一种振动胶囊及其控制方法与流程
本发明涉及医疗器械,尤其涉及一种振动胶囊及其控制方法。
背景技术:
1、《中国慢性便秘专家共识意见(2019)》显示,我国成人慢性便秘的患病率为4%~10%,约有5000万便秘患者饱受便秘带来的困扰。便秘患者表现为排便次数减少,每周排便少于 3 次,便秘对人体健康危害极大,可导致胃肠神经功能紊乱、诱发心脑血管意外甚至猝死,严重影响便秘患者的身心健康。目前便秘治疗方法主要依靠药物,但是长期服用药物会产生依赖性,也会产生其它副作用。
2、因此,亟需提供一种缓解和治疗上述便秘症状的物理解决方案。
技术实现思路
1、为解决现有技术的不足,本发明提供了一种振动胶囊及其控制方法。
2、为实现上述发明目的,本发明采用如下技术方案:
3、一种振动胶囊的控制方法,包括第一电机、第二电机,通过如下步骤实现振动胶囊的控制,
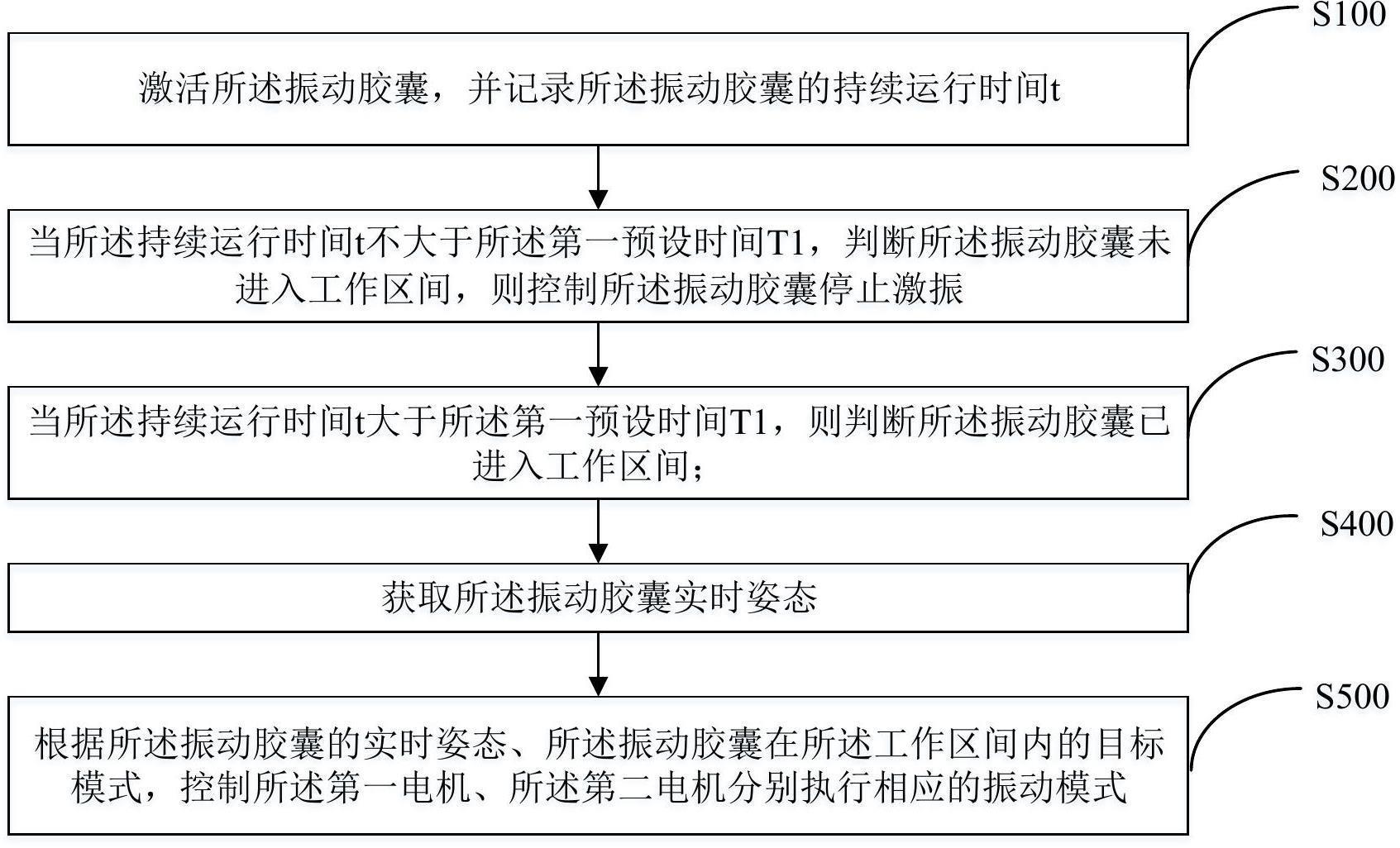
4、步骤100,激活所述振动胶囊,并记录所述振动胶囊的持续运行时间t;
5、步骤200,当所述持续运行时间t不大于所述第一预设时间t1,判断所述振动胶囊未进入工作区间,则控制所述振动胶囊停止激振;
6、步骤300,当所述持续运行时间t大于所述第一预设时间t1,则判断所述振动胶囊已进入工作区间;
7、步骤400,获取所述振动胶囊实时姿态;
8、步骤500,根据所述振动胶囊的实时姿态、所述振动胶囊在所述工作区间内的目标模式,控制所述第一电机、所述第二电机分别执行相应的振动模式;
9、重复执行步骤200-500,直至所述振动胶囊离开所述工作区间。
10、优选的,所述“步骤300 ,当所述持续运行时间t大于所述第一预设时间t1,则判断所述振动胶囊已进入工作区间”之后,还包括,
11、步骤600,当所述振动胶囊的电量低于预设电量,则控制所述振动胶囊停止激振,保留无线通讯功能。
12、所述“步骤300, 当所述持续运行时间t大于所述第一预设时间,则判断所述振动胶囊已进入工作区间”,包括以下至少一种工作状态,
13、当所述持续运行时间t≤第二预设时间t2,其中,第二预设时间大于第一预设时间,则判断所述振动胶囊位于第一工作区间;
14、当所述第二预设时间t2<所述持续运行时间t≤第三预设时间t3,其中第三预设时间大于第二预设时间,则判断所述振动胶囊位于第二工作区间;
15、当所述第三预设时间t3<所述持续运行时间t≤第四预设时间t4,其中第四预设时间大于第三预设时间,则判断所述振动胶囊位于第三工作区间;
16、当所述第四预设时间t4<所述持续运行时间t,则判断所述振动胶囊位于第四工作区间。
17、优选的,步骤400中,“获取所述振动胶囊实时姿态”,包括,
18、步骤410,控制所述振动胶囊停止激振,获取加速度传感器值,计算所述振动胶囊的水平方向和竖直方向重力分量,计算所述振动胶囊的水平方向和竖直方向重力分量比;
19、步骤420,分别控制所述第一电机、所述第二电机短时分时振动,并同时采集所述加速度传感器值;
