综合手术台姿态确定及水平复位的方法与流程
本发明涉及一种综合手术台,具体涉及综合手术台姿态确定及水平复位的方法。
背景技术:
1、现有的综合手术台在测量台面的各类角度时,是相对于水平基准面来进行测量的,在生产安装过程中,需要传感器校零,安装精度要求较高,导致生产效率降低。
2、综合手术台现有的角度算法是通过直接比较传感器获取的数据与0°水平基准值的大小来判断台面运动的方向和角度,需要考虑的情况较多,使得手术台响应速度较慢。
3、综合手术台在实现水平复位时,通过反复运动逐渐减小与水平基准值的差距来实现复位,导致水平复位时所用时间较久,动作行程过于复杂。
技术实现思路
1、针对现有技术存在的问题,本发明提供综合手术台姿态确定及水平复位的方法,使用该姿态确定的算法可以简化姿态确定时的计算,将综合手术台面的前后倾斜、左右倾斜和背板的上下折三个动作,每个动作两个方向,共六种确定方式,简化为现在每个动作都使用同一种方式计算,提高了综合手术床的响应速度。
2、本发明的技术方案是:综合手术台姿态确定及水平复位的方法,具体步骤如下:
3、步骤一、采用三个磁敏旋转角度传感器,分别安装在综合手术台背板旋转轴,前后倾斜轴和左右倾斜轴上;综合手术台相应的部位发生运动时,带动相应部位安装的磁敏旋转角度传感器一起转动,当综合手术台床体逆时针转动时,磁敏旋转角度传感器采集的角度数据增大;当综合手术台床体顺时针转动时,磁敏旋转角度传感器采集的角度数据减小;
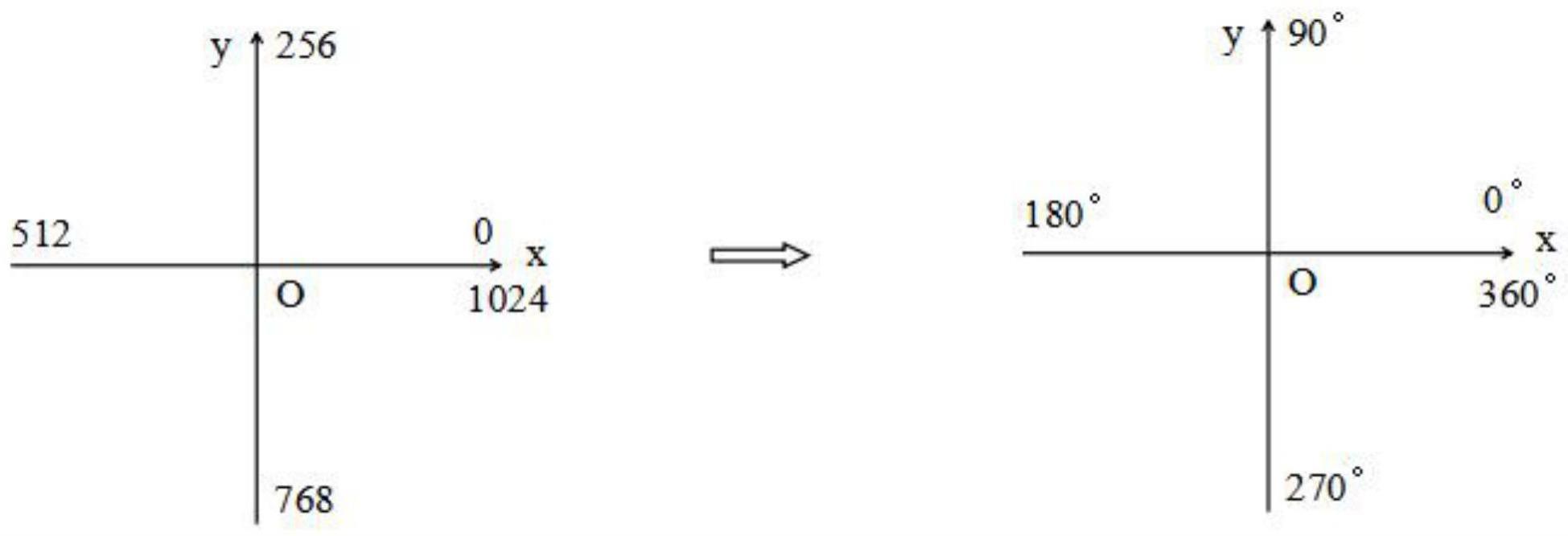
4、步骤二、通过引入平面直角坐标系的概念,将磁敏旋转角度传感器的数字量与综合手术台床体的运动角度量进行对应;所述磁敏旋转角度传感器采集的角度数据为数字量,数据范围为0~1024,则能够设定平面直角坐标系中的第一象限为综合手术台旋转角度0°~90°,对应磁敏旋转角度传感器的数字量0~256,第二象限为综合手术台旋转角度90°~180°,对应磁敏旋转角度传感器的数字量257~512,第三象限为综合手术台旋转角度180°~270°,对应磁敏旋转角度传感器的数字量513~768,第四象限为综合手术台旋转角度270°~360°,磁敏旋转角度传感器的数字量769~1024,实际上综合手术台床体的运动角度不会大于90°;
5、步骤三、由于磁敏旋转角度传感器是直接安装不需要校零,采集综合手术台水平状态时磁敏旋转角度传感器的数据并保存起来,通过以下算法确定手术床姿态:
6、start:水平基准值;
7、end:动作结束后传感器数据;
8、now:运行过程中传感器数据;
9、(1)当水平基准值位于第四象限,即1024>start>768,如果1024>end>start,那么手术台的相应部位发生逆时针运动,运动角度为end-start;如果256>end>0,那么手术台的相应部位发生逆时针运动,运动角度为1024-start+end;
