中的至少任意一种,根据检测到的三轴加速度、三轴角速度中的至少任意一种来计算出用作解释变量的值,根据计算出的用作解释变量的值,利用多元回归分析计算出地面反作用力和地面反作用力指标,基于计算出的地面反作用力指标和判断基准信息,从评估用户的步行和跑步动作的测量结果计算出的结果,利用多元回归方程计算出地面反作用力和地面反作用力指标,所述判断基准信息是用于根
据所述地面反作用力指标来判断用户步行和跑步动作的信息,所述多元回归方程中预先计算出了将根据测量结果计算出的结果、测量结果的波形数据的特征量以及身体特征量作为解释变量时的偏回归系数,呈现跑步动作的评估结果。
36.本发明的第三方面中,根据测量结果计算出的用作解释变量的值可以是,三轴加速度的波形数据的特征量、三轴角速度的波形数据的特征量中的至少任意一种。
37.在本发明的第三方面中,三轴加速度的波形数据的特征量可以包括:所述三轴加速度的波形数据的最大值、最小值、平均值、极大值、极小值、极大值/极小值的数量中的至少任意一种;所述三轴角速度的波形数据的特征量可以包括:所述三轴角速度的波形数据的最大值、最小值、平均值、极大值、极小值、极大值/极小值的数量中的至少任意一种。
38.在本发明的第三方面中,根据测量结果计算出的用作解释变量的值可以包括:步速(步调,cadence)、步行或跑步速度(速度,speed)、脚落地时的角度(走向角,strike angle)、脚的速度(velocity)、步行或跑步时脚的高度(foot height)、脚的位置(distance)中的至少任意一种。
39.在本发明的第三方面中,根据测量结果计算出的用作解释变量的值可以包括身体特征量。
40.在本发明的第三方面中,身体特征量可以包括:用户的身高、体重和脚长中的至少任意一个。
41.在本发明的第三方面中,根据测量结果计算出的用作解释变量的值可以包括步行/跑步条件。
42.在本发明的第三方面中,步行/跑步条件可以包括:地面的倾斜角度、地面材料的硬度、地面材料的摩擦系数、鞋材料的硬度和鞋材料的摩擦系数中的至少任意一种。
43.发明效果
44.根据本发明,可以提供一种基于从可穿戴传感器获得的数据,以低计算成本计算出地面反作用力指标的地面反作用力指标估算系统、地面反作用力指标估算方法以及地面反作用力指标估算程序。
附图说明
45.图1是表示根据本发明的实施方式的地面反作用力指标估算系统的示意图。
46.图2是表示根据实施方式的模块的构成的一例的框图。
47.图3是表示根据实施方式的外部装置的构成的一例的框图。
48.图4是表示负载速度的实测值和估算值的图表。
49.图5是表示踢腿力的实测值和估算值的图表。
50.图6是表示制动力冲量的实测值和估算值的图表。
51.图7是表示加速冲量的实测值和估算值的图表。
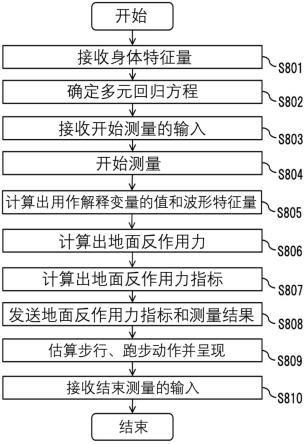
52.图8是根据实施方式的说明地面反作用力指标估算系统的动作的流程图。
具体实施方式
53.接下来,参照附图对本发明的实施方式进行说明。在根据实施方式的附图的记载中,相同或相似的部分标注相同或相似的附图标记。此外,在附图之间也包含彼此关系不同
的部分是不言而喻的。
54.此外,实施方式例示了用于体现本发明的技术思想的装置和方法,本发明的技术思想并不是将各构成要素的构成指定为下面的构成。本发明的技术思想可以在保护范围内记载的权利要求书规定的技术范围内进行各种变更。
55.(实施方式)
56.参照图1~3,对根据本实施方式的地面反作用力指标估算系统进行说明。如图1所示,根据本实施方式的地面反作用力指标估算系统10包括鞋100和外部装置200。鞋100中安装有模块110、传感器部120。模块110和传感器部120通过总线相互连接。
57.鞋100是由用户穿在脚上的,例如是,跑鞋、运动鞋、皮鞋、凉鞋等。在图1中,模块110设置在鞋100的上部,传感器部120设置在鞋100的底部,可由传感器部120测量三轴加速度和/或三轴角速度,只要不妨碍步行和跑步,模块110和传感器部120在鞋100上的安装位置不限于此。其中,三轴加速度和/或三轴角速度是指,三轴方向,即,例如是在水平面上相互呈直角的两个轴、垂直于该两个轴的轴的方向的加速度以及围绕三个轴中的每一个轴的旋转角速度。
58.传感器部120是当用户穿着鞋100步行和跑步时检测鞋100的运动的传感器。在本实施方式中,传感器部120是检测三轴加速度和/或三轴角速度的传感器。传感器部120可以包括例如检测三轴加速度的加速度传感器和检测三轴角速度的角速度传感器。
