一种基于CT图像的口腔种植精度评估方法与流程
本发明涉及口腔种植评估,具体为一种基于ct图像的口腔种植精度评估方法。
背景技术:
1、口腔种植指的是一种以植入骨组织内的下部结构为基础来支持、固位上部牙修复体的缺牙修复方式。它包括下部的支持种植体和上部的牙修复体两部分。它采用人工材料(如金属、陶瓷等)制成种植体(一般类似牙根形态),经手术方法植入组织内(通常是上下颌)并获得骨组织牢固的固位支持,通过特殊的装置和方式连接支持上部的牙修复体,在使用机器人做手术的过程中,应根据机器人与患者之间的位置关系,设置机器人不同的运行速度,同时需要对机器人的手术位置进行确定,同时需要根据口腔内的具体情况预设种植体的位置,根据预设种植体的位置进行种植。
2、现有的口腔种植之后,缺少能够对种植体的种植精度进行评估的方法,现有的评估方式都是通过肉眼观察或者通过ct查看的方式,但是在进行ct查看时,还是通过医生的肉眼观察评估对种植精度进行比对,其评估的误差较大,评估不够精准,因此缺少一种对种植体的种植精度进行精准有效的评估方法来解决上述问题。
技术实现思路
1、本发明旨在至少在一定程度上解决现有技术中的技术问题之一,通过在口腔内设置配准器,再通过配准器的位置对口腔内的坐标进行配准,从而使种植前和种植后的图像能够进行坐标系配准,使比对有准确的参考依据,从而提高种植精度评估的准确度,以解决现有的口腔种植精度的评估不够精准的问题。
2、为实现上述目的,本发明提供一种基于ct图像的口腔种植精度评估方法,所述评估方法包括:
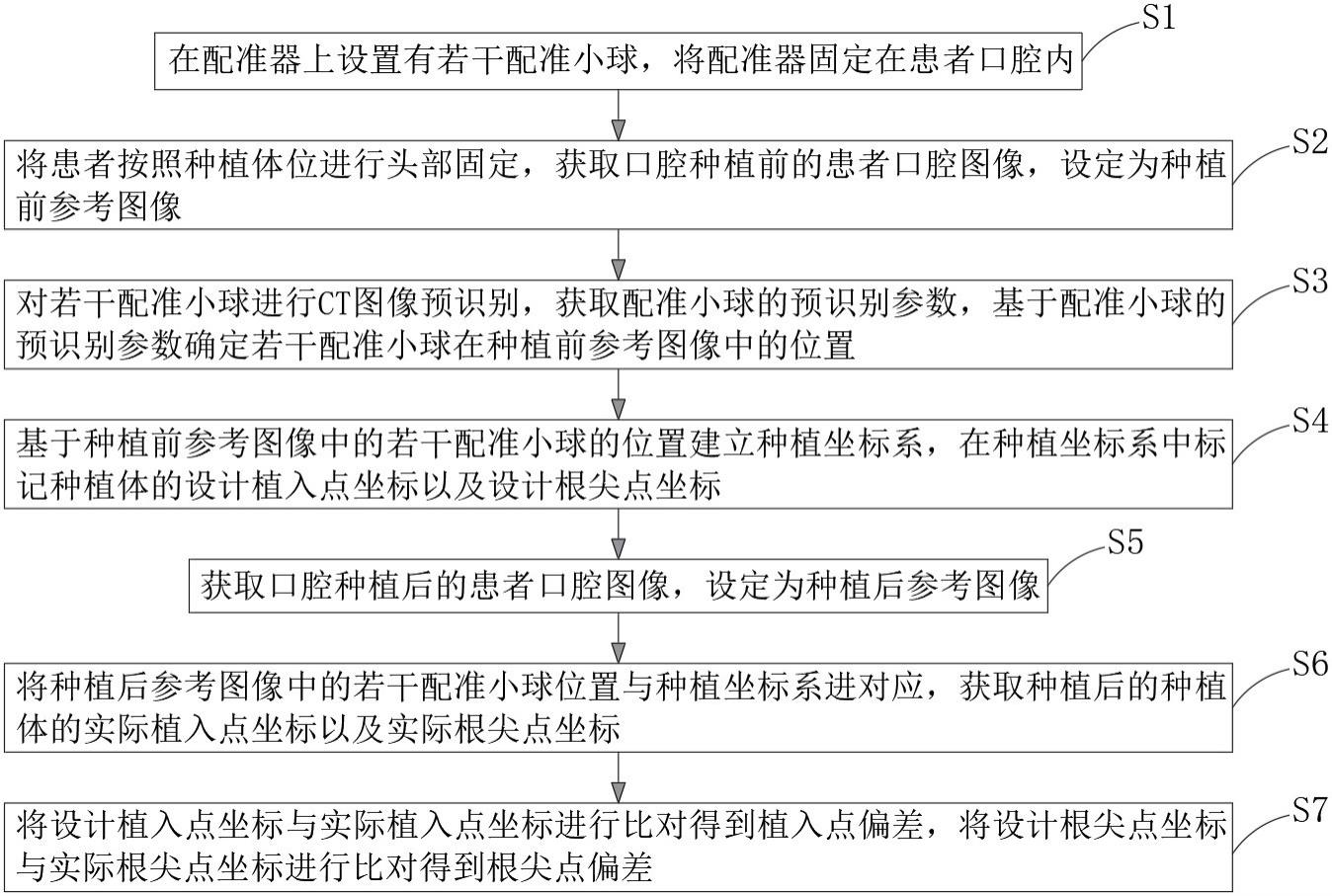
3、在配准器上设置有若干配准小球,将配准器固定在患者口腔内;
4、将患者按照种植体位进行头部固定,获取口腔种植前的患者口腔图像,设定为种植前参考图像;
5、对若干配准小球进行ct图像预识别,获取配准小球的预识别参数,基于配准小球的预识别参数确定若干配准小球在种植前参考图像中的位置;
6、基于种植前参考图像中的若干配准小球的位置建立种植坐标系,在种植坐标系中标记种植体的设计植入点坐标以及设计根尖点坐标;
7、获取口腔种植后的患者口腔图像,设定为种植后参考图像;
8、将种植后参考图像中的若干配准小球位置与种植坐标系进对应,获取种植后的种植体的实际植入点坐标以及实际根尖点坐标;
9、将设计植入点坐标与实际植入点坐标进行比对得到植入点偏差,将设计根尖点坐标与实际根尖点坐标进行比对得到根尖点偏差。
10、进一步地,在配准器上设置有若干配准小球,将配准器固定在患者口腔内包括:获取配准器的三维模型;
11、建立基础三维坐标系,在配准器的三维模型上选取一个配准小球作为参照基点,在基础三维坐标系中选取一个基础对照点,将参照基点与基础对照点进行对应后,将配准器的三维模型对应到基础三维坐标系中;
12、在基础三维坐标系中获取若干配准小球的坐标,分别设定为q1(xq1,yq1,zq1)至qn(xqn,yqn,zqn),n表示若干配准小球的数量。
13、进一步地,对若干配准小球进行ct图像预识别,获取配准小球的预识别参数还包括:对配准小球进行图像预识别处理;
