用于微型机器人的光推进的制作方法
本发明涉及一种具有推进系统的微型机器人,更具体地说,是一种用于在人体内导航的光诱导推进系统。
背景技术:
1、在微创手术中,尤其是在神经外科手术中,能够在不损伤的情况下到达深层和功能性结构是主要的挑战。多亏了微型技术,将完全自主的微型机器人送入受试者的器官(如大脑)成为可能。然而,在低雷诺数的环境中(如在大脑中)推进微型机器人是一项挑战,因为微型机器人的体积小,缺乏惯性,并且存在相对较高的阻力。另一项重要的要求是,微型机器人应该能够在器官中移动,同时尽可能地限制其通过对器官造成的生理损伤。
2、在这种情况下,本发明旨在提出一种微型机器人,该机器人在低雷诺数的流体环境或粘弹性固体中具有高效的推进机构,同时尽可能保持其移动的环境的完整性。
3、这就需要有一种尽可能轻、尽可能小的微型机器人,从而引入最少数量的元件和部件以及非常简单的机构。
技术实现思路
1、本发明旨在解决这一问题,因此其涉及一种微型机器人,该微型机器人被配置为在粘性或粘弹性导航材料中移动,特别是在受试者的身体内部移动,该微型机器人包括:
2、-头部和后部,以及
3、-推进系统,
4、其中该推进系统包括:
5、-推进结构,该推进结构包括连接头部和后部的可变形部分,该可变形部分能够沿着连接头部和后部的主轴线进行伸长/收缩变形,
6、-致动器或致动区,其被配置为依次致动可变形部分的伸长/收缩循环,
7、-光源,该光源旨在被激活时发射至少一种预定的光信号,
8、-远程控制单元,
9、其中
10、-光源包括光纤,
11、-光源被配置为由远程控制单元激活,特别是从受试者的身体外部激活,以及
12、-致动器或致动区被配置成由光源所发射的光信号激活,该光信号因此依次致动所述可变形部分的伸长/收缩循环,微型机器人因此由光推进驱动。
13、因此,该解决方案实现了上述目的。特别地,它允许获得具有展现非常高体积功率(结构的功率除以其体积)的推进力的非常小的微型机器人,因为在这些尺寸下,光活性材料的物理和机械性能明显优于现有技术提供的解决方案(如使用磁体和线圈的电磁电机)。本发明还允许获得一种使用和操作非常简单的微型机器人,该微型机器人以光作为推进以及可能用于操纵的单一能源,表现出改进的稳健性,不需要求助于其他能源,例如使用线圈和磁体的电磁装置的电能。
14、根据本发明的装置可以包括以下特征中的一个或更多个,这些特征彼此独立或相互结合:
15、-可变形部分可以是在3d维度上延伸的体积结构,所述可变形部分被设计成,至少当可变形部分处于其伸长状态时,允许任何光信号在任何方向上通过其扩散,
16、-可变形部分在被致动器或致动区激活时的收缩可以阻止光源所发射的光信号到达致动器或致动区,从而导致致动器或致动区的失活并因此导致可变形部分的伸长,
17、-光源直接连接到微型机器人,
18、-微型机器人和光源之间的连接可以是气密连接,
19、-光纤可以包括至少一个传感器,以便感测沿着所述光纤行进的光信号,
20、-所述至少一个传感器可以与远程控制单元通信,以便根据每个致动器或致动区所接收的光信号来调制所发射的光信号,
21、-致动器或致动区可以包括光聚焦元件,以便聚焦所发射的光信号,
22、-推进系统还可以包括操纵系统,推进结构因此包括连接到头部和后部的至少一个操纵元件,所述至少一个操纵元件可由光源发射的光信号激活,
23、-所述至少一个操纵元件可以沿着可变形部分延伸,
24、-所述至少一个操纵元件可以是可变形部分的一部分,
25、-该系统还可以包括光调度装置,所述光调度装置由远程控制单元控制,以便在致动器或致动区、所述至少一个操纵元件和任何另外的光可激活元件之间调度由光源所发射的光,
26、-能够激活致动器或致动区的光信号的电磁特性和能够激活所述至少一个操纵元件的光信号电磁特性可以彼此不同,
27、-推进结构可以包括几个操纵元件,每个操纵元件可由具有特定电磁特性组的光信号激活,每组电磁特性彼此不同,
28、-该系统还可以包括外部锚固元件,所述外部锚固元件旨在固定到受试者的身体的外表面,光源和微型机器人连接到外部锚固元件。
