可更换冷粘旋切活检系统的制作方法
本公开涉及医疗,尤其涉及一种可更换冷粘旋切活检系统、方法及控制系统。
背景技术:
1、医疗机器人是机器人在所使用的医学。它们包括外科手术机器人。在大多数遥控操纵器中,这些操纵器在一侧使用外科医生的激活器来控制另一侧的“执行器”。手术机器人比人为的外科医生能够以更高的精度进行手术,或可以在没有人外科医生的情况下进行远程手术。
2、采用机器人进行活检取样诊疗,是活检取样病患人员的福音。通过机器人携带可更换冷粘旋切活检针(即活检针)对活检取样位置进行治疗,比如注射药物或者手术针。
3、其中,在活检取样诊疗手术中,可更换冷粘旋切活检针上的进针,需要控制住其进针方向和深度,而现有的机器人多为半自动或者认为操控的机器,智能化成程度不高,进针方向和深度需要人为控制。不能结合活检目标组织的三维空间数据,进行进针方向和深度的引导和控制,医疗效率低下。
技术实现思路
1、为了解决上述问题,本技术提出一种可更换冷粘旋切活检系统、控制方法及控制系统。
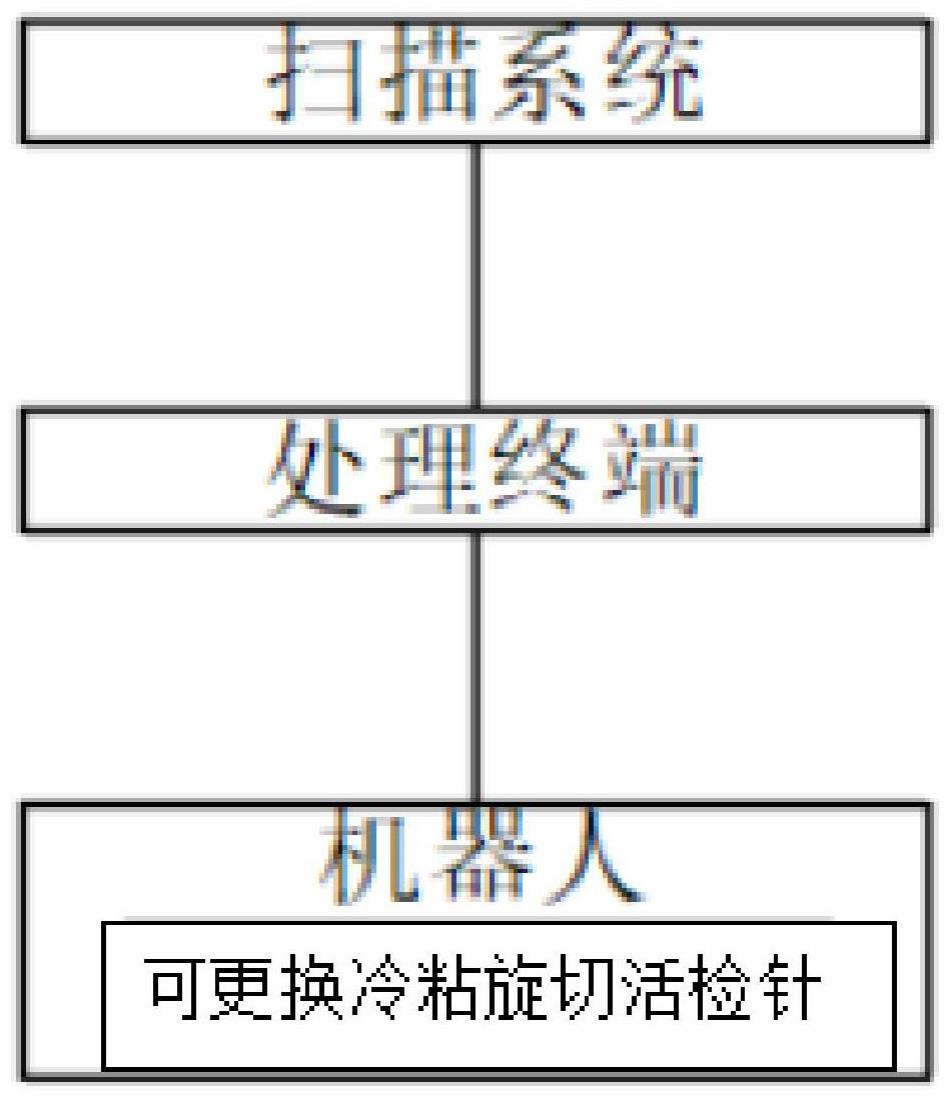
2、本技术一方面,提出一种可更换冷粘旋切活检系统,包括:
3、扫描系统,用于扫描获取并发送活检目标组织的三维深度扫描数据;
4、处理终端,用于获取所述三维深度扫描数据,根据所述三维深度扫描数据,建立并发送机器人到所述活检目标组织的进针方向和深度引导数据;
5、机器人,用于获取所述进针方向和深度引导数据,并根据所述进针方向和深度引导数据,进行运动;
6、可更换冷粘旋切活检针,设于所述机器人的机器臂末端,用于在所述机器人的进针方向和深度引导下,到达所述活检目标组织位置进行活检取样手术。
7、作为本技术的一种可选实施方案,可选地,所述扫描系统,包括:
8、安装支架,设于所述机器人一侧;
9、扫描探头,设于所述安装支架上,且对应所述活检目标组织所在的活检取样体表;
10、其中,所述扫描探头的数量至少为三个,均匀分布于所述活检目标组织所在活检取样体表的正对面。
11、作为本技术的一种可选实施方案,可选地,所述处理终端,包括:
12、接收端,用于获取所述三维深度扫描数据;
13、解析模块,用于根据预设解析规则对所述三维深度扫描数据进行解析,获得所述活检目标组织的三维空间坐标数据;
14、预处理模块,用于对所述三维空间坐标数据进行过滤和降噪处理,得到活检取样三维预处理数据。
15、作为本技术的一种可选实施方案,可选地,所述处理终端,还包括:
16、机器人进针方向数据建立模块,用于根据所述活检取样三维预处理数据,建立所述机器人到所述活检目标组织的进针方向数据;
17、机器人进针深度数据建立模块,用于根据所述活检取样三维预处理数据,建立所述机器人到所述活检目标组织的进针深度数据;
18、机器人坐标处理模块,用于获取所述机器人坐标,并将所述机器人坐标分别与所述进针方向数据和所述进针深度数据进行关联转换。
19、作为本技术的一种可选实施方案,可选地,所述机器人坐标处理模块,包括:
20、机器人坐标解析模块,用于根据解析规则对所述机器人坐标进行解析,获得所述机器人的坐标解析数据;
21、第一坐标关联模块,用于将所述坐标解析数据与所述进针方向数据进行关联转换,并保存至所述处理终端;
22、第二坐标关联模块,用于将所述坐标解析数据与所述进针深度数据进行关联转换,并保存至所述处理终端。
