用于测量泡沫压缩元件的厚度的系统和方法与流程
背景技术:
1、乳房x线照相和断层合成成像期间的压缩具有多种目的。例如,它:(1)使乳房在x射线通量方向上变薄,从而使患者的辐射曝光从成像未被压缩的乳房的较厚部分所需的水平降低;(2)使乳房在x射线通量方向上的厚度更均匀,从而有利于在整个乳房图像上的图像平面上更均匀地曝光;(3)在x射线曝光期间固定乳房,从而减少图像模糊;(4)将乳房组织从胸壁带出到成像曝光场,从而允许更多的组织成像。当乳房被压缩时,通常技术人员操纵乳房以适当地定位乳房并抵消压缩具有将乳房组织推向胸壁并离开图像场的趋势。
2、用于乳房x线照相和断层合成的标准压缩方法使用可移动的、刚性的、可透射线的压缩桨。将乳房放置在通常是平坦的乳房支撑平台上,然后通常在技术人员或其它保健专业人员将乳房固定到位的同时,桨压缩乳房。技术人员还可以操纵乳房,以确保图像接受器的视野中的正确组织覆盖。
3、乳房x线照相和乳房断层合成中的一个已知挑战是当乳房被压缩(这必须以足够的力来完成以固定乳房并散开乳房组织以便进行x射线成像)时患者可能感到不适。不适感可能潜在地导致患者移动,从而对图像质量产生负面影响。不适感也可能潜在地阻止患者接受乳腺癌筛查。另一个已知的挑战是确保成像场包括期望量的乳房组织。
技术实现思路
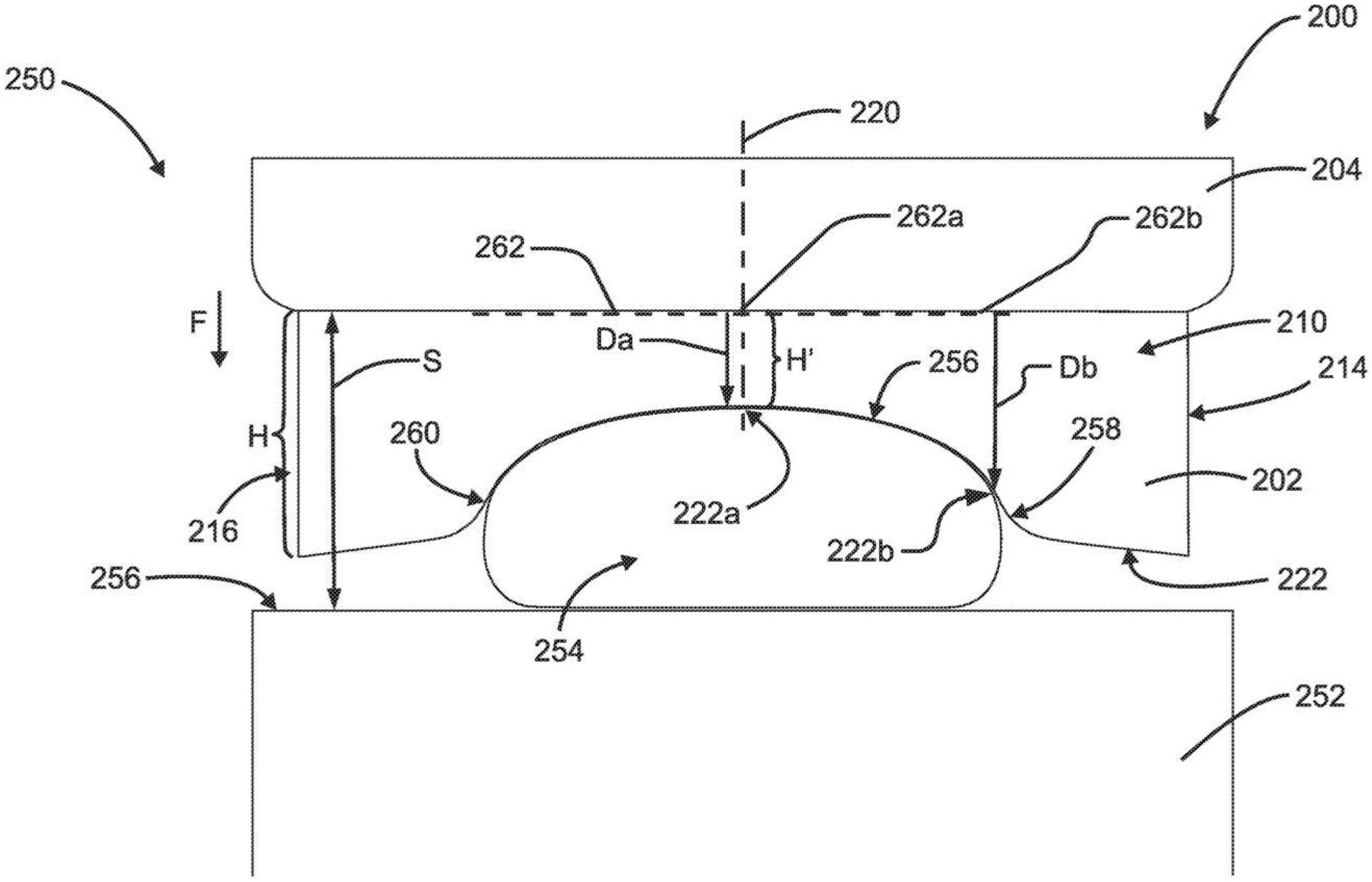
1、一方面,本技术涉及一种利用乳房成像系统对患者的乳房进行成像的方法,该方法包括:将乳房支撑在乳房支撑平台上;利用乳房固定元件向乳房施加压缩力,该乳房固定元件包括刚性基板、固定在刚性基板下方的泡沫压缩元件以及力传感器,并且其中泡沫压缩元件在施加压缩力期间与乳房接触;基于所施加的压缩力来在力传感器处检测力信号;至少部分地基于在力传感器处检测到的力信号来确定靠近力传感器的乳房的压缩后的厚度;以及至少部分地基于所确定的靠近力传感器的乳房的厚度来设置自动曝光控制。在示例中,确定靠近力传感器的乳房的压缩后的厚度包括:确定乳房支撑平台与刚性基板之间的分离距离;至少部分地基于在力传感器处检测到的力信号获得靠近力传感器的压缩后的泡沫厚度;以及从分离距离中减去靠近力传感器的压缩后的泡沫厚度以确定靠近力传感器的乳房的压缩后的厚度。在另一个示例中,力传感器被部署为靠近刚性基板的前壁并且靠近从前壁延伸的中心线。在又一个示例中,设置自动曝光控制还至少部分地基于压缩后的泡沫厚度和泡沫密度中的至少一个。在又一个示例中,力传感器包括多个力传感器。
