手术机械臂及手术机器人的制作方法
本发明涉及医疗器械,尤其涉及一种手术机械臂及手术机器人。
背景技术:
1、微创手术的诞生在很大程度上克服了传统外科手术存在的刀口大、出血量大、并发症多以及手术风险大等缺陷。微创手术因为近年来的迅猛发展正逐步获得医务人员与患者的青睐,成为目前医学研究与临床应用的新兴领域。
2、通过手术机器人来辅助医生进行微创手术能够使得手术操作更为灵敏与精确。以达芬奇手术机器人为例,达芬奇手术机器人可以将医生的视野放大十倍,同时有效滤除医生的手部颤动,在微创手术领域具有广泛的临床应用。
3、适用于手术机器人的手术机械臂需要带动手术器具执行手术操作,而手术器具在使用时需要通过伸入皮肤表面上开设的微小创口来实现达到患者体内。这就要求手术器具以稳定、无颤动的状态将皮肤表面上开设的微小创口作为远心不动点执行手术操作。而目前的适用于手术机器人的手术机械臂,在临床表现上尚不能完全满足使用要求。目前的手术机械臂,在对手术器具的载荷能力以及执行精度上均较为薄弱。手术机械臂在载荷能力以及执行精度上的薄弱性限制了手术机器人在临床上的应用。
技术实现思路
1、有鉴于此,有必要提供一种改进的手术机械臂及手术机器人,该手术机械臂的载荷能力以及执行精度提升,应用该手术机械臂的手术机器人在临床上具有更广泛的应用前景。
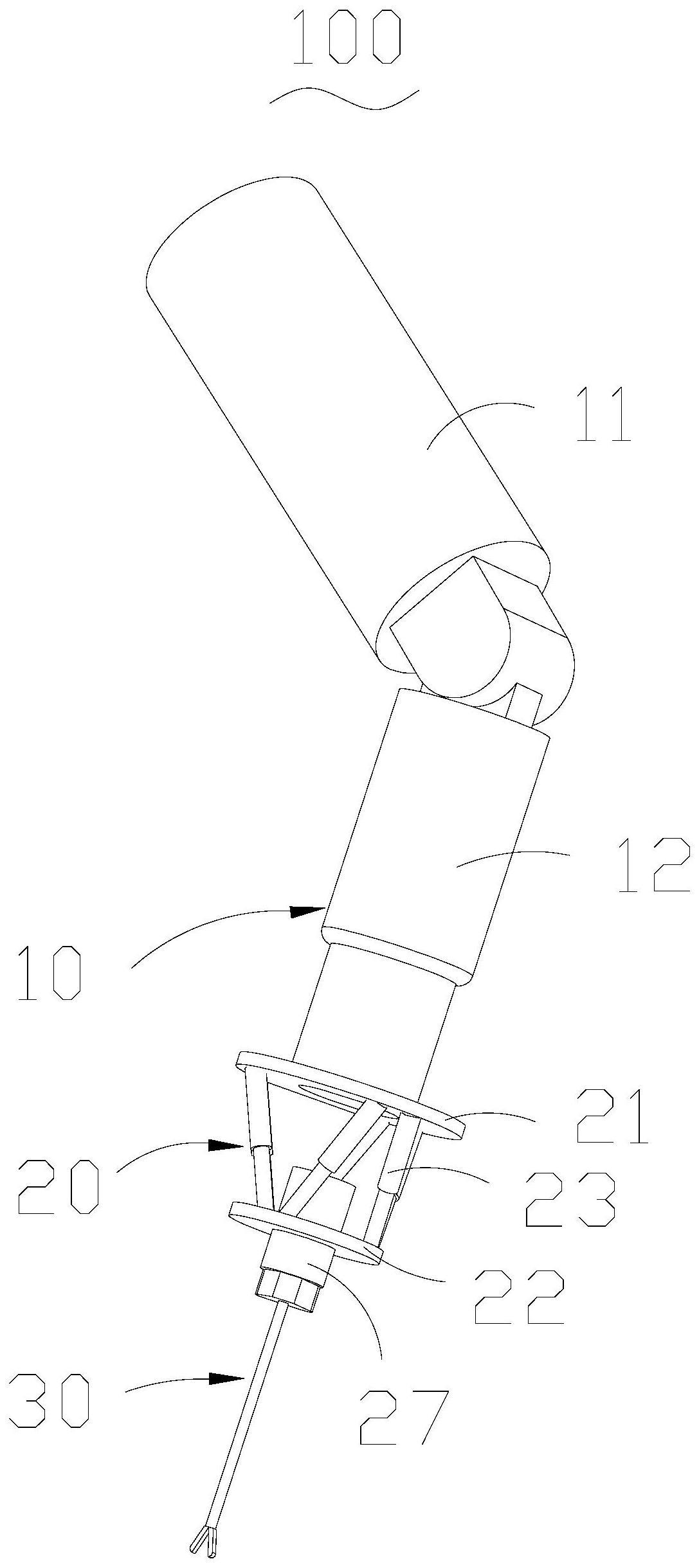
2、本发明提供一种手术机械臂,用于内窥镜微创手术机器人,包括依次连接的术前摆位组件、远心操控组件及执行组件;
3、所述远心操控组件包括静平台、第一动平台以及设置于所述静平台与所述第一动平台之间的多个第一伸缩元件,多个所述第一伸缩元件并联设置;
4、所述静平台相对远离所述第一动平台的一侧固定连接于所述术前摆位组件,所述第一动平台相对远离所述静平台的一侧固定连接于所述执行组件,每个所述第一伸缩元件的两端均分别转动连接于所述静平台与所述第一动平台;
5、所述执行组件具有预设的远心不动点,所述远心不动点为沿所述执行组件的长度方向上的固定不动点;所述远心操控组件具有多个自由度,能够驱动所述所述执行组件以所述远心不动点为摆动中心进行摆动,且所述执行组件的伸缩路径穿过所述远心不动点;
6、所述执行组件包括执行杆及设置于所述执行杆相对远离所述第一动平台一端的手术器具,所述执行杆的前后伸缩运动沿着所述远心不动点运动,所述手术器具的摆动以所述远心不动点为摆动中心;
7、所述执行组件能够在所述术前摆位组件的驱动下实现位置调节,从而所述远心操控组件和所述术前摆位组件实现对所述执行组件的双级调整。
8、与现有技术相比,本发明提供的手术机械臂至少具有以下有益效果:
9、第一动平台、静平台以及位于第一动平台与静平台之间的多个并联设置的第一伸缩元件构成并联机构,利用并联机构的误差非累积特性提高了末端执行组件的运动精度,可利用术前摆位组件将执行组件大致移动到病灶处的位置,利用远心操控组件控制执行组件小幅度范围的内运动,从而控制手术器具进行灵活的手术操作,且有利于位置调整的高效化与精细化。
