一种基于解析模型的表面肌电信号生成方法
本发明涉及生物医学工程领域的一种肌电信号生成方法,尤其涉及一种基于解析模型的表面肌电信号(semg)生成方法。
背景技术:
1、高密度表面肌电信号(hd-semg)是一种非侵入性技术,使用多个紧密间隔的电极覆盖皮肤上的某块目标区域,用于测量人体目标肌肉的运动单元动作电位。近年来,随着集成电子电路技术的发展,hd-semg的采集与处理技术逐渐成熟,并在医疗康复、竞技体育、运动控制、疲劳监测和人机交互等领域得到了广泛的应用。2021年,中国科学技术大学胡若晨基于hd-semg技术,针对肌电模式识别和肌电-肌力估计这两项核心技术所面临的若干关键问题开展深入研究,旨在其作为机器指令控制外界智能体,如康复机器人、外骨骼和智能假肢。同年,中国科学院大学王小晨提出使用hd-semg的无声语音识别方法,满足言语残疾人或健康人在保密工作、安静环境、水下工作和身穿防护服等场景中,无需发出声音就能交换信息的需求。2022年,东南大学生物电子学国家重点实验室宋爱国教授研究团队构建了一个hd-semg数据集,包含同步采集的手部内在肌肉和外在肌肉的hd-semg信号,可用于自动识别灵巧的手指运动。
2、然而,由于表面肌电信号的微弱性、时变性和复杂性,目前对表面肌电信号的研究还不够深入透彻,致使其在实际应用中易受诸多因素干扰,通过其解码人体运动控制意图和身体状态仍然非常具有挑战性。
3、为了深入挖掘表面肌电信号中蕴含的信息,使用hd-semg探索微观层面的生理电信息,研究学者开始从表面肌电信号产生的机理出发。表面肌电信号的解析建模是一个有前途的工具,它能够明晰肌肉电信号的产生过程,并且能够研究不同因素对信号产生和检测的影响。它可作为肌电分解算法和肌电滤波算法的测试和验证工具,还有助于运动单元终板形态、神经病理学和临床病理学肌电分析。但现有的表面肌电信号解析模型多是对单纤维动作电位和单运动单元动作电位的建模,忽略了表面肌电信号产生过程中多肌纤维和多运动单元之间的相互作用和综合效应。并且,模型计算量大,无法负荷多肌纤维和多运动单元的模拟。此外,模型存在对肌肉解剖学和生理学的非准确建模。
技术实现思路
1、针对背景技术中的不足,本发明提出了一种基于解析模型的表面肌电信号生成方法。
2、本发明的技术方案如下:
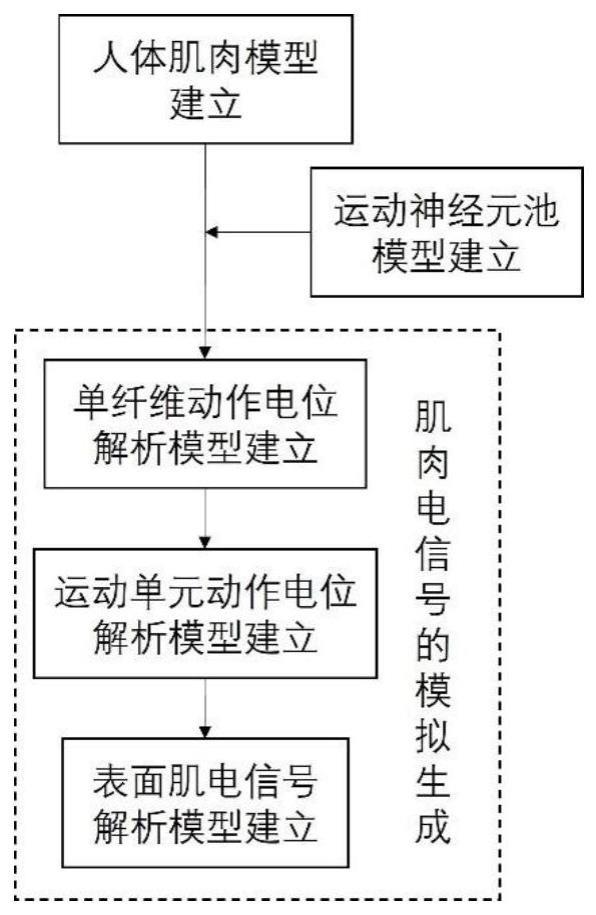
3、1)根据人体肌肉组成,构建获得人体肌肉模型;
4、2)对人体运动神经元池进行建模,获得运动单元的募集与放电模型;
5、3)根据人体肌肉模型和运动单元的募集与放电模型进行电信号的解析建模,获得表面肌电信号解析模型,对表面肌电信号解析模型外加激励后产生运动单元的募集和放电,计算产生的动作电位,最后根据产生的动作电位计算获得目标位置的表面肌电信号。
6、所述1)中,人体肌肉模型包括圆柱形肌肉、脂肪和皮肤,圆柱形肌肉外依次包覆有脂肪和皮肤,圆柱形肌肉由n个运动单元组成,n个运动单元的区域中心均匀分布在圆柱形肌肉的横截面中,各个运动单元均由若干根传导速度相等的肌纤维均匀布置组成,各个运动单元的肌纤维密度相同,肌纤维上的运动终板呈多条带高斯分布。
7、所述肌纤维上的运动终板呈多条带高斯分布,具体地:
8、选择测量表面肌电信号的电极阵列中的基准电极,在肌肉横截面内以基准电极的中心位置为圆心作多个同心圆,相邻两个圆之间的半径差为δd,多个同心圆将人体肌肉模型中各个运动单元分割成多个条带,每个条带中所有肌纤维对应的运动终板位置相同,每个运动单元中多个条带的运动终板位置服从高斯分布并记为第一高斯分布,人体肌肉模型中所有运动单元对应的平均运动终板位置呈0均值的高斯分布并记为第二高斯分布,第一高斯分布的方差比第二高斯分布的方差小。
