一种用于内窥镜外科手术过程的可操纵臂的制作方法
本发明涉及内窥镜外科手术器械领域。
背景技术:
1、胃肠道(gi)癌症是全世界最常见的癌症。根据世界卫生组织(who)的癌症统计数据,结直肠癌和胃癌在全球范围内分别是与癌症有关的死亡的第二和第三大常见原因,2018年分别达到862,000例和783,000例。虽然晚期gi癌症难以治愈,但早期gi癌症具有明显更好的预后。gi癌症在早期阶段的5年生存率在全世界超过90%。
2、gi癌症的常规治疗方法为外科手术,包括切除和吻合,且与显著的发病率和死亡率相关联。
3、胃肠道(gi)外科手术的优选方法包括引导外科手术器械通过内窥镜的器械/活检通道。外科医生使用内窥镜的近端上的控制手柄操纵内窥镜的远端,将柔性的内窥镜通过口腔插入胃部到达目标位置,或从肛门向上插入大肠到达目标位置。内窥镜至少有一个活检通道,从内窥镜的近端将远端末梢处具有外科手术器具的长且柔性的器械插入该活检通道。最常见的柔性内窥镜由olympus公司制造,其具有直径大至3.7mm的活检通道,但也可小至2.8mm或更小。
4、medrobotics提出一种半机器人内窥镜,具有用于手动外科手术器械的通道(见us10016187b2中的描述)。外科手术器械的直径由多个离散的关节组装而成,以便在由一对对抗线(在相对侧的两根线沿相反的方向牵拉)牵拉时允许关节连接。若要使关节向一个方向弯曲,须牵拉一根线绳,而须释放或推动另一根线绳。离散式关节的设计和组装很复杂,且需要4mm粗的宽大直径。因此,这种外科手术器械的一个主要缺点是其无法适应普通的柔性内窥镜中的活检通道。
5、endomaster提出一种类似的机器人外科手术器械,其也是由离散式的基于关节的机构组装而成(见us20210186309a1中的描述),其存在同样的缺点。
6、lumendi提出一种内窥镜外科手术器械,其包括由例如镍钛(镍钛诺)管的单体柔性材料制成的柔性主干,沿着所述管的侧部开有不连接的、离散的槽(在us20200305906a1中描述)。通过牵拉固定于管的各个侧的线绳,直的管能够向任何方向弯曲。同样,这种设计要求复杂的操作,在牵拉一根线绳的同时释放相对的线绳。此外,这种外科手术器械过粗,无法与普通内窥镜中的活检通道配合使用,必须与其专属配件系统一起使用。
