一种防倾倒的助行机器人的制作方法
本发明涉及康复训练器械,特别涉及一种防倾倒的助行机器人。
背景技术:
1、现代社会,由于外伤、疾病等各种原因导致的下肢瘫痪或下肢残疾病人数不胜数,病人本人生活质量差同时也连累其整个家庭为之操心劳力,因此,无论是病人还是其家人,都亟待病人尽快康复或者尽可能恢复病人的行动能力。因此,如何开发出可促进这类人群康复或辅助其正常行动的康复器具成为本领域技术人员关注的课题。
2、在相关技术中,通常利用助行机器人作为残疾患者的代步和康复训练器具。其中在助行机器人通常包括代步模式和训练模式,当处于代步模式时,助行机器人整体呈轮椅状,患者可以以坐姿坐于助行机器人的座椅上,利用扶手上的控制器控制座椅下方的驱动轮驱动整个助行机器人在陆地上移动。而处于训练模式时,助行机器人可以进行类似折叠椅的折叠变形,使座椅的靠背和坐板立起,利用座椅的脚踏板对患者进行支撑,同时连接于座椅靠背上的安全带对患者的上板身进行固定,使患者保持站立姿态进行训练。
3、相关技术中的助行机器人,其整体重心通常分散于座椅下方折叠支架上的后部驱动轮和前部支撑轮上。在进行代步行进的过程中,当前部支撑轮接触凹凸不平的地面凸起时,容易发生前倾或者整体侧翻造成患者摔倒,存在安全隐患。
技术实现思路
1、本发明实施例提供了一种防倾倒的助行机器人,能够提高行驶于不同平整度地面上的稳定性,避免整体倾倒,增加患者进行代步和康复训练时的安全性。所述技术方案如下:
2、本发明实施例提供了一种防倾倒的助行机器人,包括:上部支架、机器人主体和滑轮组件,
3、所述上部支架包括靠背垫、靠背支架和安全带吊杆,所述靠背垫固定安装于所述靠背支架上,所述安全带吊杆的一端与所述靠背支架位于所述靠背垫一端的端部转动连接,所述安全带吊杆的另一端设置有用于连接安全带的挂扣部;
4、所述机器人主体包括坐板、滑轮连杆折叠支架和脚踏板,所述坐板、所述脚踏板和所述靠背支架位于所述靠背垫另一端的端部均与所述滑轮连杆折叠支架连接,所述脚踏板位于所述坐板下方,所述脚踏板底部可拆卸地设置有弹性缓冲垫,所述滑轮连杆折叠支架被配置为能够通过折叠调节所述靠背支架的离地高度以及所述坐板和所述靠背垫之间的夹角;
5、所述滑轮组件包括两个前轮组和两个后驱动轮,所述前轮组包括连接杆和两个支撑轮,所述两个支撑轮可转动地安装于所述连接杆的两端,所述连接杆的中部与所述滑轮连杆折叠支架的底部前端转动连接,所述连接杆的转轴与所述安全带吊杆的转轴平行,所述后驱动轮与所述滑轮连杆折叠支架的底部后端转动连接,所述两个前轮组和所述两个后驱动轮均相对于所述坐板对称布置。