59.如图2所示,模块110包括电源部111、第1控制部112、第1通信部113、计算部114和第1存储部115。
60.电源部111向模块110和传感器部120提供电力。
61.第1控制部112是控制模块110和传感器部120的处理器。第1控制部112通过执行存储在第1存储部115中的控制程序来控制模块110和传感器部120。
62.第1通信部113是与外部装置200通信的通信接口。第1通信部113包括第1接收部116和第1发送部117。第1通信部113通过无线通信与外部装置200进行通信。第1通信部113可以根据任意通信标准进行通信,只要能够与外部装置200通信即可。
63.第1接收部116从外部装置200接收传感器测量的开始、结束、计算部114中在通过多元回归分析计算地面反作用力指标时使用的用户的身体特征量和/或步行/跑步条件相关的信息,并将用户的身体特征量和/或步行/跑步条件存储在第1存储部115中。用户的身体特征量例如是身高、体重、脚长、脚宽,但也可以包含这些以外的身体特征量。在本实施方式中,用户的身体特征量包括:身高、体重和脚长中的至少任意一种。步行/跑步条件是例如地面的倾斜角度、地面材料的硬度和摩擦系数、鞋的材料的硬度和摩擦系数,但也可以包含这些以外的步行/跑步条件。
64.第1发送部117将传感器部120的测量状态、通过多元回归分析计算出的地面反作用力指标相关的信息以及根据传感器部120的测量结果计算出的结果发送至外部装置200。根据传感器部120的测量结果计算出的结果例如是用户的步速(步调,cadence)、步行或跑步速度(速度,speed)、脚落地时的角度(走向角,strike angle)、脚的速度(velocity)、步行或跑步时脚的高度(foot height)、脚的位置(distance)等指标,但也可以包含这些以外的指标。
65.根据传感器部120的测量结果计算出的结果包括:通过使用传感器部120测量的三
轴加速度获得的结果、通过使用三轴角速度获得的结果、以及使用三轴加速度和三轴角速度获得的结果。在本实施方式中,根据传感器部120的测量结果计算出的结果包括:用户的步速(步调,cadence)、步行或跑步速度(速度,speed)、脚落地时的角度(走向角,strike angle)、脚的速度(velocity)、步行或跑步时脚的高度(foot height)、脚的位置(distance)中的至少任意一种。
66.计算部114根据传感器部120测量的三轴加速度和/或三轴角速度计算出用作解释变量的值。用作解释变量的值包括三轴加速度和/或三轴角速度的波形数据的特征量。其中,由计算部114计算出的三轴加速度和/或三轴角速度的波形数据的特征量,例如是三轴加速度和/或三轴角速度的最大值、最小值、平均值、极大值、极小值、极大/极小值的数,但也可以包含这些以外的特征量。
67.用作解释变量的值还可以包括步调、速度、走向角、脚的速度、步行或跑步时脚的高度、脚的位置中的至少任意一种。用作解释变量的值还可以包括用户的身体特征量。用作解释变量的值还可以包括步行/跑步条件。
68.使用何种值作为用作解释变量的值,如下面所述,根据在计算部114中使用存储在第1存储部115中的多元回归方程和用作解释变量的值来计算出地面反作用力和地面反作用力指标时希望计算出的地面反作用力指标而不同。此外,当计算出的地面反作用力指标不同时,除了用于估算该地面反作用力指标的解释变量之外,多元回归方程和多元回归方程的偏回归系数也会不同。即,根据希望计算出的地面反作用力指标,选择作为用作解释变量的值来使用的值、多元回归方程和多元回归方程的偏回归系数。第1存储部115中存储着表示计算出的地面反作用力指标和与之对应的解释变量、多元回归方程、多元回归方程的偏回归系数的对应关系的例如表格等,基于该表格,可根据希望计算出的地面反作用力指标,选择作为用作解释变量的值来使用的值、多元回归方程和多元回归方程的偏回归系数。
69.在计算部114计算出的用作解释变量的值,在本实施方式中,包括步调、速度、走向角、脚的速度、步行或跑步时脚的高度、脚的位置中的至少任意一种。在本实施方式中,三轴加速度和/或三轴角速度的波形数据的特征量包括三轴加速度的最大值和最小值中的至少任意一种。三轴加速度和三轴角速度的波形数据的特征量还可以包括例如三轴角速度的最大值和最小值等。