7、endotheia提出一种可与普通内窥镜一起使用的外科手术器械,如在us10441371b2中所描述的。这种设计包括嵌套式的同心镍钛诺管,每根管均是预弯的。这些管具有能够使其延伸通过普通内窥镜的活检通道的总直径。为了使外科手术器械向目标位置弯曲,每根嵌套式的管均延伸到适当的程度以形成所需的弯曲度。无须使用线绳对管进行弯曲。而每个弯管应延伸到什么程度要求复杂的计算,这使得软件和机器人控制相当必要,且即使情况要求进行手动优先控制,其也是不可信的。此外,对细管的提升力对某些手术操作而言过弱。而且,管不能提供急剧的弯曲,内窥镜须放置在距离目标部位相对较远的位置,使得管延伸地足够远,以提供足够的弯曲度。由此,内窥镜的末梢上的摄像机可能距离外科手术器械的远端过远,无法为操作提供良好的可视化;如果目标部位距离内窥镜的末梢过近,则器械的横向和垂向可及范围可能受到限制。
8、因此,期望能提出一种既提供灵巧的组织操作,又适于与普通内窥镜一起使用的外科手术器械,并为外科医生进行更好的控制提供了可能性。
技术实现思路
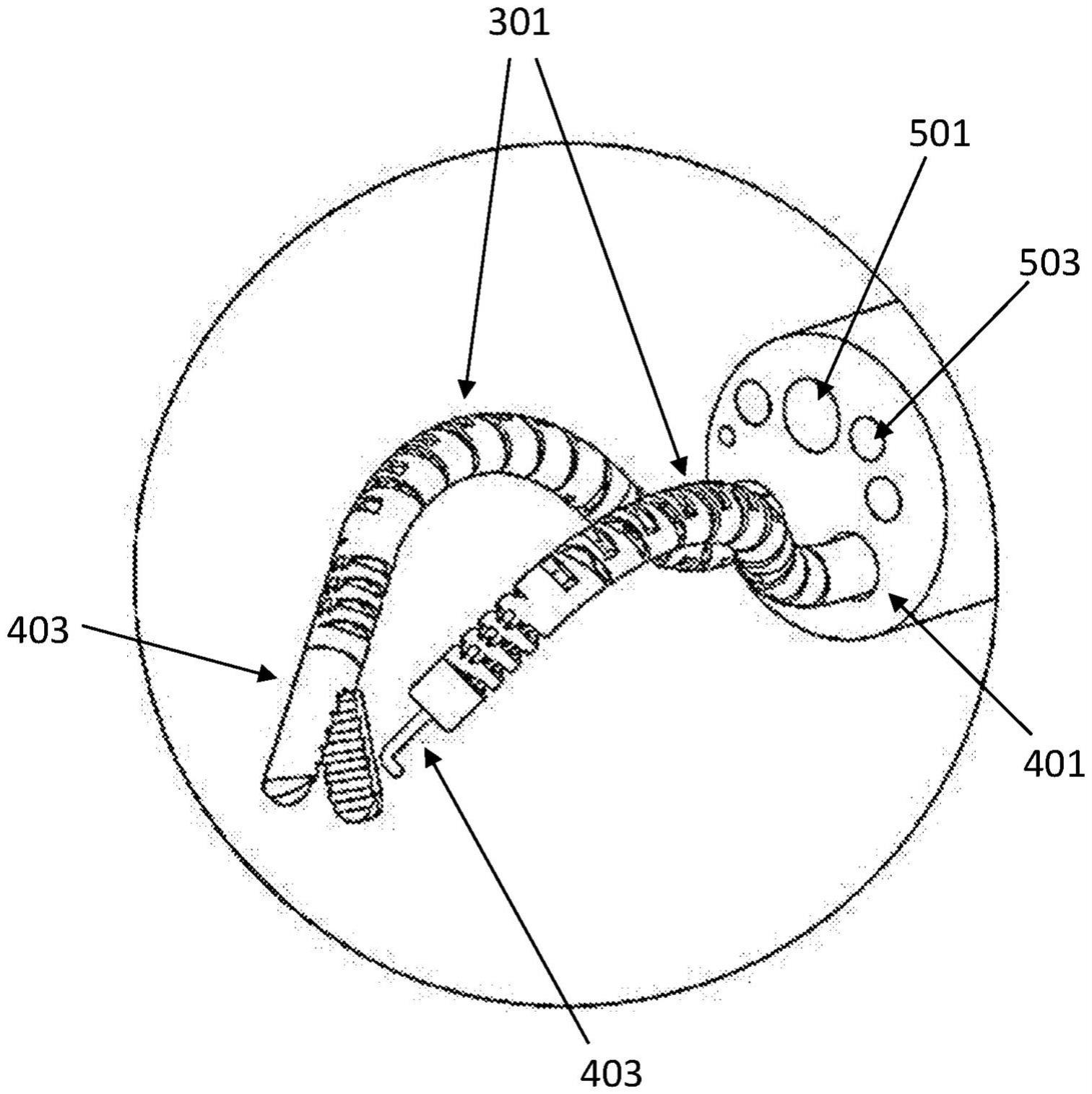
1、第一方面,本发明提出一种用于内窥镜外科手术过程的可操纵臂,包括:具有近端和远端的管状构件;远端适于装配有外科手术端部操控器;管状构件由弹性材料制成;在管状构件的内部从近端延伸的线绳;线绳附接至管状构件的远端且附接至管状构件的侧部;管状构件在纵向上能够具有弯曲度;其中当通过线绳牵拉管状构件的远端时,弯曲度变化;且材料的弹性为管状构件提供偏向性,使得在释放对远端的牵拉时弯曲度变化发生反转。
2、有利地,本发明提供这样一种可能性,即释放牵拉可以使偏向性显现出来,并使可操纵臂恢复到自然状态下的形状。这使得现有技术的可操纵技术中的第二根线绳成为冗余。这种单线绳方案比现有技术中的双线绳方案更容易,后者要求在牵拉一根线绳和释放另一根线绳之间进行额外的协调,并且单线绳方案在可操纵臂的内部为其他部件或线绳节省出空间。
3、管状构件不一定为有实心壁的管,而可以为提供所需的特征和功能的任何纵长构件,例如环状物的线圈。
4、优选地,管状构件沿管状构件的轴线具有第一侧和第二侧;第一侧比第二侧的可压缩性相对更大;第二侧比第一侧的可压缩性相对更小;其中管状构件的附接线绳的侧部为第一侧;且对线绳的牵拉使第一侧压缩,以改变管状构件的弯曲度。有利地,第一侧的较大的可压缩性会适应第二侧的弯曲和弯折,允许整个可操纵臂弯曲和弯折。第一侧的较大的可压缩性和第二侧的较小的可压缩性可以通过采用不同材料制成第一侧和第二侧来提供,或者通过结构设计来提供。
5、优选地,可操纵臂进一步包括在第一侧内的间隙,以提供第一侧的可压缩性;其中牵拉线绳,通过使间隙更合拢且使第二侧朝向第一侧弯曲,而改变管状构件的弯曲度。此特征涉及在结构上提供的可压缩性,其改善了管状构件的材料所提供的固有可压缩性。