20、步骤430,根据所述振动胶囊的水平方向和竖直方向重力分量比、所述加速度传感器的侧向振动幅值变化趋势、所述加速度传感器的轴向振动幅值变化趋势判断所述振动胶囊的实时姿态。
21、优选的,所述振动胶囊的实时姿态包括以下姿态中的至少一种:
22、所述振动胶囊平躺;
23、所述振动胶囊水平向左或向右倾斜;
24、所述振动胶囊竖直向左或向右偏移;
25、所述振动胶囊竖直;
26、所述振动胶囊双向贴壁;
27、所述振动胶囊轴向贴壁;
28、所述振动胶囊侧向贴壁;
29、所述振动胶囊未贴壁;
30、所述振动胶囊表面贴靠异物;
31、所述振动胶囊被蠕动挤压进排泄物。
32、当所述振动胶囊位于所述第三工作区间,控制所述振动胶囊执行如下步骤510-540:
33、步骤520,判断所述振动胶囊是否被蠕动挤压进排泄物,若是,则控制所述振动胶囊执行挤压入排泄物的钻出振动(shk-7);
34、若否,则控制所述振动胶囊执行双向调姿态振动(shk-6);
35、步骤530,轴向和侧向分时或同时小幅振动使胶囊处于近视平躺状态,静止状态采集加速度传感器的轴向加速度幅值,判断所述轴向加速度幅值是否小于0.2g(预设平躺加速度),若是,则控制所述振动胶囊执行轴向靠边振动(shk-5);
36、步骤540,判断所述振动胶囊是否轴向贴壁,若是,则控制所述振动胶囊执行轴向治疗刺激振动(shk-2);
37、步骤550,重复执行步骤520-540,直至所述振动胶囊离开所述第三工作区间。
38、优选的,执行步骤520-540的任一步骤之前,先执行步骤510,当t4-t<最大容差时间间隔t_in,判断所述振动胶囊的电量是否降至预设电量,若是,则控制所述振动胶囊停止激振,保留无线通讯功能;若否,则控制所述振动胶囊继续执行相应步骤。
39、优选的,当所述振动胶囊位于所述第四工作区间,则控制所述振动胶囊停止激振,保留无线通讯功能。
40、优选的,当所述振动胶囊的实时姿态为至少有一方向贴壁时,则控制所述振动胶囊沿贴壁方向振动(shk-2 or shk-3),未贴壁方向停止激振。
41、优选的,当所述振动胶囊的实时姿态为未贴壁时,则控制所述振动胶囊执行贴壁靠边振动(shk-4)。
42、优选的,当所述振动胶囊位于所述第一工作区间,所述振动胶囊的实时姿态为所述振动胶囊表面贴靠异物的工况时,且当t2-t<最大容差时间间隔t_in,则控制所述振动胶囊启动下一相邻工作区间的控制模式,按照所述振动胶囊位于下一相邻工作区间,重新判断振动胶囊的实时姿态,并执行相应的振动模式。
43、优选的,当所述振动胶囊位于所述第二工作区间,所述振动胶囊的实时姿态为所述振动胶囊被蠕动挤压进排泄物的工况时,且当t3-t<最大容差时间间隔t_in,则控制所述振动胶囊启动下一相邻工作区间的控制模式,按照所述振动胶囊位于下一相邻工作区间,重新判断振动胶囊的实时姿态,并执行相应的振动模式。
