软式内镜操控机器人系统的制作方法
本发明涉及医疗机器人,更具体地说,涉及一种软式内镜操控机器人系统。
背景技术:
1、消化道、呼吸道等自然腔道是人类常见疾病好发部位,由于病灶处于人体自然腔道内部,因此需要通过软式内镜进行检查或手术治疗。
2、传统的软式内镜检查或手术,需要人双手配合持镜体、操作旋钮、手工输送镜体等动作完成操作过程;有的检查或手术需要在放射线的图像引导下进行,医务人员需要穿戴沉重的铅制防护服等长时间手工操作软式内镜,对医务人员诊疗操作质量、体力和健康影响较大,尤其对经验丰富的年长或女性医务人员制约更大,甚至被迫放弃软式内镜工作。
3、随着机器人辅助技术的发展,机器人和数字化技术在医院的应用愈显突出。医生可以通过调节手柄开关和按钮就可以调节软式内镜的输送长度和姿态,可以大大降低医生的体力和手工操作疲劳,降低手术的操作要求,减少对医务人员的辐射,同时可以提高医务人员与影像之间的交互。同时利用远程医疗方式,发挥大城市、大医学中心优异的疾病诊断治疗能力,缓解我国医疗资源分布不均的现状。
4、但现有的机器人系统无法完全覆盖软式内镜检查、活检与治疗要求,仍然需要大量医务人员介入,比如机器人系统无法操作活检钳等。又比如胶囊型机器人仅能实现简单的软式内镜检查。
技术实现思路
1、有鉴于此,本发明提供了一种软式内镜操控机器人系统,以软式内镜的自动化控制要求。
2、为了达到上述目的,本发明提供如下技术方案:
3、一种软式内镜操控机器人系统,用于对软式内镜手术的远距离操控,包括对所述软式内镜执行手术操控的台车,对所述台车发出操控指令的医生端控制台;
4、所述台车上布置有对软式内镜的操作部进行功能控制的第一机械臂,和对所述软式内镜的头端部进行输送操控的第二机械臂;
5、所述第二机械臂的末端安装有对所述头端部进行输送的输送装置,所述第一机械臂的末端安装有驱动所述操作部动作的操作装置。
6、优选地,在上述软式内镜操控机器人系统中,所述台车包括台车主体,对所述台车主体进行支撑和行走移动的台车底盘,沿高度方向伸出于所述台车主体的台车立柱,所述台车立柱上固定有第一直线导轨模组和第二直线导轨模组,所述第一机械臂安装于所述第一直线导轨模组上,所述第二机械臂安装于所述第二直线导轨模组上。
7、优选地,在上述软式内镜操控机器人系统中,所述第一机械臂和所述第二机械臂均是由多个臂件组成的多自由度机械臂,相邻的所述臂件之间布置有模块电机。
8、优选地,在上述软式内镜操控机器人系统中,所述输送装置包括输送驱动器、输送耗材和润滑模块,所述输送驱动器的中部具有输送所述软式内镜的输送通道,所述输送耗材设于所述输送驱动器的输出端,所述输送耗材和所述输送驱动器的对接端面上设置对所述输送耗材进行输送动力传递的对接轴。
9、优选地,在上述软式内镜操控机器人系统中,所述输送耗材上设置弹性卡扣,所述输送驱动器上设置对接孔,所述弹性卡扣卡装配合于所述对接孔内。
10、优选地,在上述软式内镜操控机器人系统中,所述输送耗材包括刮粘液结构和润滑液注射模块,所述润滑液注射模块随所述软式内镜的输送,在所述软式内镜的外表面涂抹润滑液;所述刮粘液结构在所述软式内镜抽出过程中,对其表面粘液进行刮除。
11、优选地,在上述软式内镜操控机器人系统中,所述操作装置包括对所述软式内镜进行操作的内镜操作装置,和
12、对所述软式内镜进行操作的同时,同步对所述软式内镜配套的器械进行操作的器械操作装置;
13、还包括对所述内镜操作装置和所述器械操作装置进行连接和固定的操作部基座。
14、优选地,在上述软式内镜操控机器人系统中,所述内镜操作装置包括对所述软式内镜的操作部进行适配安装的适配器,以及驱动所述适配器对所述软式内镜上的功能按钮执行手术操作的驱动结构;
15、优选地,在上述软式内镜操控机器人系统中,还包括连工作站,其上设置对所述软式内镜的镜下视野图像进行传输的内镜工作站、视频监测系统和提供高频电的高频电工作站;
16、所述视频监测系统包括由所述医生控制台发出控制命令至所述台车,按需求读取所述工作站发出的原始图像或所述台车处理后的第一融合图像;
17、或由所述医生端控制台发出控制命令至所述台车,按需求读取所述工作站发出的原始图像和所述台车的状态信息,并与所述医生端控制台操作信息融合输出融合后的第二融合图像。
18、一种软式内镜远程手术机器人系统,应用于如上任一项所述的软式内镜操控机器人系统,包括对软式内镜执行远程操控的医生端远程控制中心,和设于所述软式内镜操控机器人系统的台车内,对所述医生端远程控制中心和所述台车进行通信服务的服务器,所述服务器内设置对所述台车获取的图像数据、语音数据、指令或状态数据进行网络传输的通信系统。