23、本技术另一方面,提出一种实现权利要求1-5中任一项所述的可更换冷粘旋切活检系统的方法,包括如下步骤:
24、s100、通过扫描系统扫描获取并发送活检目标组织的三维深度扫描数据至处理终端;
25、s200、所述处理终端接收所述三维深度扫描数据,根据所述三维深度扫描数据,建立并发送机器人到所述活检目标组织的进针方向和深度引导数据;
26、s300、机器人接收所述进针方向和深度引导数据,并根据所述进针方向和深度引导数据,进行运动;
27、s400、可更换冷粘旋切活检针在所述机器人的进针方向和深度引导下,到达所述活检目标组织位置进行活检取样手术。
28、作为本技术的一种可选实施方案,可选地,在步骤s200中,所述处理终端接收所述三维深度扫描数据,根据所述三维深度扫描数据,建立并发送机器人到所述活检目标组织的进针方向和深度引导数据,包括:
29、s210、获取所述三维深度扫描数据;
30、s220、根据预设解析规则对所述三维深度扫描数据进行解析,获得所述活检目标组织的三维空间坐标数据;
31、s230、对所述三维空间坐标数据进行过滤和降噪处理,得到活检取样三维预处理数据。
32、作为本技术的一种可选实施方案,可选地,在步骤s200中,所述处理终端接收所述三维深度扫描数据,根据所述三维深度扫描数据,建立并发送机器人到所述活检目标组织的进针方向和深度引导数据,还包括:
33、s211、根据所述活检取样三维预处理数据,建立所述机器人到所述活检目标组织的进针方向数据;
34、s221、根据所述活检取样三维预处理数据,建立所述机器人到所述活检目标组织的进针深度数据;
35、s231、获取所述机器人坐标,并将所述机器人坐标分别与所述进针方向数据和所述进针深度数据进行关联转换。
36、作为本技术的一种可选实施方案,可选地,在步骤s231中,获取所述机器人坐标,并将所述机器人坐标分别与所述进针方向数据和所述进针深度数据进行关联转换,包括:
37、s212、根据解析规则对所述机器人坐标进行解析,获得所述机器人的坐标解析数据;
38、s222、将所述坐标解析数据与所述进针方向数据进行关联转换,并保存至所述处理终端;
39、s232、将所述坐标解析数据与所述进针深度数据进行关联转换,并保存至所述处理终端。
40、本技术另一方面,还提出一种控制系统,包括:
41、处理器;
42、用于存储处理器可执行指令的存储器;
43、其中,所述处理器被配置为执行所述可执行指令时实现权利要求6至9中任意一项所述的实现所述可更换冷粘旋切活检系统的方法。
44、本发明的技术效果:
45、本技术通过扫描系统扫描获取并发送活检目标组织的三维深度扫描数据至处理终端;通过所述处理终端接收所述三维深度扫描数据,根据所述三维深度扫描数据,建立并发送机器人到所述活检目标组织的进针方向和深度引导数据;通过机器人接收所述进针方向和深度引导数据,并根据所述进针方向和深度引导数据,进行运动;实现可更换冷粘旋切活检针在所述机器人的进针方向和深度引导下,到达所述活检目标组织位置进行活检取样手术。能够基于活检目标组织的三维扫描数据,控制机器人带动可更换冷粘旋切活检针的进针方向和深度,能够实现活检取样诊疗的自动化治疗,节省医疗人力,提高医疗时效。
46、采用本技术的可更换冷粘旋切活检系统,能够实现智能化的活检操作,自动控制进针方向和深度,医疗效率高。
47、根据下面参考附图对示例性实施例的详细说明,本公开的其它特征及方面将变得清楚。
- 还没有人留言评论。精彩留言会获得点赞!