一种手术机器人用戳卡夹持装置的制作方法
[]本发明涉及医疗器械,具体地说是一种手术机器人用戳卡夹持装置。
背景技术:
0、[背景技术]
1、目前,腹腔镜微创手术机器人通常采用主从控制,即医生在主控制台通过遥操作控制从端手术器械的动作。手术开始时先通过戳卡建立进入人体的通道,戳卡穿过人体皮肤的位置被称为“不动点”,手术时需将从端持械臂的机构不动点与戳卡穿过的不动点重合,并将戳卡通过夹持器固定在持械臂上,从而使得在手术过程中不动点保持不变。另外,在将持械臂移至戳卡附近对接时通常采用单手拖曳的操作方式,这就要求戳卡既要能牢固准确地固定在夹持器上,且夹持过程也要便于医生单手操作。然而,现有的通用型戳卡装置通常无法实现此需求。
技术实现思路
0、[
技术实现要素:
]
1、本发明的目的就是要解决上述的不足而提供一种手术机器人用戳卡夹持装置,能够便捷地实现对接与释放,并可自动检测戳卡安装是否到位,使得戳卡不仅能牢固准确地固定在夹持器上,而且夹持过程便于医生单手操作,提高了使用过程中的可靠性与便利性。
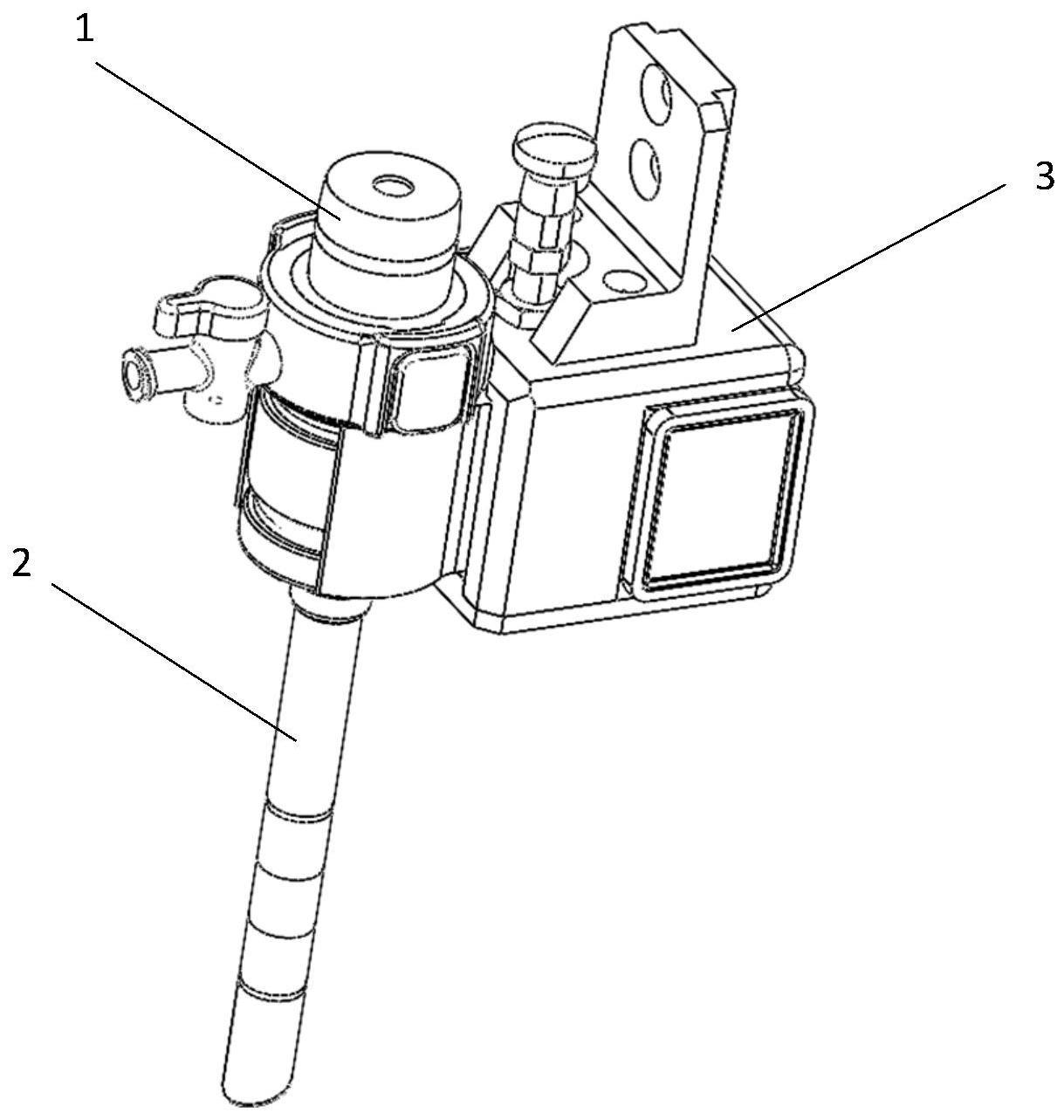
2、为实现上述目的设计一种手术机器人用戳卡夹持装置,包括戳卡转接头1、戳卡本体2和夹持器3,所述戳卡本体2安装在夹持器3上,所述戳卡本体2上安装有戳卡转接头1;所述夹持器3包括壳体302、止锁基座309、夹爪一304和夹爪二305,所述止锁基座309安装于壳体302内,所述夹爪一304、夹爪二305通过销钉313固定于止锁基座309上,并分别绕销钉313转动,所述夹爪一304与夹爪二305之间设置有铰链一316、铰链二315,所述夹爪一304、夹爪二305分别通过销钉二314与铰链一316、铰链二315的一端相连接,所述铰链一316、铰链二315的另一端通过移动销322连接在一起,所述移动销322与止锁基座309之间设置有拉伸弹簧317,所述拉伸弹簧317一端固定在止锁基座309上,所述拉伸弹簧317另一端固定在移动销322上,所述夹爪一304、夹爪二305上安装有解锁按钮308,并通过手动按压或松开解锁按钮308使夹爪一304、夹爪二305张开或抱紧,从而便捷地实现对接与释放。
3、作为优选,所述止锁基座309上通过紧定螺钉319固定有滚珠花键外筒318,所述滚珠花键外筒318内穿设有花键轴320,所述花键轴320固定于止锁条306上,并沿滚珠花键外筒318轴向移动,所述止锁条306与外筒318之间安装有弹簧321,所述止锁基座309后部安装有开关座310,所述开关座310上安装有微动开关311,从而进一步实现了自动检测戳卡安装是否到位。