14、在同一拍摄条件下,获取若干组配准器的图像,将若干组配准器的图像中的配准小球区域圈出,设定为预处理小球区域;
15、将预处理小球区域按照第一像素比例进行像素点划分,设定相邻像素划分阈值,将相邻灰度值大于相邻划分阈值的两个像素点进行分隔,圈出参照小球区域;
16、获取参照小球区域内的像素点数量,求取参照小球区域内的若干像素点的灰度值的平均值,设定为参照小球灰度;
17、求取一组配准器的图像内的若干配准小球的参照小球灰度的平均值,设定为比对小球灰度;求取一组配准器的图像内的若干配准小球的像素点数量的平均值,设定为比对像素数量;
18、求取若干组配准器的图像的比对小球灰度的平均值,设定为预识别小球灰度;求取若干配准器的图像的比对像素数量的平均值,设定为预识别像素数量。
19、进一步地,基于配准小球的预识别参数确定若干配准小球在种植前参考图像中的位置还包括:将预识别小球灰度作为预识别灰度获取种植前参考图像中的预识别点位;
20、将预识别点位所在区域按照第一像素比例进行像素点划分,将相邻灰度值大于相邻划分阈值的两个像素点分隔,圈出预识别区域;
21、获取预识别区域内的像素点数量,设定为预识别参考数量;求取预识别参考数量与预识别像素数量之间的差值,设定为预识别数量差值,当预识别数量差值在第一数量差值范围内时,将预识别区域设定为配准小球区域;
22、将配准小球区域提取,分别使用两条横向框选线和两条纵向框选线对配准小球区域进行框选,两条横向框选线相平行,两条纵向框选线相平行,两条横向框线分别与两条纵向框选线相垂直,使配准小球区域完全落入两条横向框选线和两条纵向框选线的相交区域之内,且两条横向框选线和两条纵向框选线与配准小球区域相贴合,将两条横向框选线和两条纵向框选线之间的相交区域设定为矩形框;
23、将矩形框的中心点作为配准匹配点,获取配准小球的标准轮廓圆,将标准轮廓圆的中心与配准匹配点吻合后,设定标准轮廓圆所在区域为配准小球校准区域。
24、进一步地,基于种植前参考图像中的若干配准小球的位置建立种植坐标系还包括:获取三个方位上获取到的种植前参考图像,分别获取三个方位上的种植前参考图像内的若干配准小球区域,其中,三个方位上获取到的种植前参考图像的方位分别与基础三维坐标系的三个轴的方位相同;
25、建立种植坐标系,将三个方位上的种植前参考图像内的若干配准小球区域对应到种植坐标系内,将若干配准小球区域在种植坐标系内的坐标设定为种植前待校准坐标,使用基础三维坐标系中的若干配准小球的坐标与若干种植前待校准坐标进行对应,对种植前待校准坐标进行配准,调整种植坐标系的方位。
26、进一步地,在种植坐标系中标记种植体的设计植入点坐标以及设计根尖点坐标还包括:根据种植前参考图像设定种植体的结构参数,确定种植体在种植前参考图像中的种植区域,种植区域包括植入点的种植深度以及种植体的种植方位,其中,种植体的种植方位为植入点到根尖点的连线方向;
27、基于种植体的植入点在种植区域内的种植深度以及种植方位确定种植体在种植区域内的位置,基于种植体在种植区域内的位置确定设计植入点坐标以及设计根尖点坐标。
