多关节型手术装置的制作方法
本发明涉及一种多关节型手术装置,更具体地,涉及一种安装在机器人手臂上或可手动操作以用于腹腔镜手术或各种手术的多关节型手术装置。
背景技术:
1、在医学上,手术是指通过利用医疗器械切割、切开或操纵皮肤、粘膜或其他组织来治疗疾病。特别地,通过切开手术部位的皮肤并对其里面的器官进行治疗、成型或去除的开腹手术会导致出血、副作用、患者疼痛和疤痕等问题。因此,近年来,作为替代方案,通过在皮肤中形成预定孔并仅插入诸如腹腔镜、手术器械、显微手术显微镜之类的医疗装置来进行的手术或使用机器人(robot)的手术备受关注。
2、此处,手术机器人是指具有可代替外科医生进行手术活动的功能的机器人。这些手术机器人的优点是能够比人类更加准确、精确地进行动作,并且可以进行远程手术。
3、目前全世界正在研发的手术机器人包括骨科手术机器人、腹腔镜手术机器人、立体定向手术机器人等。此处,腹腔镜手术机器人是利用腹腔镜和微型手术器械进行微创手术的机器人。
4、腹腔镜手术是一种通过在腹腔区域钻一个或多个小孔并插入作为内窥镜的腹腔镜以查看腹腔内部来进行手术的尖端手术技术,也是未来有望发展的一个领域。当前的腹腔镜安装有计算机芯片,可以获得比肉眼看到的更清晰和放大的图像,并且已经发展到当使用专门设计的腹腔镜手术器械,同时通过显示器查看屏幕时,可以进行任何类型的手术。
5、另外,虽然腹腔镜手术的范围与开腹手术几乎相同,但其与开腹手术相比具有并发症更少、术后可以更早地开始进行治疗、有利于保持手术患者的体力或免疫功能的优点。因此,在美国和欧洲等地,腹腔镜手术逐渐被视为治疗结肠癌等的标准手术。
6、同时,手术机器人一般由主机器人和从机器人组成。当手术人员操作设置在主机器人中的操纵杆(例如,手柄)时,通过操作结合到从机器人的机器人手臂或由机器人手臂抓握的手术器械来进行手术。
技术实现思路
1、技术问题
2、本发明的目的在于提供一种多关节型手术装置,其中,所述多关节型手术装置安装在机器人手臂上或可手动操作以用于腹腔镜手术或各种手术,其补偿在俯仰动作时发生的钳口导线的移动,使得俯仰动作和偏转动作/致动动作独立且顺利地进行。
3、技术方案
4、根据本发明一实施例提供一种多关节型手术装置,其特征在于,包括:末端工具,其包括一个或多个钳口以及形成为与所述钳口结合且与所述钳口一起可围绕第一轴旋转的末端工具钳口滑轮,并且形成为至少能够进行俯仰旋转和偏转旋转;钳口导线,其结合到所述末端工具钳口滑轮,从而随所述末端工具钳口滑轮的旋转移动;连接部,其朝一方向延伸,所述钳口导线穿过其内部,并且所述末端工具结合到其一端部;驱动部,其结合到所述连接部的另一端部,并且控制所述末端工具的所述俯仰旋转和所述偏转旋转,其中,所述驱动部包括:驱动部钳口滑轮,其形成为可围绕第二轴旋转,并且与所述钳口导