44、本发明还提供一种振动胶囊,包括第一电机,第二电机,振动胶囊激活模块,工作区间判断模块,胶囊姿态判断模块,振动模式执行模块,通讯模块,其中,
45、振动胶囊激活模块,用于激活所述振动胶囊;
46、工作区间判断模块,用于记录所述振动胶囊的持续工作时间,并判断所述振动胶囊所处于的工作区间;
47、胶囊姿态获取模块,用于获取所述振动胶囊的实时姿态;
48、振动模式执行模块,用于根据获取的所述振动胶囊的实时姿态、所述振动胶囊在所述工作区间内的目标模式,控制所述第一电机、所述第二电机分别执行相应的振动模式;
49、通讯模块,用于实现振动胶囊与外界通讯。
50、进一步的,本发明还提供一种振动胶囊,包括存储器、微型处理器及存储在所述存储器上并可在所述微型处理器上运行的计算机程序,计算机程序被微型处理器执行时实现前述的振动胶囊的控制方法中的步骤。
51、综上,本专利公开了具有两个振动电机(第一电机、第二电机)、两个电机垂直布局的振动胶囊结构,振动胶囊除电机外还包含电池、三维振动传感器、具有计时和振动测量功能的电路板。在控制方法上,将振动胶囊的工作范围划分为“盲肠及升结肠段”、“横结肠段”、“降结肠段”和“其他(含乙状结肠及直肠段)”,根据各段生理结构及排泄物特点,结合振动传感器实时测量的振动胶囊实时姿态,控制所述第一电机、所述第二电机分别执行各工作区间的目标振动模式。具体如下:
52、(1)当振动胶囊从包装中拆除后,激活所述振动胶囊,并记录所述振动胶囊的持续运行时间t;
53、(2)当所述持续运行时间t不大于所述第一预设时间t1,判断所述振动胶囊未进入工作区间(尚未进入盲肠段),则控制所述振动胶囊停止激振;
54、(3)在“盲肠及升结肠段”、“横结肠段”、“降结肠段”和“其他(含乙状结肠及直肠段)”,获取所述振动胶囊实时姿态,根据所述振动胶囊的实时姿态、所述振动胶囊在所述工作区间内的目标模式,控制所述第一电机、所述第二电机分别执行相应的振动模式;
55、(4)重复步骤(3),直至所述振动胶囊离开所述工作区间。
56、本发明的有益效果如下:
57、本发明的振动胶囊控制方法,在吞服后经过预设时间到达工作区间内,即经过肠道时,振动胶囊会以设定的振动模式进行长达数小时的间歇性舒适按摩,激活肠道神经网络,唤醒肠道动力,促进结肠恢复自主蠕动,从而缓解和治疗便秘,并且本方案是一种非药物方式,不会产生依赖作用。
58、进一步,本发明的振动胶囊还具有双向振动功能,能够为肠道提供多向的刺激,相比于单向刺激能够更加有效地激活肠道神经网络,唤醒肠道动力。
59、进一步,本发明的振动胶囊通过双向分时振动,判断振动胶囊所处贴壁状态,并结合生理结构和排泄物状态,保证把振动能量主要释放到贴壁方向上,相比于传统定时固定振动模式,能够提高振动能量的有效利用,从而提升治疗效果。
60、最后,在被排泄物粘覆或包裹的情况发生后,可及时调整振动胶囊的振动模式,使振动胶囊能及时摆脱或钻出排泄物,从而避免胶囊过早被排泄物包裹引起的失效。
- 还没有人留言评论。精彩留言会获得点赞!