70.进一步地,计算部114使用存储在第1存储部115中的多元回归方程和用作解释变量的值,计算地面反作用力和地面反作用力指标。此时,如上所述,将表示计算出的地面反作用力指标和与之相应的解释变量、多元回归方程、多元回归方程的偏回归系数的对应关系的表格等存储于第1存储部115中,基于该表格,根据希望计算出的地面反作用力指标,可选择存储于第1存储部115中的多元回归方程和用作解释变量的值。计算部114中计算出的地面反作用力指标,在本实施方式中,是负载速度(loading rate)、踢腿力(kicking force)、制动力冲量(braking impulse)和加速冲量(accerelation impulse),但计算部114中计算出的地面反作用力指标也可以包含其他地面反作用力指标,只要是可以从地面反作用力计算出的指标即可。
71.外部装置200向第1接收部116发送指示传感器部120测量的开始、结束的信息以及计算部114中的用于进行多元回归分析的身体特征量和步行/跑步条件,只要是能够从第1发送部117接收传感器部120测量的开始、结束和地面反作用力指标的终端,可以使用任何
形式的终端,例如可以是个人计算机、移动终端等。为了让用户穿上鞋100,并在通过传感器部120进行测量的同时实时确认步行、跑步动作的评估,外部装置200优选为移动终端等可便携终端。
72.外部装置200可以是能够安装在身体的一部分的形状,例如手表、耳机。外部装置200例如是如手表的形状时,则可在手表形状的外部装置200的显示部上确认步行、跑步动作的评估,而不会妨碍步行和跑步运动。外部装置200例如是耳机时,则可以通过语音确认步行和跑步动作的评估。
73.如图3所示,外部装置200包括:第2控制部210、第2通信部220、呈现部230、第2存储部240、输入部250。
74.第2控制部210是控制外部装置200的每个要素的处理器。第2控制部210通过执行存储在第2存储部240中的控制程序来控制外部装置200的每个元件。第2控制部210基于接收到的地面反作用力指标和存储在第2存储部240中的判断基准信息,评估穿着鞋100步行或跑步的用户的步行或跑步动作,并将评估结果发送到呈现部230。
75.判断基准信息是,用于根据地面反作用力指标来判断用户的步行、跑步动作的信息。负载速度(loading rate)是,当脚着地时脚上负载迅速程度的指标,例如,作为判断基准信息可以提前设置负载速度的阈值,如果负载速度大于阈值,则可以警告通知用户足部过载。制动力冲量(braking impulse)是,步行和跑步时脚上的制动分量,但可以提前设置制动力冲量的阈值,如果制动力冲量大于阈值,则判断为正在进行低效步行,并通知用户。同样,加速冲量(acceleration impulse)是步行和跑步时脚上的加速度分量,但可以提前设置加速冲量的阈值,如果加速冲量大于阈值,则判断为获得了大的推动力,并通知用户。
76.第2通信部220是与鞋100进行通信的通信接口。第2通信部220包括第2接收部221和第2发送部222。第2通信部220通过无线通信与鞋100进行通信。第2通信部220可以根据任意通信标准进行通信,只要能够与鞋100通信即可。
77.呈现部230呈现接收到的地面反作用力指标。呈现部230除了地面反作用力指标或代替地面反作用力指标,根据第2控制部210发送的评估结果,可以对使用鞋100的用户呈现警告和评估结果。呈现部230可以通过文字、图片、语音等呈现给用户。进一步地,也可以呈现用户的步速(步调,cadence)、步行或跑步的速度(速度,speed)等通知用户步行、跑步状态的信息。可以通过用户从输入部250的输入来指定呈现哪些信息。
78.除了控制程序、判断基准信息、用户身体特征量、步行/跑步条件之外,第2存储部240可以与传感器部120的测量日期和时间一起存储通过多元回归分析计算的地面反作用力指标、通过传感器部120测量获得的结果,即,例如,用户的步速(步调,cadence)、步行或跑步速度(速度,speed)、脚落地时的角度(走向角,strike angle)、脚的速度(velocity)、步行或跑步时脚的高度(foot height)、脚的位置(distance)。第2控制部210可以根据地面反作用力指标和测量结果随时间的变化来判断用户训练、步行、跑步训练的效果等。
79.输入部250接收来自用户的输入。用户从输入部250输入在计算部114中通过多元回归分析计算地面反作用力指标时使用的用户身体特征量,即身高、体重和脚长相关的信息以及步行/跑步条件。从输入部250输入的用户的身体特征量和步行/跑步条件被存储在第2存储部240中。