线结合;驱动部中介滑轮,其形成为与所述驱动部钳口滑轮相邻,形成为可围绕位置被固定的轴自传,并且形成为使所述钳口导线的至少一部分缠绕在其上;以及驱动部卫星滑轮,其形成为与所述驱动部中介滑轮相邻,形成为可相对于所述驱动部中介滑轮相对移动,使得相对于所述驱动部中介滑轮的位置发生变化,并且形成为使所述钳口导线的至少一部分缠绕在其上,其中,所述钳口导线通过所述驱动部钳口滑轮的旋转来移动,从而使所述末端工具钳口滑轮和所述钳口旋转,从所述驱动部钳口滑轮中退绕出去的两股分支的所述钳口导线依次缠绕在所述驱动部中介滑轮、所述驱动部卫星滑轮和所述驱动部中介滑轮上之后向所述末端工具侧延伸,当所述驱动部卫星滑轮相对于所述驱动部中介滑轮相对移动时,所述驱动部中的所述钳口导线的总长度发生变化,从而使所述末端工具进行所述俯仰旋转。
5、有益效果
6、根据本发明,可以获得以下效果,补偿在俯仰动作时发生的钳口导线的移动,使得俯仰动作和偏转动作/致动动作独立且顺利地进行。
7、附图简单说明
8、图1为示出安装有根据本发明一实施例的多关节型手术装置的手术机器人系统的概念图。
9、图2为示出图1的手术机器人系统的内部组成的框图。
10、图3为示出图1的手术机器人系统的从机器人和安装在其上的多关节型手术装置的透视图。
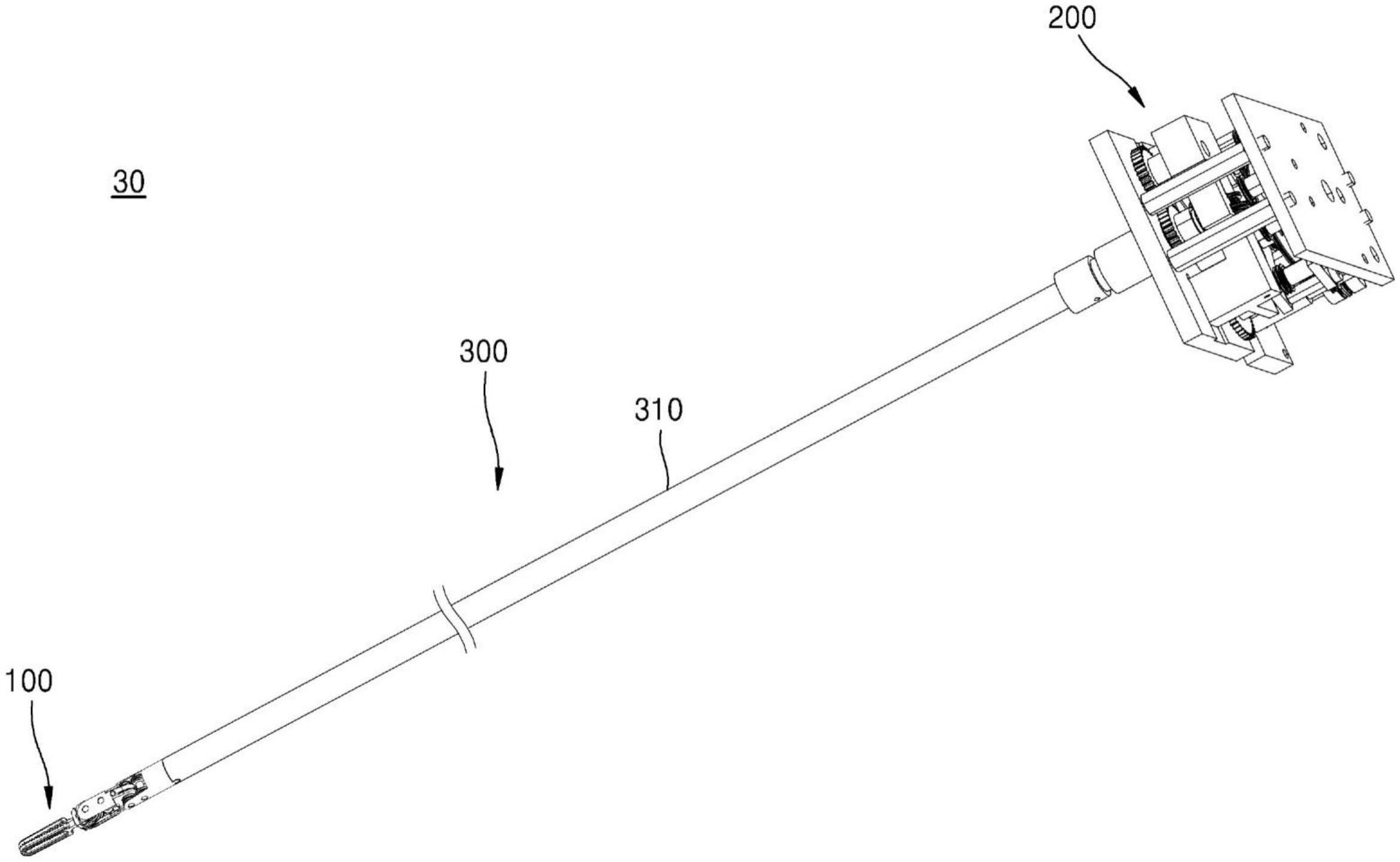
11、图4为示出根据本发明一实施例的多关节型手术装置的透视图。
12、图5和图6为图4的多关节型手术装置的末端工具的透视图。
13、图7为图4的多关节型手术装置的末端工具的平面图。
14、图8和图9为图4的多关节型手术装置的驱动部的透视图。
15、图10为图4的多关节型手术装置的驱动部的平面图。
16、图11为图4的多关节型手术装置的驱动部的背面图。
17、图12为图4的多关节型手术装置的驱动部的侧面图。
18、图13为分解示出图4所示的多关节型手术装置的滑轮和导线的组成中与第一钳口相关的组成的图。
19、图14为分解示出图4所示的多关节型手术装置的滑轮和导线的组成中与第二钳口相关的组成的图。
20、图15和图16为示出图4所示的多关节型手术装置的俯仰动作的图。
21、图17和图18为示出图4所示的多关节型手术装置的偏转动作的图。
22、图19和图20为示出根据本发明的第二实施例的多关节型手术装置的概念图。
23、图21为示出根据本发明的第三实施例的多关节型手术装置的概念图。
24、图22为示出图21的多关节型手术装置的俯仰动作的概念图。
25、图23为示出根据本发明的第四实施例的多关节型手术装置的概念图。
26、图24为示出图23的多关节型手术装置的俯仰动作的概念图。
27、图25为示出图23的多关节型手术装置的偏转动作的概念图。
28、图26为示出图23的多关节型手术装置同时进行俯仰动作和偏转动作的状态的概念图。
