软杆衔接机构、传动盒、手术器械及手术机器人的制作方法
本发明涉及医疗器械,具体地说,涉及软杆衔接机构、传动盒、手术器械及手术机器人。
背景技术:
1、微创手术是指利用腹腔镜、胸腔镜等现代医疗器械及相关设备在人体腔体内部施行手术的一种手术方式。相比传统手术方式微创手术具有创伤小、疼痛轻、恢复快等优势。然而,微创手术中微创器械由于受到切口大小的限制,手术操作难度大为增加,且医生在长时间手术过程中的疲劳、颤抖等动作会被放大,这成为制约微创手术技术发展的关键因素。随着机器人技术的发展,一种可以克服缺点、继承优点的微创医疗领域新技术——微创手术机器人技术应运而生。
2、常见的微创手术机器人由医生控制台、患者侧手推车和显示设备组成,外科医生在医生控制台操作输入装置,并将输入传给与远程操作的外科器械连接的患者侧手推车。基于在医生控制台的外科医生的输入,远程操作的外科器械在患者侧手推车处被致动以对患者动手术,从而产生医生控制台和在患者侧手推车的外科器械之间的主从控制关系。其中,单孔手术机器人具有切口少、术后恢复快的优点,一般使用柔性手术器械通过一个切口进入人体内开展手术。可见,柔性手术器械对单孔手术机器人来说至关重要。
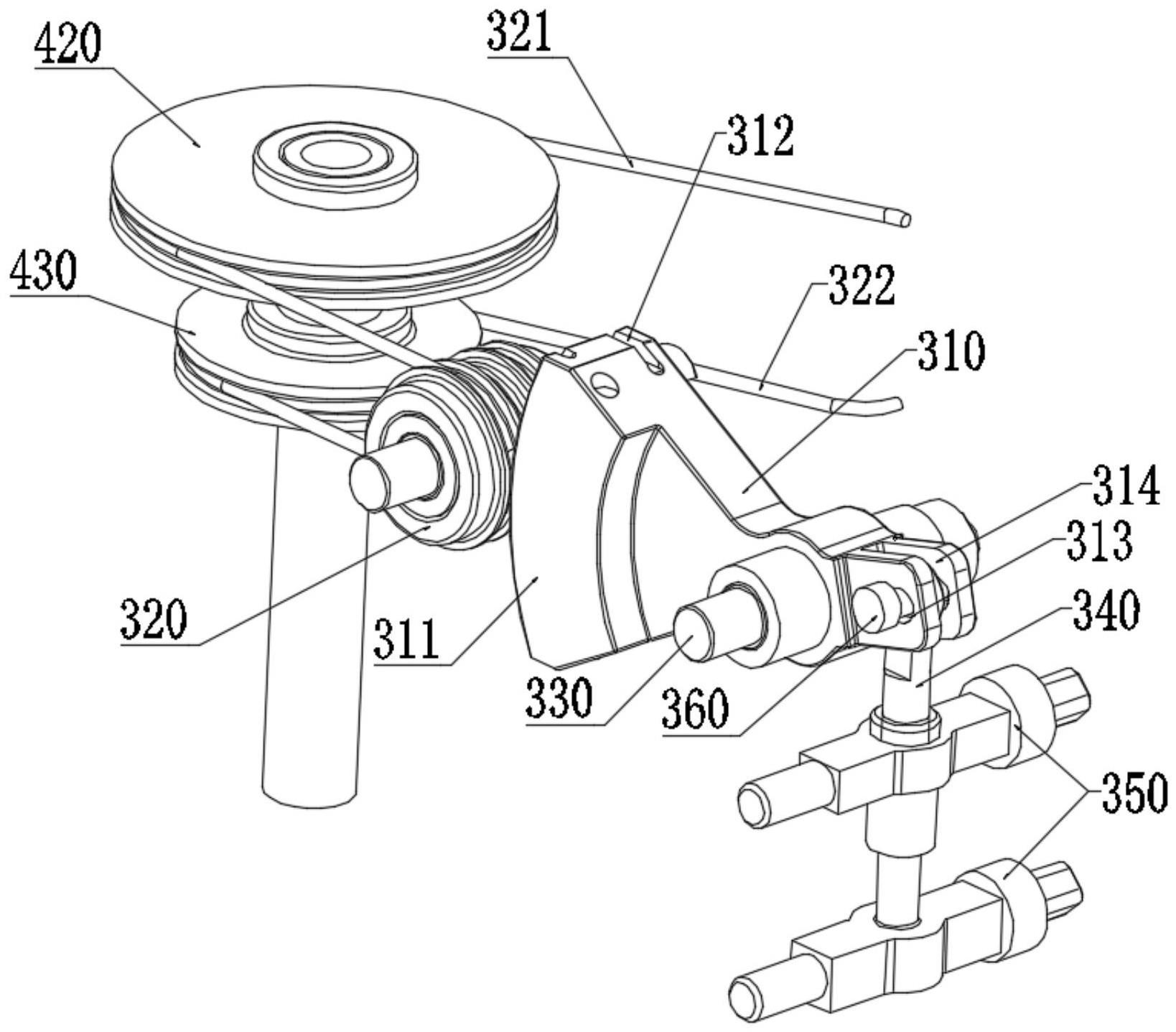
3、一般利用钢丝绳传动系统,牵引手术剪刀、软管等器械,以满足狭小空间下微创外科手术对精度和灵活性要求,钢丝绳传动系统控制软杆上下以带动手术剪刀上下,如图5-6所示,目前常见的钢丝绳传动方案:通过软杆驱动轴的顺逆时针旋转,带动大转向轮、小转向轮转动,大转向轮上的钢丝绳绕过导向轮上方,端部与软杆衔接部的末端钢丝管夹连接,小转向轮上的钢丝绳绕过导向轮下方,端部与软杆衔接部的顶端钢丝管夹连接,大转向轮顺时针旋转带动钢丝绳拉动软杆衔接部的末端钢丝管夹,末端钢丝管夹顺时针绕软杆衔接部定心旋转,带动软杆衔接部远离钢丝绳牵引端的一端也即插接端,插接端带动软杆向下运动,软杆向上运动同理。
4、上述的钢丝绳传动方案存在以下技术问题:
5、1、软杆衔接部靠近导向轮的一侧为直杆状,在钢丝绳牵引衔接部转动时,由于衔接部与导向轮的位移差,钢丝绳的包角发生改变,摩擦力大小改变,增加机械传动的不稳定性。
6、2、插接端是绕软杆衔接部定心顺时针旋转向下,软杆并不是垂直向下运动,由此,软杆的器械末端产生的偏移误差值更加大,给操作带来不便。
技术实现思路
1、针对现有技术中存在的上述问题,本发明提供了软杆衔接机构、传动盒、手术器械及手术机器人。
2、为了解决上述技术问题,本发明通过下述技术方案得以解决:
3、第一方面,提供一种软杆衔接机构,所述软杆衔接机构包括,
4、弧形部,设于软杆衔接部靠近导向轮的一端处;
5、所述弧形部沿所述软杆衔接部转动方向上的至少一端处用于固定驱动绳;
6、定轴,处于所述弧形部的中心对称轴线上;所述弧形部的圆心与所述定轴的圆心重合。
7、作为优选,所述弧形部包括,
8、至少一个容纳槽,所述容纳槽设于所述弧形部上且朝向所述导向轮的侧壁上,所述容纳槽沿所述弧形部的转动方向延伸设置;
9、所述驱动绳的端部自所述导向轮的一侧引入至所述容纳槽中,于所述容纳槽中所述驱动绳的端部延伸至所述弧形部的一端处进行固定。
10、第二方面,提供一种软杆衔接结构,所述软杆衔接机构包括,
11、腰型孔,设于软杆衔接部靠近软杆的一端处;
12、所述软杆的一端与所述腰型孔活动配合;
13、于所述软杆衔接部带动所述软杆往复移动的过程中,所述软杆的一端在所述腰型孔中往复移动。
14、作为优选,所述软杆衔接机构还包括至少一个方向引导件,所述方向引导件相对于导向轮的位置保持不变且套设于所述软杆上;
15、所述方向引导件于所述软杆移动的过程中,保持所述软杆处于所述方向引导件的引导方向。
16、作为优选,所述软杆的一端处设有可伸入至所述腰型孔中的连接杆,所述连接杆与所述腰型孔之间活动连接。
17、作为优选,于所述软杆衔接部处于可转动角度的中间值的状态下,所述腰型孔的长度方向不与第一方向垂直;其中,在所述软杆衔接部处于可转动角度的中间值的状态下,与所述软杆相互垂直的方向为所述第一方向。
18、作为优选,于所述软杆衔接部处于可转动角度的中间值的状态下,所述腰型孔的长度方向与所述第一方向的夹角范围在±30°之间。
19、第三方面,提供一种传动盒,包括上述的软杆衔接机构;还包括壳体、软杆驱动轴、大转向轮、小转向轮、控制末端器械运动的传动机构和传动绳,所述软杆驱动轴上缠绕有驱动绳,所述软杆驱动轴与所述壳体通过轴承连接。
20、第四方面,提供一种手术器械,包括上述的传动盒;还包括器械轴和末端器械。
21、第五方面,提供一种手术机器人,包括上述的手术器械;还包括主控台和从操作手,所述从操纵手上可拆卸地装配有所述手术器械。
22、本发明至少具备以下有益效果:
23、1、弧形部的设置结合两个容纳槽,使第一钢丝绳和第二钢丝绳与导向轮配合更加贴合保持包角不变;驱动绳、导向轮、软杆衔接部配合更加稳定,防止驱动绳脱离导向轮;驱动绳和软杆衔接部连接更加紧密。