4、作为优选,所述戳卡本体2与夹持器3对接处设置有导向凸台201,所述戳卡本体2上的导向凸台201与止锁条306上的凹槽配合连接,所述止锁条306克服弹簧321的阻力向后移动至戳卡本体2到位时,所述花键轴320按压微动开关311并发出安装到位的信号。
5、作为优选,还包括锁定销303,所述锁定销303可上下移动式连接于壳体302上,所述锁定销303落下时穿过夹爪一304、夹爪二305上的销孔,并将夹爪一304、夹爪二305锁定,所述夹爪一304、夹爪二305此时在解锁按钮308的按压下无法张开,进而能防止手术过程中意外松动。
6、作为优选,所述戳卡转接头1包括转接头基体101,所述转接头基体101上安装有弹片109,所述弹片109两侧的勾爪上安装有按钮110,所述勾爪末端设置有倒钩,所述倒钩与戳卡本体2内侧的台阶面配合,所述戳卡转接头1通过倒钩和台阶面固定在戳卡本体2上,并在同时按压两侧的按钮110时向外拔出,使得戳卡转接头1与戳卡本体2的装卸更加方便快捷,便于重复使用时的更换。
7、作为优选,所述转接头基体101的上部安装有密封接头105,所述密封接头105的上下两端分别安装有上密封帽106和下密封帽107,所述密封接头105与转接头基体101之间安装有o型密封圈108,从而使得手术过程中气体不会从密封接头105处逸出。
8、作为优选,所述转接头基体101侧面设置有注气孔104,所述注气孔104处通过螺钉103安装有注气阀102,所述转接头基体101通过注气阀102的转动控制气路的开闭,所述注气阀102与注气孔104间设置有o型密封圈二111,并通过o型密封圈二111防止气体逸出。
9、作为优选,所述戳卡转接头1与戳卡本体2之间设置有o型圈112,所述o型圈112用于防止气体从戳卡转接头1与戳卡本体2之间的缝隙中逸出。
10、作为优选,所述壳体302上安装有固定块301,所述夹持器3通过固定块301安装于持械臂上,所述壳体302、固定块301和止锁基座309固定在一起。
11、作为优选,所述戳卡转接头1为一次性使用的转接头,所述戳卡本体2通过戳卡转接头1可经高温灭菌后多次重复使用。
12、本发明同现有技术相比,具有如下优点:
13、(1)本发明在机器人手术过程中,戳卡本体安装在夹持器上,一次性使用的戳卡转接头安装在戳卡本体上,从而使得戳卡本体可经高温灭菌后多次重复使用;
14、(2)本发明所述戳卡与其夹持器用于微创机器人手术,可便捷地实现对接与释放,并可自动检测戳卡安装是否到位,且能防止手术过程中意外松动;
15、(3)本发明所述戳卡既能牢固准确地固定在夹持器上,且夹持过程便于医生单手操作,解决了现有的通用型戳卡装置无法实现此需求的问题;
16、(4)本发明所述夹持器在未夹持状态时,夹爪与解锁按钮均在自然状态,止锁条在弹簧作用下顶出,锁定销在拉起的状态,而戳卡安装到位后锁定销落下穿过夹爪上的销孔,从而可将夹爪与戳卡锁定使其无法移动;