29、图27为示出图23的多关节型手术装置的致动动作的概念图。
30、图28为示出根据本发明的第五实施例的多关节型手术装置的概念图。
31、图29为示出图28的多关节型手术装置的俯仰动作的概念图。
32、图30为示出图28的多关节型手术装置的偏转动作的概念图。
33、图31为示出图28的多关节型手术装置同时进行俯仰动作和偏转动作的状态的概念图。
34、图32为示出图28的多关节型手术装置的致动动作的概念图。
35、图33为示出对根据本发明一实施例的多关节型手术装置的俯仰动作补偿的概念图。
36、最佳模式
37、根据本发明一实施例提供一种多关节型手术装置,其特征在于,包括:末端工具,其包括一个或多个钳口以及形成为与所述钳口结合且与所述钳口一起可围绕第一轴旋转的末端工具钳口滑轮,并且形成为至少能够进行俯仰旋转和偏转旋转;钳口导线,其结合到所述末端工具钳口滑轮,从而随所述末端工具钳口滑轮的旋转移动;连接部,其朝一方向延伸,所述钳口导线穿过其内部,并且所述末端工具结合到其一端部;驱动部,其结合到所述连接部的另一端部,并且控制所述末端工具的所述俯仰旋转和所述偏转旋转,其中,所述驱动部包括:驱动部钳口滑轮,其形成为可围绕第二轴旋转,并且与所述钳口导线结合;驱动部中介滑轮,其形成为与所述驱动部钳口滑轮相邻,形成为可围绕位置被固定的轴自传,并且形成为使所述钳口导线的至少一部分缠绕在其上;以及驱动部卫星滑轮,其形成为与所述驱动部中介滑轮相邻,形成为可相对于所述驱动部中介滑轮相对移动,使得相对于所述驱动部中介滑轮的位置发生变化,并且形成为使所述钳口导线的至少一部分缠绕在其上,其中,所述钳口导线通过所述驱动部钳口滑轮的旋转来移动,从而使所述末端工具钳口滑轮和所述钳口旋转,从所述驱动部钳口滑轮中退绕出去的两股分支的所述钳口导线依次缠绕在所述驱动部中介滑轮、所述驱动部卫星滑轮和所述驱动部中介滑轮上之后向所述末端工具侧延伸,当所述驱动部卫星滑轮相对于所述驱动部中介滑轮相对移动时,所述驱动部中的所述钳口导线的总长度发生变化,从而使所述末端工具进行所述俯仰旋转。
38、根据本发明一实施例,其进一步包括:驱动部俯仰滑轮,其布置为与所述驱动部钳口滑轮相邻,并且形成为可围绕与所述第二轴不同的第三轴旋转,其中,所述驱动部卫星滑轮形成为可相对于所述驱动部俯仰滑轮相对移动,从而能够形成为当所述驱动部俯仰滑轮旋转时,所述驱动部卫星滑轮相对于所述驱动部俯仰滑轮的相对位置发生变化。
39、根据本发明一实施例,所述驱动部俯仰滑轮和所述驱动部中介滑轮的相对位置可以保持恒定。
40、根据本发明一实施例,当所述驱动部俯仰滑轮旋转时,所述驱动部卫星滑轮可以与所述驱动部俯仰滑轮联动地移动。