6、优选地,在所述两个前轮组中,相互对称布置的两个所述支撑轮相互倾斜布置,在远离所述坐板的方向上,两个所述支撑轮之间的间距逐渐增大。
7、优选地,所述两个后驱动轮相互倾斜布置,在远离所述坐板的方向上,所述两个后驱动轮之间的间距逐渐增大。
8、优选地,所述脚踏板包括左脚踏板和右脚踏板,所述左脚踏板和所述右脚踏板间隔布置且相对于所述坐板的中线对称,所述左脚踏板和所述右脚踏板相互远离的一端均与所述滑轮连杆折叠支架转动连接,所述左脚踏板和所述右脚踏板的转轴均与所述连接杆的转轴平行。
9、优选地,所述防倾倒的助行机器人还包括限位挡臂,所述限位挡臂安装于所述左脚踏板和所述右脚踏板下方且与所述左脚踏板和所述右脚踏板相抵接,所述限位挡臂的两端分别与所述滑轮连杆折叠支架可拆卸连接。
10、优选地,所述弹性缓冲垫背向所述脚踏板的一面间隔设置有多个防滑齿。
11、优选地,所述防倾倒的助行机器人还包括甩腿训练架,所述甩腿训练架上设置有腿部夹持机构,所述甩腿训练架的其中一端转动连接于所述滑轮连杆折叠支架上,所述甩腿训练架的转轴与所述安全带吊杆的转轴平行。
12、优选地,所甩腿训练架呈长条状,所述腿部夹持机构包括沿所述甩腿训练架的长度方向间隔设置的大腿夹扣和小腿夹扣,所述甩腿训练架包括大腿摆架和小腿摆架,所述大腿摆架的一端设置有用于连接所述滑轮连杆折叠支架的转动轴,所述大腿夹扣设置于大腿摆架的另一端,所述大腿摆架的另一端与所述小腿摆架滑动连接,所述小腿夹扣设置于所述小腿摆架远离所述转动轴的一端。
13、优选地,所述小腿摆架包括过渡段和甩动段,所述过渡段与所述大腿摆架滑动连接,所述过渡段的另一端与所述甩动段的一端转动连接,所述小腿夹扣设置于所述甩动段的另一端。
14、优选地,所述滑轮连杆折叠支架连接有电池模组、动力部件和控制器,所述动力部件用驱动所述滑轮连杆折叠支架的折叠和所述后驱动轮转动,所述动力部件和所述控制器均连接于所述电池模组。
15、本发明实施例提供的技术方案带来的有益效果至少包括:
16、能够实现患者处于坐姿状态的代步模式以及患者处于站姿状态的站姿训练模式切换,并且在助行机器人进行代步模式,患者坐于坐板上进行水平移动时,若遇到凹凸不平的地面,位于滑轮连杆折叠支架前端的前轮组会率先接触这部分地面。有与前轮组由前后连接于连接杆两端的两个支撑轮组成,两个支撑轮可以跟随连接杆绕连接杆中部的与滑轮连杆折叠支架的转动连接处相对转动。前后两个支撑轮在接触凹凸不平的地面时能够适应性的下落和上抬,保证前轮组的两个支撑轮能够稳定与地面进行稳定的多点接触,减少行进过程中的颠簸抖动,避免发生倾倒。而当出现因地面凹凸幅度过大,或者行进速度过快等导致机器人主体不可避免的前倾时,位于脚踏板底部的弹性缓冲垫会率先与地面接触,利用其弹性进行缓冲和支撑,避免倾倒或者减少倾倒速度,为患者争取反应时间进行身体和助行机器人姿态的及时调整。有效提高行驶于不同平整度地面上的稳定性,避免整体倾倒,增加患者进行代步和康复训练时的安全性。
技术特征:
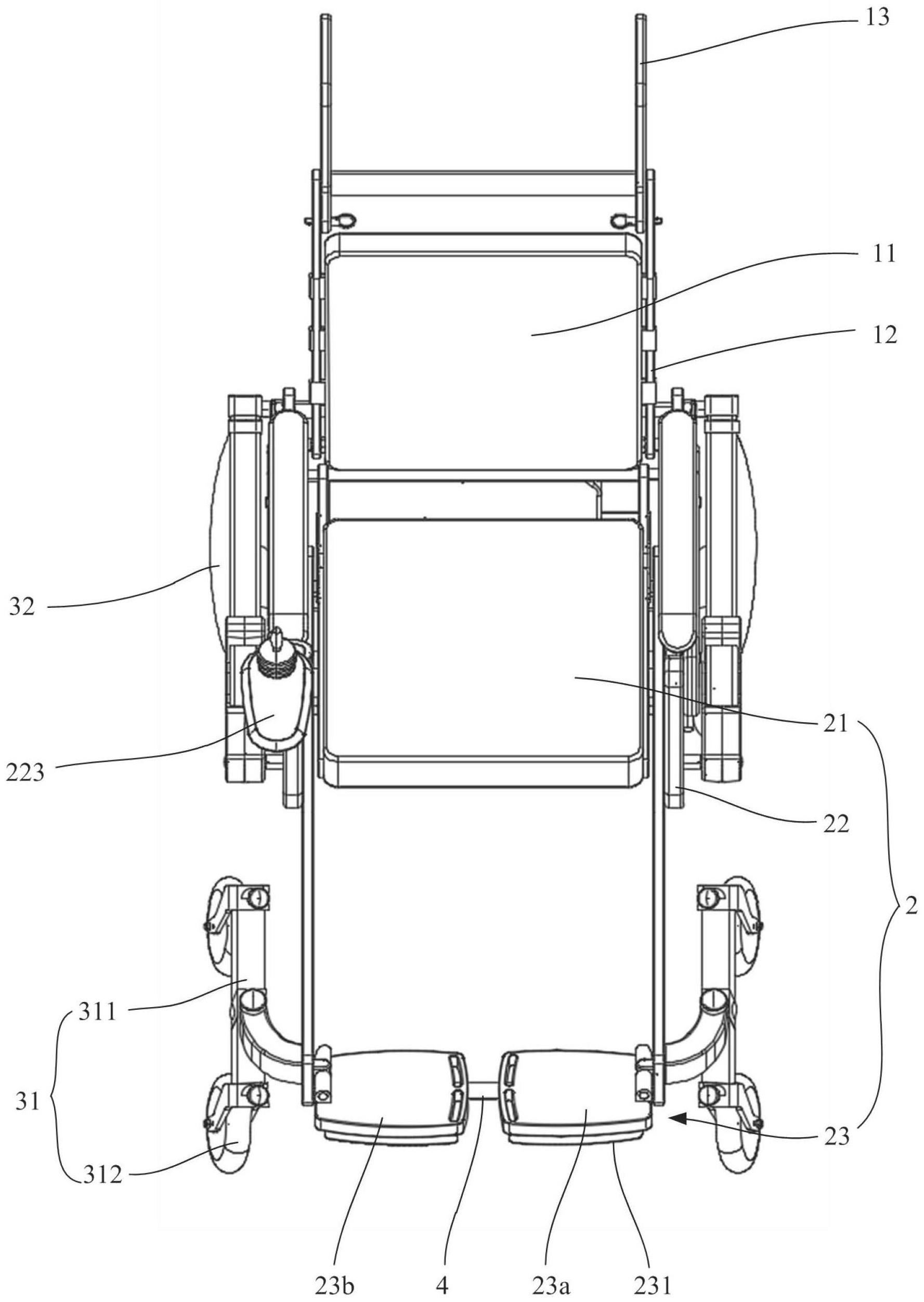
1.一种防倾倒的助行机器人,其特征在于,包括:上部支架(1)、机器人主体(2)和滑轮组件(3),
2.根据权利要求1所述的防倾倒的助行机器人,其特征在于,在所述两个前轮组(31)中,相互对称布置的两个所述支撑轮(312)相互倾斜布置,在远离所述坐板(21)的方向上,两个所述支撑轮(312)之间的间距逐渐增大。
3.根据权利要求2所述的防倾倒的助行机器人,其特征在于,所述两个后驱动轮(32)相互倾斜布置,在远离所述坐板(21)的方向上,所述两个后驱动轮(32)之间的间距逐渐增大。
4.根据权利要求1所述的防倾倒的助行机器人,其特征在于,所述脚踏板(23)包括左脚踏板(23a)和右脚踏板(23b),所述左脚踏板(23a)和所述右脚踏板(23b)间隔布置且相对于所述坐板(21)的中线对称,所述左脚踏板(23a)和所述右脚踏板(23b)相互远离的一端均与所述滑轮连杆折叠支架(22)转动连接,所述左脚踏板(23a)和所述右脚踏板(23b)的转轴均与所述连接杆(311)的转轴平行。
5.根据权利要求4所述的防倾倒的助行机器人,其特征在于,所述防倾倒的助行机器人还包括限位挡臂(4),所述限位挡臂(4)安装于所述左脚踏板(23a)和所述右脚踏板(23b)下方且与所述左脚踏板(23a)和所述右脚踏板(23b)相抵接,所述限位挡臂(4)的两端分别与所述滑轮连杆折叠支架(22)可拆卸连接。
6.根据权利要求1至5任一项所述的防倾倒的助行机器人,其特征在于,所述弹性缓冲垫(231)背向所述脚踏板(23)的一面间隔设置有多个防滑齿(2311)。