80.图1示出了一个外部装置200通过无线通信连接到鞋100的状态,但是外部装置200
的数量可以是多个。例如,作为外部设备的个人计算机和移动终端通过无线通信连接到鞋100,并从个人电脑输入用户的身体特征量时,移动终端不再需要具备输入部,从而能够使移动终端更加小型化。
81.此外,存储在第2存储部240中的地面反作用力指标和测量结果随时间变化的数据,可以不存储在第2存储部240,例如,通过无线通信将作为外部设备的个人计算机和移动终端连接到鞋100,并将上述数据存储到个人计算机具有的存储装置中。
82.接下来,说明在计算部114中求出用于计算出地面反作用力的多元回归方程的方法。
83.多元回归方程一般是用一个或多个解释变量的函数表示目标变量的方程,用一个或多个解释变量的线性函数、二次以上的多项方程式表示。在本实施方式中,作为多元回归方程,使用了以下式。
84.数学式1
85.yi=β0+β1x
i1
+β2x
i2
+
…
+β
p
x
ip
+ei86.其中,yi是目标变量,在本实施方式中是地面反作用力,β0和βn是偏回归系数,x
in
是解释变量,ei是误差项(其中n是1~p的整数)。在本实施方式中,解释变量是三轴加速度和三轴角速度的波形数据的特征量、通过传感器部120测量的三轴加速度和三轴角速度计算出的结果、受试者的身体特征量以及步行和跑步条件。作为三轴加速度和三轴角速度的波形数据的特征量,在本实施方式中,使用了加速度的波形数据的最大值和加速度的波形数据的最小值中的至少任意一种。作为从三轴加速度和三轴角速度计算出的结果,在本实施方式中,使用了步速(步调,cadence)、步行或跑步速度(速度,speed)、脚落地时的角度(走向角,strike angle)、脚的速度(velocity)、步行或跑步时脚的高度(foot height)、脚的位置(distance)中的至少任意一种。作为受试者的身体特征量,在本实施方式中,使用了受试者的身高、体重、脚长中的至少任意一种。作为步行/跑步条件,在本实施方式中,使用了地面的倾斜角度、地面材料的硬度以及摩擦系数、鞋材料的硬度以及摩擦系数中的至少任意一种。
87.为了求上式的偏回归系数,进行了地面反作用力的测量以及通过传感器部120的三轴加速度和三轴角速度的测量。具体而言,受试者在穿着鞋100的状态下在地面反作用力仪器上步行以及跑步,地面反作用力的测量、传感器部120的三轴加速度以及三轴角速度的测量是同时进行的。从传感器部120测量得到的三轴加速度以及三轴角速度,计算出用作解释变量的值,即步调、速度、走向角、脚的速度、步行或跑步时脚的高度、脚的位置中的至少任意一种、以及三轴加速度以及三轴角速度的波形数据的特征量,即加速度的波形数据的最大值和加速度的波形数据的最小值中的至少任意一种后,根据地面反作用力计测量得到的地面反作用力的值、计算出的步调、速度、走向角、脚的速度、步行或跑步时脚的高度、脚的位置中的至少任意一种、加速度的波形数据的最大值和加速度的波形数据的最小值中的至少任意一种、受试者的身高、体重和脚长中的至少任意一个,通过最小二乘法计算出偏回归系数得到多元回归方程。
88.图4~7示出了作为根据地面反作用力计算出的地面反作用力指标的负载速度(loading rate)、踢腿力(kicking force)、制动力冲量(braking impulse)和加速冲量(accerelation impulse)的地面反作用力的实测值以及从根据多元回归方程得到的地面
反作用力的估算值分别计算出的值。图4示出了负载速度,图5示出了踢腿力,图6示出了制动力冲量,图7示出了加速冲量。图4~7所示的值表示了将20名受试者作为对象进行测量的结果,各数据中的点的浓淡表示同一受试者的数据具有相同的浓淡。
89.根据图4~7所示的值计算出的决定系数r2和多重相关系数的平均值r
ave
见下表。
90.表1
[0091] 决定系数r2多重相关系数的平均值r
ave
负载速度7640.831踢腿力0.9390.943制动冲量0.6720.779加速冲量0.7560.846
[0092]
确定系数r2和多重相关系数的平均值r
ave
分别取0~1之间的值,该值越接近1,则表示实测值和估算值越相互接近。如上表所示的确定系数r2和多重相关系数的平均值r
ave