41、根据本发明一实施例,当所述驱动部俯仰滑轮围绕所述第三轴旋转时,所述驱动部卫星滑轮相对于所述驱动部俯仰滑轮相对移动,从而能够使所述驱动部中的所述钳口导线的总长度发生变化。
42、根据本发明一实施例,由所述驱动部俯仰滑轮的旋转引起的所述驱动部中的所述钳口导线的总长度变化,也可以使所述末端工具中的所述钳口导线的总长度发生变化。
43、根据本发明一实施例,即使通过所述驱动部俯仰滑轮的旋转来改变所述驱动部中的所述钳口导线的总长度,所述钳口导线的总长度也可以保持恒定。
44、根据本发明一实施例,其可以进一步包括:末端工具钳口俯仰主滑轮,其形成为与所述末端工具钳口滑轮相邻,并且形成为可围绕与所述第一轴不同的第四轴旋转;以及末端工具钳口俯仰副滑轮,其形成为与所述末端工具钳口俯仰主滑轮相邻,并且形成为可围绕与所述第一轴不同的第五轴旋转。
45、根据本发明一实施例,当所述末端工具进行俯仰旋转时,从所述末端工具钳口滑轮中退绕出去后经过所述末端工具钳口俯仰主滑轮和所述末端工具钳口俯仰副滑轮的所述钳口导线的两股分支可以向相同方向同时移动。
46、根据本发明一实施例,以垂直于所述第一轴且包括所述第四轴的一平面为准,从所述末端工具钳口滑轮中退绕出去的两股分支的所述钳口导线可以相对于所述一平面布置在同一侧。
47、根据本发明一实施例,所述钳口包括第一钳口和第二钳口,所述末端工具钳口滑轮包括与所述第一钳口结合的末端工具第一钳口滑轮和与所述第二钳口结合的末端工具第二钳口滑轮,所述钳口导线可以包括结合到所述末端工具第一钳口滑轮的第一钳口导线和结合到所述末端工具第二钳口滑轮的第二钳口导线。
48、根据本发明一实施例,以垂直于所述第一轴且包括所述第四轴的平面为准,从所述末端工具第一钳口滑轮中退绕出去的两股分支的所述第一钳口导线相对于所述平面布置在任意一侧,从所述末端工具第二钳口滑轮中退绕出去的两股分支的所述第二钳口导线可以相对于所述平面布置在另一侧。
49、根据本发明一实施例,所述钳口导线可以形成为依次与所述末端工具钳口滑轮、末端工具钳口俯仰主滑轮和所述末端工具钳口俯仰副滑轮接触。
50、根据本发明一实施例,其可以进一步包括:末端工具俯仰滑轮,其布置为与所述末端工具钳口滑轮相邻,并且形成为可围绕所述第四轴或所述第五轴旋转;以及俯仰导线,其分别结合到所述末端工具俯仰滑轮和所述驱动部俯仰滑轮,从而连接所述末端工具俯仰滑轮和所述驱动部俯仰滑轮。
51、根据本发明一实施例,所述驱动部俯仰滑轮的旋转量和所述末端工具俯仰滑轮的旋转量可以是实质上相同的。
52、根据本发明一实施例,(所述末端工具俯仰滑轮的直径:所述末端工具钳口俯仰主滑轮的直径)和(所述驱动部俯仰滑轮的直径:所述驱动部中介滑轮的直径)可以是实质上相同的。