7.根据权利要求1至5任一项所述的防倾倒的助行机器人,其特征在于,所述防倾倒的助行机器人还包括甩腿训练架(5),所述甩腿训练架(5)上设置有腿部夹持机构(51),所述甩腿训练架(5)的其中一端转动连接于所述滑轮连杆折叠支架(22)上,所述甩腿训练架(5)的转轴与所述安全带吊杆(13)的转轴平行。
8.根据权利要求7所述的防倾倒的助行机器人,其特征在于,所甩腿训练架(5)呈长条状,所述腿部夹持机构(51)包括沿所述甩腿训练架(5)的长度方向间隔设置的大腿夹扣(511)和小腿夹扣(512),所述甩腿训练架(5)包括大腿摆架(52)和小腿摆架(53),所述大腿摆架(52)的一端设置有用于连接所述滑轮连杆折叠支架(22)的转动轴(521),所述大腿夹扣(511)设置于大腿摆架(52)的另一端,所述大腿摆架(52)的另一端与所述小腿摆架(53)滑动连接,所述小腿夹扣(512)设置于所述小腿摆架(53)远离所述转动轴(521)的一端。
9.根据权利要求8所述的防倾倒的助行机器人,其特征在于,所述小腿摆架(53)包括过渡段(531)和甩动段(532),所述过渡段(531)与所述大腿摆架(52)滑动连接,所述过渡段(531)的另一端与所述甩动段(532)的一端转动连接,所述小腿夹扣(512)设置于所述甩动段(532)的另一端。
10.根据权利要求1至5任一项所述的防倾倒的助行机器人,其特征在于,所述滑轮连杆折叠支架(22)连接有电池模组(221)、动力部件(222)和控制器(223),所述动力部件(222)用驱动所述滑轮连杆折叠支架(22)的折叠和所述后驱动轮(32)转动,所述动力部件(222)和所述控制器(223)均连接于所述电池模组(221)。
技术总结
本发明公开了一种防倾倒的助行机器人,属于康复训练器械技术领域。包括上部支架、机器人主体和滑轮组件,上部支架包括靠背垫、靠背支架和安全带吊杆,靠背垫固定安装于靠背支架上,安全带吊杆与靠背支架位转动连接。机器人主体包括坐板、滑轮连杆折叠支架和脚踏板,脚踏板位于坐板下方,脚踏板底部可拆卸地设置有弹性缓冲垫。滑轮组件包括两个前轮组和两个后驱动轮,前轮组包括连接杆和两个支撑轮,两个支撑轮可转动地安装于连接杆的两端,连接杆的中部与滑轮连杆折叠支架的底部前端转动连接。采用该助行机器人,能够提高行驶于不同平整度地面上的稳定性,避免整体倾倒,增加患者进行代步和康复训练时的安全性。
技术研发人员:彭水平,刘少科,彭志峰,孙伟红
受保护的技术使用者:深圳作为科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!