均取约0.7以上的值,判断在本实施方式中使用的多元回归方程是合适的。
[0093]
接下来,将参照图8说明当用户在穿着鞋100的状态下进行传感器部120的测量并且评估用户步行或跑步时的地面反作用力指标估算系统10的动作的一例。另外,使多元回归方程中的偏回归系数已经确定,用户处于穿着鞋100的状态,电源部111处于开启状态。用户处于步行或跑步状态,或者,用户在传感器部120开始测量后开始步行或跑步。
[0094]
在步骤s801中,输入部250接收来自用户的身体特征量和步行/跑步条件的输入,并将身体特征量和步行/跑步条件从第2通信部220发送到第1接收部116。
[0095]
在步骤s802中,将第1接收部116接收到的身体特征量和步行/跑步条件存储在第1存储部115中,并确定在计算部114通过多元回归分析计算出地面反作用力指标时使用的多元回归方程。
[0096]
在步骤s803中,输入部250从用户接收传感器部120的测量开始的输入,并且将测量开始的输入信号从第2通信部220发送到第1接收部116。
[0097]
在步骤s804中,传感器部120开始测量。
[0098]
在步骤s805中,在计算部114中,根据传感器部120测量的三轴加速度以及三轴角速度计算出了用作解释变量的值,即,步速(步调,cadence)、步行或跑步速度(速度,speed)、脚落地时的角度(走向角,strike angle)、脚的速度(velocity)、步行或跑步时脚的高度(foot height)、脚的位置(distance)中的至少一种和三轴加速度以及三轴角速度的波形数据的特征量,即,加速度的波形数据的最大值、加速度的波形数据的最小值中的至少任意一种。
[0099]
在步骤s806中,根据计算部114在步骤s805中计算出的步调、速度、走向角、脚的速度、步行或跑步时脚的高度、脚的位置中的至少任意一种和传感器部120测量的三轴加速度的波形数据的最大值和最小值中的至少任意一种和身高、体重和脚长中的至少任意一个和地面的倾斜角度、地面材料的硬度和摩擦系数、鞋的材料的硬度和摩擦系数中的至少任意一种,计算出地面反作用力。
[0100]
在步骤s807中,计算出地面反作用力指标(负载速度、踢腿力、制动力冲量、加速冲量)。
[0101]
在步骤s808中,计算出的地面反作用力指标和通过传感器部120的测量获得的结
果,从第1发送部117被发送到第2通信部220,并存储在第2存储部240中。
[0102]
在步骤s809中,第2控制部210基于地面反作用力指标和存储在第2存储部240中的判断基准信息,评估用户的步行、跑步动作,并将评估结果发送到呈现部230。
[0103]
在步骤s810中,输入部250接收来自用户的传感器部120结束测量的输入,并结束传感器部120的测量。
[0104]
如上所述,本发明能够使用从廉价的运动传感器获得的数据,估算出使用传统的地面反作用力计获得的地面反作用力指标。因此,无论测量环境如何,都可以计算出地面反作用力指标,这在传统测量方法中是很困难的。此外,与使用了机器学习的方法等传统的估算方法相比,是抑制了计算成本的方法,用词容易搭载在计算资源有限的传感器内置型微型计算机中,通用性高。此外,通过低计算成本容易实时处理。步行和跑步过程中信息的实时反馈有效改变了当事人的动作方式,例如,对于改善/预防残疾、寻求提高成绩的跑步者、康复患者和教练来说,可能是一种有用的技术。
[0105]
以上,本发明包括此处未记载的各种实施方式等,是不言而喻的。因此,本发明的技术范围仅由上述说明合理设定的权利要求的范围来确定。
[0106]
附图标记说明
[0107]
10 地面反作用力指标估算系统
[0108]
100 鞋
[0109]
110 模块
[0110]
111 电源部
[0111]
112 第1控制部
[0112]
113 第1通信部
[0113]
114 计算部
[0114]
115 存储部
[0115]
116 第1接收部
[0116]
117 第1发送部
[0117]
120 传感器部
[0118]
200 外部装置
[0119]
210 第2控制部
[0120]
220 第2通信部
[0121]
221 第2接收部
[0122]
222 第2发送部
[0123]
230 呈现部
[0124]
240 第2存储部
[0125]
250 输入部
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1