技术特征:
1.一种微型机器人,其被配置为在粘性或粘弹性导航材料中移动,特别是在受试者的身体内部移动,所述微型机器人(12)包括:
2.根据权利要求1所述的微型机器人(12),其中,所述可变形部分(20)是在3d维度上延伸的体积结构,所述可变形部分(20)被设计成,至少当所述可变形部分(20)处于其伸长状态时,允许任何光信号在任何方向上通过其扩散。
3.根据前述权利要求中任一项所述的微型机器人(12),其中,所述可变形部分(20)在被所述致动器或致动区(22)激活时的收缩阻止所述光源(14)所发射的光信号到达所述致动器或致动区(22),从而导致所述致动器或致动区(22)的失活,并因此导致所述可变形部分(20)的伸长。
4.根据前述权利要求中任一项所述的微型机器人(12),其中,所述光源(14)直接连接到所述微型机器人(12)。
5.根据前一权利要求所述的微型机器人(12),其中,所述微型机器人(12)和所述光源(14)之间的连接是气密连接。
6.根据前述权利要求中任一项所述的微型机器人(12),其中,所述光纤(24)包括至少一个传感器,以便感测沿着所述光纤(24)行进的光信号。
7.根据前一权利要求所述的微型机器人(12),其中,所述至少一个传感器与所述远程控制单元(16)通信,以便根据每个致动器或致动区(22)所接收的光信号对所发射的光信号进行调制。
8.根据权利要求1至6中任一项所述的微型机器人(12),其中,所述致动器或致动区(22)包括光聚焦元件(28),以便聚焦所发射的光信号。
9.根据前述权利要求中任一项所述的微型机器人(12),其中所述推进系统(18)还包括操纵系统(30),所述推进结构(18)因此包括连接到所述头部(18a)和所述后部(18b)的至少一个操纵元件(32),所述至少一个操纵元件(32)能被所述光源(14)所发射的光信号激活。
10.根据前一权利要求所述的微型机器人(12),其中,所述至少一个操纵元件(32)沿着所述可变形部分(20)延伸。
11.根据权利要求9所述的微型机器人(12),其中,所述至少一个操纵元件(32)是所述可变形部分(20)的一部分。
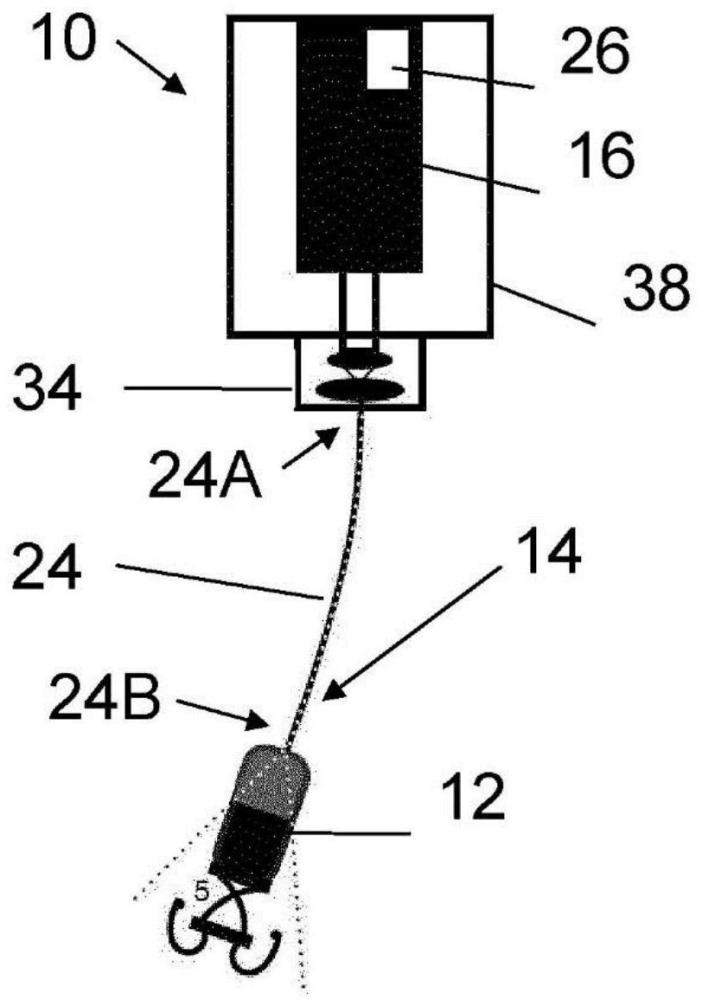
12.根据前一权利要求所述的微型机器人(12),其中,所述系统(10)还包括光调度装置(34),所述光调度装置(34)由所述远程控制单元(16)控制,以便在所述致动器或致动区(22)、所述至少一个操纵元件(32)和任何另外的光可激活元件之间调度由所述光源(14)所发射的光。
13.根据权利要求11所述的微型机器人(12),其中,能够激活所述致动器或致动区(22)的光信号的电磁特性和能够激活所述至少一个操纵元件(32)的光信号的电磁特性彼此不同。
14.根据前一权利要求所述的微型机器人(12),其中,所述推进结构(18)包括几个操纵元件(32),每个操纵元件(32)能由具有特定电磁特性组的光信号激活,每组电磁特性彼此不同。
15.根据前述权利要求中任一项所述的微型机器人(12),其中,所述系统(10)还包括外部锚固元件(38),所述外部锚固元件(38)旨在固定到所述受试者的身体的外表面,所述光源(14)和所述微型机器人(12)连接到所述外部锚固元件(38)。
技术总结
本发明涉及一种微型机器人,该微型机器人包括:推进系统(10),该推进系统具有可沿主轴线伸长/收缩变形的推进结构;致动器或致动区,被配置为依次致动推进结构的伸长/收缩循环;光源(14),当被激活时旨在发射至少一种预定的光信号;以及远程控制单元(16)。光源(14)包括光纤(24),并且配置为被远程控制单元(16)激活,并且致动器或致动区被配置为被光源(14)所发射的光信号激活。
技术研发人员:伯特兰·迪普拉,昆廷·弗朗索瓦,阿里·乌尔马斯
受保护的技术使用者:罗宝蒂公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!