53、根据本发明一实施例,当所述驱动部俯仰滑轮以与第一角度相同的角度自传时,所述驱动部卫星滑轮以与所述第一角度相同的角度公转,当所述驱动部俯仰滑轮以与所述第一角度相同的角度自传时,所述末端工具俯仰滑轮和所述末端工具钳口俯仰主滑轮可以以与第二角度相同的角度旋转。
54、根据本发明一实施例,所述驱动部中介滑轮包括驱动部第一中介滑轮和驱动部第二中介滑轮,所述钳口导线可以依次经过所述驱动部第一中介滑轮、所述驱动部卫星滑轮和所述驱动部第二中介滑轮。
55、根据本发明一实施例,当所述驱动部俯仰滑轮旋转时,所述钳口导线从所述驱动部第一中介滑轮的进入地点经过所述驱动部卫星滑轮后到退出所述驱动部第二中介滑轮地点的路径长度可以发生变化。
56、根据本发明一实施例,当所述驱动部俯仰滑轮旋转时,在连接所述末端工具钳口滑轮和所述驱动部钳口滑轮的所述钳口导线的布置路径上,从所述钳口导线第一次与所述驱动部中介滑轮接触的地点到所述钳口导线最后与所述驱动部中介滑轮接触的地点的所述钳口导线的路径长度可以发生变化。
57、根据本发明一实施例,所述驱动部第一中介滑轮的直径可以与所述驱动部第二中介滑轮的直径相同。
58、根据本发明一实施例,所述驱动部第一中介滑轮的直径可以与所述驱动部第二中介滑轮的直径不同。
59、根据本发明一实施例,所述驱动部中介滑轮的直径可以为所述驱动部第一中介滑轮的直径与所述驱动部第二中介滑轮的直径之和。
60、根据本发明一实施例,所述驱动部中介滑轮形成为可围绕所述第三轴自传,所述驱动部卫星滑轮可以形成为可围绕所述第三轴公转。
61、根据本发明一实施例,当所述驱动部俯仰滑轮围绕所述第三轴自传时,与所述驱动部俯仰滑轮连接的所述驱动部卫星滑轮围绕所述第三轴公转,使得所述驱动部中的所述钳口导线的总长度能够发生变化。
62、根据本发明一实施例,当所述驱动部俯仰滑轮围绕所述第三轴旋转时,在所述驱动部卫星滑轮的旋转轴与所述第三轴间隔开一定距离的情况下,在所述驱动部卫星滑轮的旋转轴与所述第三轴保持一定距离的同时,整个所述驱动部卫星滑轮可以围绕所述第三轴旋转。
63、根据本发明一实施例,其进一步包括俯仰-偏转连接器,其形成为与所述驱动部俯仰滑轮一起围绕所述第三轴旋转,其中,所述驱动部卫星滑轮可以形成在所述俯仰-偏转连接器的至少一端部。
64、根据本发明一实施例,所述俯仰-偏转连接器形成为使得两个或多个延伸部从中心延伸,并且驱动部卫星滑轮的中心轴可以形成在所述每个延伸部中至少一部分的端部。
65、根据本发明一实施例,所述俯仰-偏转连接器刚性连接所述驱动部俯仰滑轮和所述驱动部卫星滑轮,从而当所述驱动部俯仰滑轮围绕所述第三轴自传时,所述驱动部卫星滑轮可以围绕所述第三轴公转。
66、根据本发明一实施例,当所述驱动部卫星滑轮围绕所述第三轴公转时,缠绕在所述驱动部中介滑轮上的所述钳口导线的长度可以发生变化。
67、根据本发明一实施例,其可以进一步包括:驱动部俯仰齿轮,其形成为与所述驱动部俯仰滑轮一起围绕所述第三轴旋转;以及补偿齿轮,其形成在所述驱动部俯仰齿轮的一侧以与所述驱动部俯仰齿轮啮合。