17、(5)本发明结构较为简洁,极大地降低了加工成本,提高了使用过程中的可靠性与便利性,值得推广应用。
技术特征:
1.一种手术机器人用戳卡夹持装置,其特征在于:包括戳卡转接头(1)、戳卡本体(2)和夹持器(3),所述戳卡本体(2)安装在夹持器(3)上,所述戳卡本体(2)上安装有戳卡转接头(1);所述夹持器(3)包括壳体(302)、止锁基座(309)、夹爪一(304)和夹爪二(305),所述止锁基座(309)安装于壳体(302)内,所述夹爪一(304)、夹爪二(305)通过销钉(313)固定于止锁基座(309)上,并分别绕销钉(313)转动,所述夹爪一(304)与夹爪二(305)之间设置有铰链一(316)、铰链二(315),所述夹爪一(304)、夹爪二(305)分别通过销钉二(314)与铰链一(316)、铰链二(315)的一端相连接,所述铰链一(316)、铰链二(315)的另一端通过移动销(322)连接在一起,所述移动销(322)与止锁基座(309)之间设置有拉伸弹簧(317),所述拉伸弹簧(317)一端固定在止锁基座(309)上,所述拉伸弹簧(317)另一端固定在移动销(322)上,所述夹爪一(304)、夹爪二(305)上安装有解锁按钮(308),并通过手动按压或松开解锁按钮(308)使夹爪一(304)、夹爪二(305)张开或抱紧。
2.如权利要求1所述的手术机器人用戳卡夹持装置,其特征在于:所述止锁基座(309)上通过紧定螺钉(319)固定有滚珠花键外筒(318),所述滚珠花键外筒(318)内穿设有花键轴(320),所述花键轴(320)固定于止锁条(306)上,并沿滚珠花键外筒(318)轴向移动,所述止锁条(306)与外筒(318)之间安装有弹簧(321),所述止锁基座(309)后部安装有开关座(310),所述开关座(310)上安装有微动开关(311)。
3.如权利要求2所述的手术机器人用戳卡夹持装置,其特征在于:所述戳卡本体(2)与夹持器(3)对接处设置有导向凸台(201),所述戳卡本体(2)上的导向凸台(201)与止锁条(306)上的凹槽配合连接,所述止锁条(306)克服弹簧(321)的阻力向后移动至戳卡本体(2)到位时,所述花键轴(320)按压微动开关(311)并发出安装到位的信号。
4.如权利要求1所述的手术机器人用戳卡夹持装置,其特征在于:还包括锁定销(303),所述锁定销(303)可上下移动式连接于壳体(302)上,所述锁定销(303)落下时穿过夹爪一(304)、夹爪二(305)上的销孔,并将夹爪一(304)、夹爪二(305)锁定,所述夹爪一(304)、夹爪二(305)此时在解锁按钮(308)的按压下无法张开。
