PCI手术导管、其递送系统及控制方法
本发明涉及智能医疗器械,更具体地,涉及一种pci手术导管、其递送系统及控制方法。
背景技术:
1、心血管介入(pci)手术是一种从周围血管插入导管并送至心脏及大血管各处的技术,可以用来实现临床电生理检查、开展某些心脏疾病的微创手术。在心脏跳动的情况下进行微创导管术对医生的技术要求非常高。医生在进行体内导管递送操作时,尤其是在细小血管及大角度转向递送时,对导管前端的递送精度要求非常高。对导管前端的递送非常容易导致医生的误操作,导致刺穿血管甚至损伤心脏组织。而且,现有血管介入器械的导管递送速度较慢,很可能导致患者错过最佳治疗时间,也使得血管介入手术时间大大延长,增加了患者和医护人员的辐射摄入。更重要的是,现有导管递送少有直接驱动导管头部的方式,这使得导管的头部运动精度不足,而且在大角度转向递送时,导管头部的控制较为复杂,操作难度很高。
2、由于pci导管具有体积微小的特殊性(导管的长度一般为15~20cm,直径一般为0.70~0.90mm),对其上的组件提出了小型化、低延时、高精度、抗干扰能力强等要求,因此,现有技术大多数采用线驱动和导管推送方式而无法直接引导导管头部来递送导管。然而,这些非直接引导导管头部的递送方式使得实现对导管的递送路径控制十分困难。目前有关的技术方案报道较少,是亟待解决的一个技术痛点。
技术实现思路
1、由于现有技术存在上述缺陷,本发明提供了一种pci手术导管、其递送系统及控制方法,基于无极性磁约束效应(polarity free magnetic repulsion,pfr)直接对导管头部进行驱动,形成一种手术导管的强约束、高精度、操作便利的小型化头部递送系统。
2、为实现上述目的,第一方面,本发明提供一种pci手术导管,包括导管本体,其特征在于,所述导管本体头部内包含磁约束浮动体;所述磁约束浮动体被所述导管本体头部柔性约束;所述磁约束浮动体为三层球体结构,包括刚性非金属外球壳、内嵌具有偶极矩的自由体的刚性非金属内球体、以及所述外球壳和内球体之间的层间填充物。
3、对所述导管的递送是基于所述磁约束浮动体牵引所述导管本体头部的移动,控制更灵活、更精准,可以实现导管头部的全自由度移动。相比于传统线约束控制,所述磁约束浮动体作为递送器件,无需占用除导管头部以外的其它空间,为手术所需的其余导管内器械留出了更多的空间,便于实现导管小型化。
4、优选地,所述导管本体头部内包括直径为0.70~0.90mm的光滑半球体,所述磁约束浮动体被柔性约束于所述半球体内;所述外球壳的外径为0.60~0.80mm,小于所述半球体的直径。