9、所述人体肌肉模型中,根据运动终板位置,通过以下公式计算第i个运动单元的第d个条带中肌纤维的放电延迟时间
10、
11、其中,μi是第i个运动单元的平均运动终板位置,min(μi)是所有运动单元的平均运动终板位置的最小值,是第i个运动单元中第d个条带的运动终板位置,vf和vp分别是运动神经元分支前和分支后的传导速度,||表示取绝对值。
12、所述2)中,运动单元的募集与放电模型具体为:
13、n个运动单元的募集阈值激励设置为指数分布,当外加激励超过每个运动单元的募集阈值激励时,当前运动单元才被募集;当当前运动单元被募集后,该运动单元的运动神经元才开始放电,每个运动单元中的电流源相等,外加激励与该运动单元的放电率呈线性关系,线性增益ge满足以下公式:
14、
15、pfrn=1.5/tn
16、其中,pfrn和rten分别是第n个运动单元的峰值放电率和募集阈值激励,mfr为第n个运动单元的最小放电率,tn为第n个运动单元的收缩时间。
17、所述3)中,根据产生的动作电位计算获得目标位置的表面肌电信号,具体为:
18、所述目标位置为人体肌肉模型皮肤表面上的每个点时,首先根据目标位置计算各个条带中一根肌纤维产生的动作电位并记为单纤维动作电位,将各个条带的单纤维动作电位与对应肌纤维数量相乘后获得各个条带的动作电位,再将各个运动单元中所有条带的动作电位相加后获得各个运动单元的初始动作电位,接着利用巴特沃斯带通滤波器对各个运动单元的初始动作电位均进行滤波,获得各个运动单元的滤波后的动作电位并记为运动单元动作电位;然后将所有运动单元的运动单元动作电位求和后的动作电位作为该点的表面肌电信号。
19、当所述目标位置为单个测量电极时,将测量电极所处区域中多个点的表面肌电信号求平均后再作为单个测量电极采集到的表面肌电信号。
20、当所述目标位置为多个测量电极时,将各个测量电极所处区域中多个点的表面肌电信号求平均后再分别作为各个测量电极采集到的表面肌电信号,再将各个测量电极采集到的表面肌电信号作差后获得多通道的表面肌电信号。
21、所述各个条带的单纤维动作电位通过以下公式进行求解:
22、
23、
24、
25、
26、其中,表示第k个采样时刻在p点测得的第i个运动单元中第d个条带的单纤维动作电位,k表示第k个采样时刻,表示第i个运动单元的第d个条带中肌纤维的放电延迟时间,δt是采样间隔,nl,nr分别是每根肌纤维左半侧和右半侧上的总采样点数,nd是每根肌纤维的放电延时时间内的总采样点数,t0是电流源的采样间隔,ii是采样后获得的第i个运动单元的离散电流源,nt是每个运动单元的离散电流源的总采样点数,it表示每个运动单元的离散电流源中采样获得的电流源的索引,wl和wr分别是每根肌纤维左半侧和右半侧的权重函数,σr,σz分别是肌肉组织沿径向和沿轴向的电导率,if是每根肌纤维所在条带对应的半径较小的同心圆的序号,vi是第i个运动单元的每根肌纤维的传导速度。
27、相比现有技术,本发明具有以下有益效果:
28、本发明根据肌肉的解剖学和生理学研究,改进肌肉中运动单元、肌纤维和运动终板的布局,建立了更符合真实肌肉特征的解析模型,主要包括运动单元区域中心在肌肉横截面中的均匀分布、肌纤维在运动单元区域中的均匀分布和肌纤维运动终板沿z轴多条带高斯分布的建模,并且提出了运动单元动作电位简化计算方法,因此这个模型不仅能够产生单纤维动作电位和运动单元动作电位,并且能够方便地模拟出单通道和高密度表面肌电信号。此外,基于电极面积内测得的电势处处相等的事实,本发明还建立了电极测得的电信号模型。
- 还没有人留言评论。精彩留言会获得点赞!