10、为了使手术机械臂能够更好地满足手术要求,在本发明的一个实施方式中,所述术前摆位组件能够驱动所述执行组件进行大范围的位置调节,所述远心操控组件能够驱动所述执行组件以所述远心不动点为摆动中心进行细微的位置调整,所述手术器具能够进行微移动。
11、如此设置,术前摆位组件用于实现执行组件的大致移动,远心操控组件用于实现执行组件的精准控制,能够减小手术中的位移误差和缩短响应时长,而且执行组件的载荷能力更大,灵活性更高。
12、在本发明的一个实施方式中,远心不动点的位置在单次的手术操作中是选定的,而在不同次的手术操作中是可变化的。
13、为了提高手术机械臂的灵活性,在本发明的一个实施方式中,所述执行组件相对所述远心不动点的摆动极限角度设为±20°,所述执行组件能够在以所述执行组件的伸缩路径为轴且顶角为40°的锥形空间内摆动。
14、如此设置,执行组件比较灵活,能够在较大范围内运动,可以协助医生实现较为复杂的手术操作。
15、为了提高手术机械臂的稳定性,各所述第一伸缩元件与所述第一动平台之间的多个转动连接点共圆设置,各所述第一伸缩元件与所述静平台之间的转动连接点共圆设置;位于所述静平台上的转动连接点所围设形成的圆形直径,是位于所述第一动平台上的转动连接点所围设形成的圆形直径的1.7倍。
16、如此设置,第一动平台在相对静平台运动的过程中具有较小的颤动,各个第一伸缩元件之间的误差总量能够相互弥补,从而使得手术机械臂的稳定性提升,同时可以相对压缩第一动平台与静平台所占用的空间体积,在结构轻量化与高性能之间具有最为平衡的结合性。
17、为了实现第一伸缩元件与第一动平台及静平台之间的转动连接,所述第一伸缩元件的两端分别设置有球铰接头与虎克铰链接头;所述第一伸缩元件通过所述球铰接头连接至所述静平台与所述第一动平台中的一者,并通过所述虎克铰链接头连接至所述静平台与所述第一动平台中的另一者。
18、如此设置,第一伸缩元件的两端能够分别与第一动平台以及静平台实现转动连接,第一伸缩元件的连接性能较佳。
19、在本发明的一个实施方式中,第一伸缩元件的数量为三个、四个、五个或六个,多个第一伸缩元件之间均为独立驱动,所述第一动平台能够带动所述执行组件动作。
20、为了在实现第一伸缩元件与第一动平台及静平台之间转动连接的基础上兼顾成本,所述手术机械臂还包括缸套,所述缸套套设并转动连接于所述第一伸缩元件;所述缸套在相对远离所述第一伸缩元件的一端以及所述第一伸缩元件在相对远离所述缸套的一端上,分别设置有虎克铰链接头;所述缸套与所述第一伸缩元件中的一者,通过对应的所述虎克铰链接头连接至所述第一动平台;所述缸套与所述第一伸缩元件中的另一者,通过对应的所述虎克铰链接头连接至所述静平台。
21、如此设置,第一伸缩元件可以通过制造难度较低、成本低廉的虎克铰链接头便实现第一动平台与静平台之间的动力传输,无需设置造价高昂、容易损坏的球铰接头,具有较佳的性价比优势。
22、为了提高手术机械臂的运动稳定性,所述第一伸缩元件的数量为六个,所述第一伸缩元件与所述第一动平台之间的各转动连接点均相互间隔设置;且所述第一伸缩元件与所述静平台之间的各转动连接点也均相互间隔设置。
23、如此设置,通过采用间隔式的转动连接点的分布形式,减少了各个第一伸缩元件之间的颤动干扰,能够进一步提升手术机械臂的运动稳定性。