5、优选地,所述层间填充物包括高硬度、耐磨的球形微珠和微量润滑油剂;较佳地,所述微珠为直径0.10mm以下的球形氧化锆微珠。层间填充物起到消除内球体相对外球壳的旋转量、减小内外层球壳间的摩擦,使外球壳不随内球体旋转且其振动减小、运动状态更加稳定。球形氧化锆微珠具有很好的耐磨性、光滑度和硬度,故在缓冲所述内球体的旋转量过程中不易被损坏,且使得内外壳间力传递的平稳性好。
6、优选地,所述外球壳通过弹性体或软线与所述导管本体头部相连,使所述磁约束浮动体与导管本体内壁保持相对位置不超出约束范围,从而牵引导管本体的运动。
7、优选地,所述外球壳选用石墨烯或微晶陶瓷非金属球状外壳,可隔断所述内球体的旋转量,同时传递内外的侧向力。所述内球体选用硬度高的非金属球体;较佳地,所述内球体选用高硬度氮化硅陶瓷球体;所述具有偶极矩的自由体选用钕铁硼类强磁力偶极子。
8、第二方面,本发明提供一种pci手术导管的递送系统,其特征在于,包括上述的pci手术导管、以及体外可操作的电控旋转偶极子模块;所述电控旋转偶极子模块基于无极性磁斥力效应驱动所述磁约束浮动体移动,且始终与所述磁约束浮动体保持一定距离。
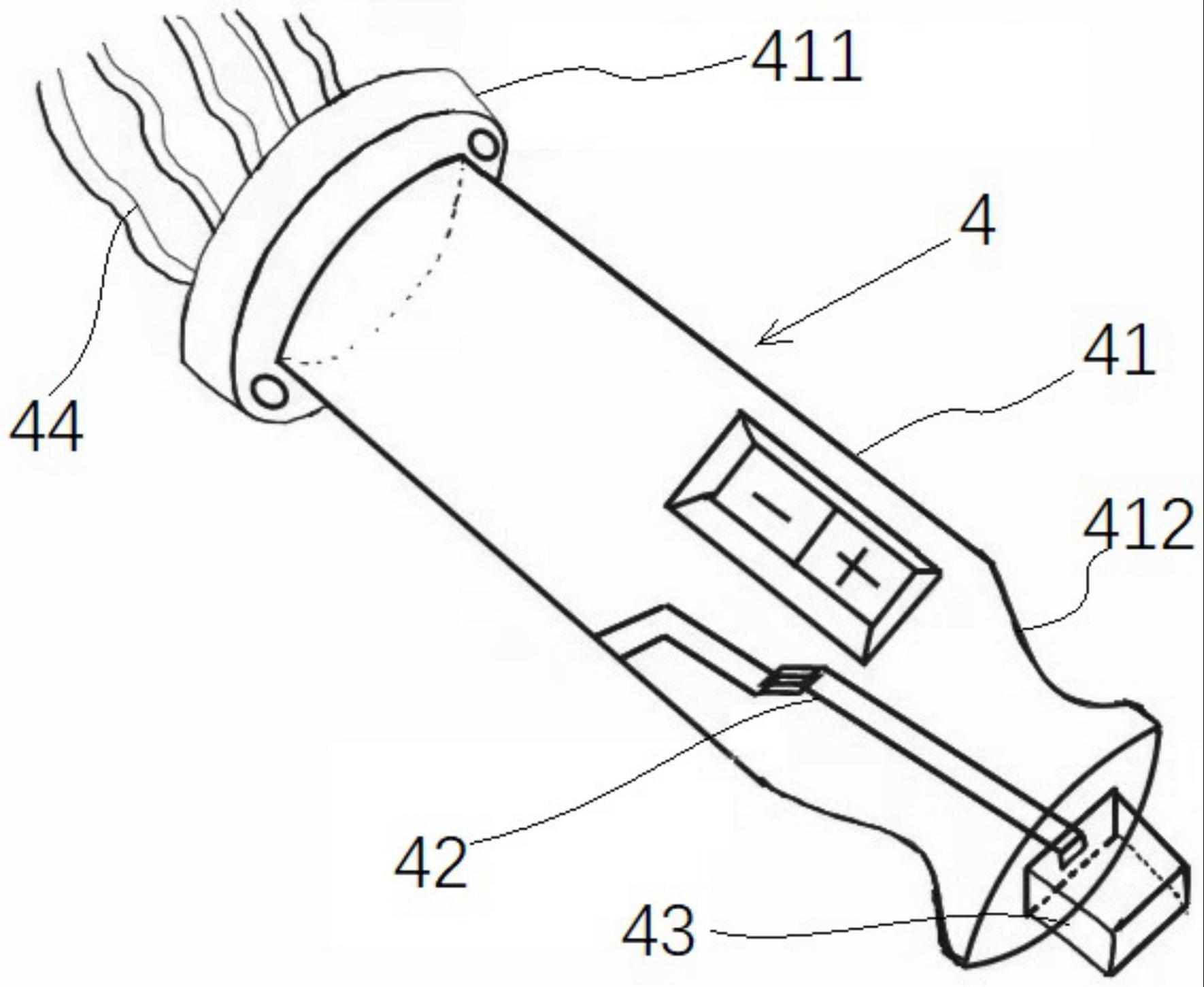
9、进一步地,所述电控旋转偶极子模块包括操作杆、压电负反馈模块、电控旋转偶极子、电源线、数据线、上位控制器;所述电控旋转偶极子可旋转且转速可调,固定于所述操作杆前端,用于驱动所述磁约束浮动体移动;所述压电负反馈模块包括一根与所述电控旋转偶极子固定连接的力传导压杆和压电传感器;所述力传导压杆将所述电控旋转偶极子的轴向受力传递到所述压电传感器上,所述压电传感器将压电信号经所述数据线传输给所述上位控制器进行判断和控制;所述电源线供给所述电控旋转偶极子、压电负反馈模块的电力。
10、优选地,所述操作杆是可拆卸式笔状操作杆,包括可固定底座和笔状握杆;所述可拆卸式笔状操作杆可以通过所述可固定底座固定到机械臂上,由智能机械臂控制其运动,也可以直接由医生手持所述笔状握杆进行操作。
11、第三方面,本发明提供一种pci手术导管的递送系统的控制方法,其特征在于,对上述的递送系统进行控制,包括以下步骤:
12、步骤s11、手术前,将所述电控旋转偶极子模块通电,产生基于偶极矩的旋转非均匀场;通过调整所述电控旋转偶极子模块的电控参数,将电控旋转偶极子和所述磁约束浮动体之间间距调整到合适值,使所述磁约束浮动体处于被约束态,记录并保存此时所述电控旋转偶极子模块的设置参数;
13、步骤s12、手术开始,导管进入人体后,医生或机械臂通过所述电控旋转偶极子模块牵引所述磁约束浮动体,从而控制所述pci手术导管的移动,实施手术。