24、2、软杆衔接部与软杆连接的一端设置腰型孔,软杆的顶部通过螺杆、腰型孔与软杆衔接部连接,软杆外部套接有方向引导件,软杆顶部活动于腰型孔中,配合方向引导件,保障软杆沿其长度方向运动,避免在第一方向上产生偏移。
技术特征:
1.软杆衔接机构,其特征在于:所述软杆衔接机构包括,
2.根据权利要求1所述的软杆衔接机构,其特征在于:所述弧形部包括,
3.软杆衔接机构,其特征在于:所述软杆衔接机构包括,
4.根据权利要求3所述的软杆衔接机构,其特征在于:所述软杆衔接机构还包括至少一个方向引导件,所述方向引导件相对于导向轮的位置保持不变且套设于所述软杆上;
5.根据权利要求3所述的软杆衔接机构,其特征在于:所述软杆的一端处设有可伸入至所述腰型孔中的连接杆,所述连接杆与所述腰型孔之间活动连接。
6.根据权利要求3所述的软杆衔接机构,其特征在于:于所述软杆衔接部处于可转动角度的中间值的状态下,所述腰型孔的长度方向不与第一方向垂直;其中,在所述软杆衔接部处于可转动角度的中间值的状态下,与所述软杆相互垂直的方向为所述第一方向。
7.根据权利要求6所述的软杆衔接机构,其特征在于:于所述软杆衔接部处于可转动角度的中间值的状态下,所述腰型孔的长度方向与所述第一方向的夹角范围在±30°之间。
8.传动盒,其特征在于:包括权利要求1-7任一所述的软杆衔接机构;还包括壳体、软杆驱动轴、大转向轮、小转向轮、控制末端器械运动的传动机构和传动绳,所述软杆驱动轴上缠绕有驱动绳,所述软杆驱动轴与所述壳体通过轴承连接。
9.手术器械,其特征在于:包括权利要求8所述的传动盒;还包括器械轴和末端器械。
10.手术机器人,其特征在于:包括权利要求9所述的手术器械;还包括主控台和从操作手,所述从操纵手上可拆卸地装配有所述手术器械。
技术总结
本发明涉及医疗器械技术领域,具体地说,涉及软杆衔接机构、传动盒、手术器械及手术机器人;软杆衔接机构,包括弧形部,设于软杆衔接部靠近导向轮的一端处;弧形部沿软杆衔接部转动方向上的至少一端处用于固定驱动绳;定轴,处于所述弧形部的中心对称轴线上;所述弧形部的圆心与所述定轴的圆心重合;传动盒,包括上述的软杆衔接机构;手术器械,包括上述的传动盒;手术机器人,包括上述的手术器械;本申请使驱动绳与导向轮配合更加贴合保持包角不变,防止驱动绳脱离导向轮;软杆衔接部与软杆连接的一端设置腰型孔,软杆顶部活动于腰型孔中,配合方向引导件,保障软杆沿其长度方向运动,避免在第一方向上产生偏移。
技术研发人员:请求不公布姓名
受保护的技术使用者:杭州唯精医疗机器人有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!