68、根据本发明一实施例,当所述驱动部俯仰滑轮进行旋转运动时,形成为与所述驱动部俯仰齿轮啮合的所述补偿齿轮可以进行直线运动。
69、根据本发明一实施例,所述驱动部卫星滑轮布置在所述补偿齿轮上,使得所述驱动部卫星滑轮能够与所述补偿齿轮一起进行直线运动。
70、根据本发明一实施例,即使所述驱动部卫星滑轮进行直线移动,缠绕在所述驱动部中介滑轮上的所述钳口导线的长度也可以保持恒定。
71、根据本发明一实施例,所述补偿齿轮执行一种齿条的功能,并且所述驱动部俯仰齿轮可以执行一种小齿轮的功能。
72、根据本发明一实施例,即使所述驱动部钳口滑轮旋转,所述驱动部中的所述钳口导线的总长度也可以保持恒定。
73、根据本发明一实施例,所述钳口导线可以分别与所述末端工具钳口滑轮和所述驱动部钳口滑轮结合,从而在整体上形成闭环。
74、根据本发明一实施例,所述驱动部中介滑轮和所述驱动部卫星滑轮都可以成对形成,使得从所述驱动部钳口滑轮中退绕出去的两股分支的所述钳口导线分别缠绕在其上。
75、根据本发明一实施例,所述偏转旋转为所述末端工具钳口滑轮围绕所述第一轴自传的动作,所述俯仰旋转可以为所述末端工具钳口滑轮围绕与所述第一轴不同的第四轴公转的动作。
76、根据本发明另一实施例提供一种多关节型手术装置,其特征在于,包括:末端工具,其包括一个或多个末端工具滑轮,并且形成为至少能够进行俯仰旋转;导线,其结合到所述末端工具滑轮,从而随所述末端工具滑轮的旋转移动;连接部,其朝一方向延伸,所述导线穿过其内部,并且所述末端工具结合到其一端部;驱动部,其结合到所述连接部的另一端部,并且控制所述末端工具的所述俯仰旋转,其中,所述驱动部包括:驱动部驱动滑轮,其形成为可围绕第二轴旋转,并且与所述导线结合;驱动部中介滑轮,其形成为与所述驱动部驱动滑轮相邻,形成为可围绕位置被固定的轴自传,并且形成为使所述导线的至少一部分缠绕在其上;以及驱动部卫星滑轮,其形成为与所述驱动部中介滑轮相邻,形成为可相对于所述驱动部中介滑轮相对移动,使得相对于所述驱动部中介滑轮的位置发生变化,并且形成为使所述导线的至少一部分缠绕在其上,其中,所述导线通过所述驱动部驱动滑轮的旋转来移动,从而使所述末端工具滑轮旋转,从所述驱动部驱动滑轮中退绕出去的两股分支的所述导线依次缠绕在所述驱动部中介滑轮、所述驱动部卫星滑轮和所述驱动部中介滑轮上之后向所述末端工具侧延伸,当所述驱动部卫星滑轮相对于所述驱动部中介滑轮相对移动时,所述驱动部中的所述导线的总长度发生变化,从而使所述末端工具进行所述俯仰旋转。
77、从以下附图、权利要求书和
技术实现要素:
中,将明确上述内容以外的其他方面、特征和优点。
- 还没有人留言评论。精彩留言会获得点赞!