2、在上述方面的另一个示例中,多个力传感器以网格图案布置在刚性基板上。在示例中,多个力传感器被布置为沿着从刚性基板的前壁延伸的中心线部署。在另一个示例中,靠近力传感器的压缩后的泡沫厚度与靠近力传感器的乳房的压缩后的厚度基本上垂直对准。在又一个示例中,靠近力传感器的压缩后的泡沫厚度、靠近力传感器的压缩后的乳房厚度以及力传感器基本上垂直对准。在又一个示例中,至少一个力传感器包括沿着从乳房固定元件的前边缘延伸的线部署的多个力传感器。
3、在上述方面的另一个示例中,线沿着刚性基板的中心区域部署。在示例中,该方法还包括确定泡沫压缩元件的压缩后的厚度。在另一个示例中,在至少一个力传感器处确定泡沫压缩元件的压缩后的厚度包括从查找表获得泡沫厚度测量,该查找表包括多个力信号和多个对应的泡沫厚度测量。在又一个示例中,该方法还包括识别泡沫压缩元件类型,并且其中查找表与泡沫压缩元件类型相关联。在又一个示例中,识别泡沫压缩元件类型包括接收识别信号。
4、在上述方面的另一个示例中,确定乳房的压缩厚度至少部分地基于所确定的泡沫传感器处的泡沫压缩元件的厚度以及乳房支撑平台与刚性基板之间的分离距离。在示例中,泡沫压缩元件的压缩后的厚度位于泡沫压缩元件的与至少一个力传感器基本上垂直对准的位置处。在另一个示例中,至少一个力传感器部署在刚性基板与泡沫压缩元件之间。在又一个示例中,至少一个力传感器部署在泡沫压缩元件内。
技术特征:
1.一种利用乳房成像系统对患者的乳房进行成像的方法,该方法包括:
2.如权利要求1所述的方法,其中确定靠近力传感器的乳房的压缩后的厚度包括:
3.如权利要求1-2中的任一项所述的方法,其中力传感器被部署为靠近刚性基板的前壁并且靠近从前壁延伸的中心线。
4.如权利要求1-3中的任一项所述的方法,其中设置自动曝光控制还至少部分地基于压缩后的泡沫厚度和泡沫密度中的至少一个。
5.如权利要求1-4中的任一项所述的方法,其中力传感器包括多个力传感器。
6.如权利要求5所述的方法,其中所述多个力传感器以网格图案布置在刚性基板上。
7.如权利要求5-6中的任一项所述的方法,其中所述多个力传感器被布置为沿着从刚性基板的前壁延伸的中心线部署。