6、优选地,可操纵臂进一步包括在管状构件内用于引导线绳的平移的线绳导向件或孔眼。
7、优选地,管状构件在自然状态下是弯的,使得管状构件具有凹侧和凸侧;且管状构件的凸侧为第一侧。有利地,这允许单根线绳可以弯折可操纵臂使其从向一个方向弯曲转为向相反的方向弯曲,直至第一侧的可压缩性允许的程度,有可能使可操纵臂在平面上摆动。
8、在管状构件在内窥镜的活检通道中使用的应用中,与没有弯曲度的相同长度的直的可操纵臂相比,管状构件的弯度有利地允许内窥镜的末梢上的摄像机更靠近目标组织。此外,摄像机的视野不会受到遮挡,因为弯曲度使可操纵臂的主体远离内窥镜的视野中心。
9、优选地,管状构件为螺旋状的环状物的管状线圈;管状构件的弯曲度设置为使得:环状物在第一侧的边缘间隔开,以提供间隙;环状物中的每个在第二侧的边缘抵靠每个相邻的环状物的边缘;其中第一侧和第二侧位于管状构件的相对侧。抵靠的边缘会防止压缩,并提供可操纵臂围绕其弯折的杠杆作用。
10、螺旋状环状物结构的优点有利之处是从单根原始管上切割出可操纵臂的可能性,其具有经济效益并提供了连续结构。这也提供了利用环状结构的柔性来弯折可操纵臂,同时依靠构成管状构件的材料的刚度来提供偏向性的可能性。在实施例中,将第一侧的环状物描述为可以分开或靠拢的肋,而将第二侧描述为脊。
11、可选地,环状物沿可操纵臂的不同部分具有不同的螺旋间距和/或间隔变化,以便为不同部分提供不同的柔性。
12、优选地,远端部分比近端部分更具有柔性,有利地防止牵拉附接至可操纵臂的较远端部分的线绳会导致较近端部分的意外变形;这样允许对较远端部分的弯曲进行控制,而不影响其他较近端部分的弯曲,对可操纵臂提供更好的控制。
13、优选地,环状物通过对管进行至少一次螺旋状切割而制成。
14、优选地,可操纵臂进一步包括环状物中的至少一个在第二侧的边缘中的至少一个切口。有利地,切口允许脊具有一定程度的可伸展性,从而增加柔性。
15、可选地,管状构件为螺旋状的环状物的管状线圈;且可操纵臂进一步包括相对两列的耦合关节,每列沿管状构件的相对侧布置;每列的耦合关节中的每个可旋转地连接相应两个相邻的环状物;使得相对列的耦合关节提供第二侧;管状构件具有位于管状构件的横截面的中心并沿着其长度的轴线;以及第一侧和第二侧关于管状构件的轴线彼此正交地布置。
16、优选地,管状构件由单件材料制成;使得管状构件为连续结构(即保持为整体结构)。例如,单件材料为单管。有利地,连续结构提供一种可能性,即仅依赖构成该结构的材料的固有强度和刚度,而不要求额外的连接或耦合来联结独立部分。