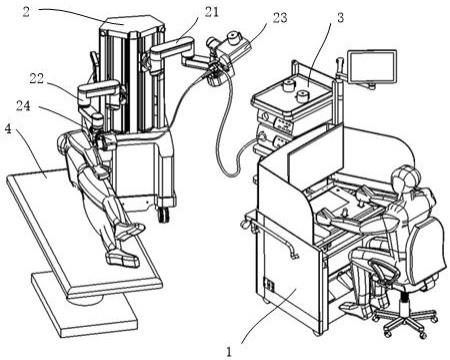
19、本发明提供的软式内镜操控机器人系统,用于对软式内镜手术的远距离操控,包括对软式内镜执行手术操控的台车,对台车发出操控指令的医生端控制台;台车上布置有对软式内镜的头端部进行输送操控的第二机械臂,和对软式内镜的操作部进行功能控制的第一机械臂;第二机械臂的末端安装有对头端部进行输送的输送装置,第一机械臂的末端安装有驱动操作部动作的操作装置。台车位于手术侧,靠近手术台布置,医生端控制台可远离手术侧,台车由其上的第一机械臂和第二机械臂,分别对软式内镜的操作部和头端部进行夹持和功能操控,第二机械臂的末端设置输送装置,将头端部输送至手术位置,第一机械臂对软式内镜的操作部进行功能控制,实现软式内镜的不同手术控制,通过医生端控制台对台车的远距离控制,实现由机器人系统对软式内镜的输送和手术操作,满足软式内镜的自动化控制。
技术特征:
1.一种软式内镜操控机器人系统,用于对软式内镜手术的远距离操控,其特征在于,包括对所述软式内镜执行手术操控的台车,对所述台车发出操控指令的医生端控制台;
2.根据权利要求1所述的软式内镜操控机器人系统,其特征在于,所述台车包括台车主体,对所述台车主体进行支撑和行走移动的台车底盘,沿高度方向伸出于所述台车主体的台车立柱,所述台车立柱上固定有第一直线导轨模组和第二直线导轨模组,所述第一机械臂安装于所述第一直线导轨模组上,所述第二机械臂安装于所述第二直线导轨模组上。
3.根据权利要求1所述的软式内镜操控机器人系统,其特征在于,所述第一机械臂和所述第二机械臂均是由多个臂件组成的多自由度机械臂,相邻的所述臂件之间布置有模块电机。
4.根据权利要求1所述的软式内镜操控机器人系统,其特征在于,所述输送装置包括输送驱动器、输送耗材和润滑模块,所述输送驱动器的中部具有输送所述软式内镜的输送通道,所述输送耗材设于所述输送驱动器的输出端,所述输送耗材和所述输送驱动器的对接端面上设置对所述输送耗材进行输送动力传递的对接轴。
5.根据权利要求4所述的软式内镜操控机器人系统,其特征在于,所述输送耗材上设置弹性卡扣,所述输送驱动器上设置对接孔,所述弹性卡扣卡装配合于所述对接孔内。
6.根据权利要求5所述的软式内镜操控机器人系统,其特征在于,所述输送耗材包括刮粘液结构和润滑液注射模块,所述润滑液注射模块随所述软式内镜的输送,在所述软式内镜的外表面涂抹润滑液;所述刮粘液结构在所述软式内镜抽出过程中,对其表面粘液进行刮除。
7.根据权利要求1所述的软式内镜操控机器人系统,其特征在于,所述操作装置包括对所述软式内镜进行操作的内镜操作装置,和
8.根据权利要求7所述的软式内镜操控机器人系统,其特征在于,所述内镜操作装置包括对所述软式内镜的操作部进行适配安装的适配器,以及驱动所述适配器对所述软式内镜上的功能按钮执行手术操作的驱动结构。
9.根据权利要求1-8任一项所述的软式内镜操控机器人系统,其特征在于,还包括工作站,其上设置对所述软式内镜的镜下视野图像进行传输的内镜工作站、视频监测系统和提供高频电的高频电工作站;
10.一种软式内镜远程手术机器人系统,其特征在于,应用于如权利要求1-9任一项所述的软式内镜操控机器人系统,包括对软式内镜执行远程操控的医生端远程控制中心,和设于所述软式内镜操控机器人系统的台车内,对所述医生端远程控制中心和所述台车进行通信服务的服务器,所述服务器内设置对所述台车获取的图像数据、语音数据、指令或状态数据进行网络传输的通信系统。
技术总结
本发明提供了一种软式内镜操控机器人系统,包括对软式内镜执行手术操控的台车,对台车发出操控指令的医生端控制台;台车上布置有对软式内镜的头端部进行输送操控的第二机械臂,和对软式内镜的操作部进行功能控制的第一机械臂;台车位于手术侧,靠近手术台布置,医生端控制台可远离手术侧,台车由其上的第一机械臂和第二机械臂,分别对软式内镜的操作部和头端部进行夹持和功能操控,第二机械臂的末端设置输送装置,将头端部输送至手术位置,第一机械臂对软式内镜的操作部进行功能控制,实现软式内镜的不同手术控制,通过医生端控制台对台车的远距离控制,实现由机器人系统对软式内镜的输送和手术操作,满足软式内镜的自动化控制。
技术研发人员:请求不公布姓名
受保护的技术使用者:北京云力境安科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!