10、(2)当水平基准值位于第一象限,即256>start>0,如果start>end>0,那么手术台的相应部位发生顺时针运动,运动角度为start-end;如果1024>end>768,那么手术台的相应部位发生顺时针运动,运动角度为1024-end+start;
11、(3)当出现上述步骤(1)和步骤(2)以外的其他情况时,如果end>start,那么手术台的相应部位发生逆时针运动,运动角度为end-start;如果end<start,那么手术台的相应部位发送顺时针运动,运动角度为start-end;
12、步骤四、确定好手术床姿态后,即可进行水平复位动作;水平复位时,使综合手术台的相应部位向发送运动的相反方向运动,并实时采集相应磁敏旋转角度传感器的角度数据,直至与水平基准值相等时,停止动作。
13、进一步的,步骤四中,在实时采集相应磁敏旋转角度传感器的角度数据时,在同一时刻多次采集,并计算出now-start的绝对值,并将多次计算出的差值求平均值,当差值的平均值小于1时,即认为手术台的相应部位恢复到了水平位置。
14、本发明的有益效果是:采用此方法之后,传感器可以不用校零,只用正确安装到相应位置即可,方便传感器的安装,提高生产线的生产效率。
15、使用该姿态确定的算法可以简化姿态确定时的计算,将综合手术台面的前后倾斜、左右倾斜和背板的上下折三个动作,每个动作两个方向,共六种确定方式,简化为现在每个动作都使用同一种方式计算,提高了综合手术床的响应速度。
16、综合手术台水平复位时,因准确定位到现在手术床的姿态,可以直接控制综合手术台向水平方向运动,简化了复位时各个动作的行程,提高了床的运行速度。
技术特征:
1.综合手术台姿态确定及水平复位的方法,其特征在于:具体步骤如下:
2.根据权利要求1所述的综合手术台姿态确定及水平复位的方法,其特征在于:步骤四中,在实时采集相应磁敏旋转角度传感器的角度数据时,在同一时刻多次采集,并计算出now-start的绝对值,并将多次计算出的差值求平均值,当差值的平均值小于1时,即认为手术台的相应部位恢复到了水平位置。
技术总结
本发明公开了综合手术台姿态确定及水平复位的方法,采用三个磁敏旋转角度传感器,分别安装在综合手术台背板旋转轴,前后倾斜轴和左右倾斜轴上;使用该姿态确定的算法可以简化姿态确定时的计算,将综合手术台面的前后倾斜、左右倾斜和背板的上下折三个动作,每个动作两个方向,共六种确定方式,简化为现在每个动作都使用同一种方式计算,提高了综合手术床的响应速度。
技术研发人员:唐信文,罗鹏
受保护的技术使用者:上海力申科学仪器有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!