28、进一步地,将种植后参考图像中的若干配准小球位置与种植坐标系进对应,获取种植后的种植体的实际植入点坐标以及实际根尖点坐标还包括:获取三个方位上获取到的种植后参考图像,分别获取三个方位上的种植后参考图像内的若干配准小球区域,其中,三个方位上获取到的种植后参考图像的方位分别与基础三维坐标系的三个轴的方位相同;
29、将三个方位上的种植后参考图像内的若干配准小球区域对应到种植坐标系内,将若干配准小球区域在种植坐标系内的坐标设定为种植后待校准坐标,将若干种植后待校准坐标与配准后的种植前待校准坐标进行对应配准;
30、通过配准后的种植后参考图像中的种植体在种植坐标系中的位置,获取种植后的种植体的实际植入点坐标以及实际根尖点坐标。
31、进一步地,将设计植入点坐标与实际植入点坐标进行比对得到植入点偏差,将设计根尖点坐标与实际根尖点坐标进行比对得到根尖点偏差还包括:计算设计植入点坐标与实际植入点坐标在第一方位和第二方位上的第一植入横向偏差以及第二植入横向偏差,将第一植入横向偏差和第二植入横向偏差相加得到植入点的横向偏差;计算设计植入点与实际植入点在第一方位或第二方位上的种植深度偏差,设定为植入点的深度偏差;
32、计算设计根尖点坐标与实际根尖点坐标在第一方位和第二方位上的第一根尖横向偏差以及第二根尖横向偏差,将第一根尖横向偏差和第二根尖横向偏差相加得到根尖点的横向偏差;计算设计根尖点与实际根尖点在第一方位或第二方位上的根尖深度偏差,设定为根尖点的深度偏差。
33、本发明的有益效果:本发明在配准器上设置有若干配准小球,将配准器固定在患者口腔内;通过配准器上的配准小球的位置能够确定前后比对位置的参照一致性,然后将患者按照种植体位进行头部固定,能够使获取到的图像偏差较小,降低配准过程的难度,获取口腔种植前的患者口腔图像,设定为种植前参考图像,然后对若干配准小球进行ct图像预识别,获取配准小球的预识别参数,基于配准小球的预识别参数确定若干配准小球在种植前参考图像中的位置,通过配准器上的配准小球之间的相互位置对种植前参考图像进行初始配准;
34、本发明基于种植前参考图像中的若干配准小球的位置建立种植坐标系,在种植坐标系中标记种植体的设计植入点坐标以及设计根尖点坐标,该设计能够使种植体的坐标在种植坐标系中进行确定;然后获取口腔种植后的患者口腔图像,设定为种植后参考图像;再将种植后参考图像中的若干配准小球位置与种植坐标系进对应,获取种植后的种植体的实际植入点坐标以及实际根尖点坐标,该设计能够对种植体种植后的坐标进行获取,且种植前的种植体的设计坐标与种植后的种植体的坐标能够对应在一个坐标系内,实现比对的相互匹配性,最后将设计植入点坐标与实际植入点坐标进行比对得到植入点偏差,将设计根尖点坐标与实际根尖点坐标进行比对得到根尖点偏差,能够提高对种植精度评估的准确度,能够对种植体的后续校准提供数据支撑。
35、本技术的其他特征和优点将在随后的说明书阐述,并且,部分地从说明书中变得显而易见,或者通过实施本技术了解。本技术的目的和其他优点可通过在所写的说明书、权利要求书以及附图中所特别指出的结构来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!