17、可选地,有附接至第二侧的长度上的纵长弹性件;纵长弹性件通过提供额外的结构刚度来加强偏向性。
18、优选地,管状构件包括至少两个区段;在管状构件内从近端延伸的相应数量的线绳;每根线绳固定于每个区段的远端,最远区段的远端为管状构件的远端;每个区段能够在管状构件的纵向上具有弯曲度,使得当相应的线绳牵拉每个区段的远端时每个区段的弯曲度发生改变;其中材料的弹性为管状构件提供偏向性,使得在释放对每个区段的远端的牵拉时,每个区段的弯曲度变化发生反转。
19、有利地,每个区段均可促成对不同平面的运动,使得可操纵臂的远端末梢有更好的运动自由度。
20、优选地,至少两个区段中的每个的弯曲度变化位于不同的平面内。
21、优选地,每个区段的刚度不同,使得位于可操纵臂的近端附近的区段较大,以便在牵拉不同区段的线绳时,减小各区段之间的机械耦合效应。
22、典型地,可操纵臂置于传输管的远端;传输管沿其轴向方向具有最小的可压缩性和可延展性,具有高的扭转刚度以提供有效扭矩和力传递,力传递包括从牵拉线绳到可操纵臂和端部操控器的力传递,传输管包括通道,线绳与其他必要组件,例如电连接或外科手术功能,如抽吸器或注射用管一并穿入通道中;线绳的近端连接至用于牵拉线绳的旋钮和/或操控杆;使得当在传输管的近端通过线绳牵拉管状构件的远端时,弯曲度会发生变化。
23、第二方面,本发明提出一种将空心管制成用于内窥镜外科手术过程的可操纵臂的方法,包括以下步骤:
24、a)提供具有近端和远端的空心管;
25、远端适于装配有外科手术端部操控器;并且空心管由弹性材料制成;
26、b)沿管的长度且周向地切割空心管,以形成螺旋状切割;
27、螺旋状切割沿管的至少一侧形成间隙;
28、c)将线绳插入空心管的近端;以及
29、d)将线绳附接至空心管,附接在:
30、i.管的间隙所在侧;以及
31、ii.远离近端使得线绳延伸超过间隙。
32、切割整根空心管形成可操纵臂提供了可操纵臂具有连续结构的可能性。
33、该方法允许为管的直径预先选择单管材料,量身定制可操纵臂的尺寸,以配套内窥镜的通道尺寸。相比之下,依靠将不同的部件组装在一起的现有技术的方法,制造小的可操纵臂是比较困难的。
34、优选地,方法进一步包括以下步骤:将空心管保持在弯曲的位置;以及通过塑性变形或热处理使空心管在自然状态下对弯曲产生记忆。
35、优选地,方法进一步包括以下步骤:切割空心管,使得在环状物中的每个上留有耦合器,用于与相邻的环状物耦合。
- 还没有人留言评论。精彩留言会获得点赞!