5.如权利要求1所述的手术机器人用戳卡夹持装置,其特征在于:所述戳卡转接头(1)包括转接头基体(101),所述转接头基体(101)上安装有弹片(109),所述弹片(109)两侧的勾爪上安装有按钮(110),所述勾爪末端设置有倒钩,所述倒钩与戳卡本体(2)内侧的台阶面配合,所述戳卡转接头(1)通过倒钩和台阶面固定在戳卡本体(2)上,并在同时按压两侧的按钮(110)时向外拔出。
6.如权利要求5所述的手术机器人用戳卡夹持装置,其特征在于:所述转接头基体(101)的上部安装有密封接头(105),所述密封接头(105)的上下两端分别安装有上密封帽(106)和下密封帽(107),所述密封接头(105)与转接头基体(101)之间安装有o型密封圈(108)。
7.如权利要求5所述的手术机器人用戳卡夹持装置,其特征在于:所述转接头基体(101)侧面设置有注气孔(104),所述注气孔(104)处通过螺钉(103)安装有注气阀(102),所述转接头基体(101)通过注气阀(102)的转动控制气路的开闭,所述注气阀(102)与注气孔(104)间设置有o型密封圈二(111),并通过o型密封圈二(111)防止气体逸出。
8.如权利要求7所述的手术机器人用戳卡夹持装置,其特征在于:所述戳卡转接头(1)与戳卡本体(2)之间设置有o型圈(112),所述o型圈(112)用于防止气体从戳卡转接头(1)与戳卡本体(2)之间的缝隙中逸出。
9.如权利要求1所述的手术机器人用戳卡夹持装置,其特征在于:所述壳体(302)上安装有固定块(301),所述夹持器(3)通过固定块(301)安装于持械臂上,所述壳体(302)、固定块(301)和止锁基座(309)固定在一起。
10.如权利要求1所述的手术机器人用戳卡夹持装置,其特征在于:所述戳卡转接头(1)为一次性使用的转接头,所述戳卡本体(2)通过戳卡转接头(1)可经高温灭菌后多次重复使用。
技术总结
本发明涉及一种手术机器人用戳卡夹持装置,包括戳卡转接头、戳卡本体和夹持器,戳卡本体安装在夹持器上,戳卡本体上安装有戳卡转接头;夹持器包括壳体、止锁基座、夹爪一和夹爪二,止锁基座安装于壳体内,夹爪一、夹爪二通过销钉固定于止锁基座上,并分别绕销钉转动,夹爪一、夹爪二还分别通过销钉二与铰链一、铰链二的一端相连接,铰链一、铰链二的另一端通过移动销连接在一起,拉伸弹簧一端固定在止锁基座上,另一端固定在移动销上,夹爪一、夹爪二上安装有解锁按钮,并通过手动按压或松开解锁按钮使夹爪一、夹爪二张开或抱紧;本发明能够便捷地实现对接与释放,并可自动检测戳卡安装是否到位,提高了使用过程中的可靠性与便利性。
技术研发人员:严煌,赵凌舟
受保护的技术使用者:上海睿触科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!