8.如权利要求2所述的方法,其中靠近力传感器的压缩后的泡沫厚度与靠近力传感器的乳房的压缩后的厚度基本上垂直对准。
9.如权利要求8所述的方法,其中靠近力传感器的压缩后的泡沫厚度、靠近力传感器的压缩后的乳房厚度以及力传感器基本上垂直对准。
10.如权利要求1-9中的任一项所述的方法,其中所述至少一个力传感器包括沿着从乳房固定元件的前边缘延伸的线部署的多个力传感器。
11.如权利要求10所述的方法,其中线沿着刚性基板的中心区域部署。
12.如权利要求1-11中的任一项所述的方法,还包括确定泡沫压缩元件的压缩后的厚度。
13.如权利要求12所述的方法,其中确定在所述至少一个力传感器处的泡沫压缩元件的压缩后的厚度包括从查找表获得泡沫厚度测量,该查找表包括多个力信号和多个对应的泡沫厚度测量。
14.如权利要求13所述的方法,其中该方法还包括识别泡沫压缩元件类型,并且其中查找表与泡沫压缩元件类型相关联。
15.如权利要求14所述的方法,其中识别泡沫压缩元件类型包括接收识别信号。
16.如权利要求1-15中的任一项所述的方法,其中确定乳房的压缩后的厚度至少部分地基于在泡沫传感器处确定的泡沫压缩元件的厚度以及乳房支撑平台与刚性基板之间的分离距离。
17.如权利要求12-15中的任一项所述的方法,其中泡沫压缩元件的压缩后的厚度位于泡沫压缩元件与所述至少一个力传感器基本上垂直对准的位置处。
18.如权利要求1-17中的任一项所述的方法,其中所述至少一个力传感器部署在刚性基板与泡沫压缩元件之间。
19.如权利要求1-17中的任一项所述的方法,其中所述至少一个力传感器部署在泡沫压缩元件内。
技术总结
一种利用乳房成像系统对患者的乳房进行成像的方法包括将乳房支撑在乳房支撑平台上。利用乳房固定元件向乳房施加压缩力,该乳房固定元件包括刚性基板、固定在刚性基板下方的泡沫压缩元件以及力传感器。泡沫压缩元件在施加压缩力期间与乳房接触。基于所施加的压缩力在力传感器处检测力信号。至少部分地基于在力传感器处检测到的力信号来确定靠近力传感器的乳房的压缩后的厚度。至少部分地基于所确定的靠近力传感器的乳房的厚度来设置自动曝光控制。
技术研发人员:K·F·德弗雷塔斯,B·仁
受保护的技术使用者:豪洛捷公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!