14、最后一方面,本发明提供另一种pci手术导管的递送系统的控制方法,其特征在于,对上述的递送系统进行控制,包括以下步骤:
15、步骤s21、手术前,将所述电控旋转偶极子模块通电,产生基于偶极矩的旋转非均匀场;通过调整所述电控旋转偶极子模块的电控参数,将电控旋转偶极子和所述磁约束浮动体之间间距调整到合适值,使所述磁约束浮动体处于被约束态,记录并保存此时所述电控旋转偶极子模块的设置参数;
16、步骤s22、手术开始后,根据步骤s21中记录的参数设置所述电控旋转偶极子模块,并设置所述压力传感器的反馈阈值、反馈深度;
17、步骤s23、导管进入人体后,医生或机械臂通过所述电控旋转偶极子模块牵引所述磁约束浮动体,从而控制所述pci手术导管的移动,实施手术;所述上位控制器根据所述压力传感器输出的信息,指导和调节所述电控旋转偶极子模块的电控参数;当所述上位控制器收到的信息有超阈值情况发生时,所述上位控制器及时启动制动,并通知手术医生采取措施。
18、与现有技术相比,上述发明具有如下优点或者有益效果:
19、(1)本发明采用跟随式控制导管,即导管头部跟随基于pfr的体外电控旋转偶极子模块运动,相比传统线控操作导管,本发明非常接近现在广泛使用的手持式器械操作,更直观、更便捷、更方便医生操作,这大大降低了医生的学习使用门槛,易于医生接受,利于本发明的推广使用。导管被手持控制时,对导管头部的作用力直接由操作杆提供,这使得医生可以直接获取导管头部的力觉信息,这使得医生的“手感经验”能够被充分使用到手术中,增加了手术的安全性,同时可以将力传感设备部署在体外,节省导管内的空间。此外,本发明还可以因此加快介入导管的递送速度,从而使得血管介入手术时间大大缩短;对导管头部的控制更加灵活,可以实现导管头部的全自由度移动。本发明直接对导管头部进行递送和导航,因此导管的递送更加精准,递送的出血率大大降低,介入手术的安全性得到很大提高。
20、(2)本发明利用的pfr是作用在具有磁矩的惯性体上的较大的净力,无论其位置和方向如何,都在弱场方向上受到不均匀的循环场。pfr具有正刚度,通过将其与外部提供的静态力场或循环场本身的组件相结合,可以达到十分稳定的平衡。因为本发明的基于无极性磁排斥效应(pfr)的磁约束浮动体模块多采用密度较大的材料,其质量和惯性矩都较大,故不易被外界干扰偏移。
21、(3)本发明只在头部进行约束导航,相比于传统线约束控制,本装置无需占用导管除头部以外的其它空间,为手术所需的其余导管内器械留出了更多的空间,有利于实现导管的小型化。
- 还没有人留言评论。精彩留言会获得点赞!