24、为了提高手术机械臂的运动稳定性,所述第一伸缩元件与所述第一动平台的各转动连接点之间以就近的方式两两成对,每一组同对的两个转动连接点与所述第一动平台的中心之间均对应形成一个第一夹角,各所述第一夹角之间的大小相等。
25、如此设置,第一伸缩元件在第一动平台上的转动连接点将以两两配对组合的方式设置,手术机械臂的运动稳定性提升,同时便于实现运动学解析。
26、为了进一步提高手术机械臂的运动稳定性,所述第一夹角α的角度范围为15°至60°。
27、如此设置,各个转动连接点之间的夹角范围处在较佳的区间内,不仅有利于保证运动稳定性,也可以通过相对适宜的夹角范围便于实现对各个第一伸缩元件的伸缩量运动解析。
28、为了进一步提高手术机械臂的运动稳定性,所述第一伸缩元件与所述静平台之间的各转动连接点之间以就近的方式两两成对,每一组同对的两个转动连接点与所述静平台的中心之间均对应形成一个第二夹角,各所述第二夹角之间的大小相等。
29、如此设置,第一伸缩元件在静平台上的转动连接点将以两两配对组合的方式设置,手术机械臂的运动稳定性提升,同时便于实现运动学解析。
30、为了进一步提高手术机械臂的运动稳定性,第二夹角角度范围为15°至60°。
31、如此设置,各个转动连接点之间的夹角范围处在较佳的区间内,不仅有利于保证运动稳定性,也可以通过相对适宜的夹角范围便于实现对各个第一伸缩元件的伸缩量运动解析。
32、如此设置,各个转动连接点之间的夹角范围处在较佳的区间内,不仅有利于保证运动稳定性,也可以通过相对适宜的夹角范围便于实现对各个第一伸缩元件的伸缩量运动解析。
33、为了避免手术器具在转动时传动线缆发生缠绕,所述执行组件包括执行杆及设置于所述执行杆相对远离所述第一动平台一端的手术器具,所述第一动平台上设置有转动驱动件,所述转动驱动件连接于所述执行杆并能够驱动所述执行杆与所述手术器具沿所述执行杆的轴向同步转动。
34、如此设置,手术器具将与执行杆同步转动,从而避免了传动线缆在相对执行杆转动时的相互缠绕。
35、为了使得手术器具的运动更加灵活和精准,所述第一动平台上还设置有第一偏转驱动件、第二偏转驱动件以及开合驱动件,所述执行杆中空并容置有传动线缆,所述手术器具通过所述传动线缆连接于所述第一偏转驱动件、第二偏转驱动件以及开合驱动件;
36、所述第一偏转驱动件与所述第二偏转驱动件能够通过所述传动线缆分别带动所述手术器具朝交错的两个不同的方向偏转,所述开合驱动件能够通过所述传动线缆带动所述手术器具张开与闭合。
37、如此设置,手术器具在第一偏转驱动件、第二偏转驱动件以及开合驱动件的协同作用下能够灵活地偏转和开合,多个驱动件同时驱动能够减小驱动时的位移误差和延时误差。
38、为了实现更加复杂的手术内容,所述远心操控组件包括多级相互连接的并联平台,每级所述并联平台均包括相对的两个平台以及位于两个所述平台之间的伸缩元件;
39、其中,多级所述并联平台中相对靠近所述术前摆位组件的并联平台为第一级并联平台,所述第一级并联平台包括所述静平台、所述第一动平台以及设置于所述静平台与所述第一动平台之间的多个第一伸缩元件。
40、如此设置,多级别的所述并联平台能够叠加式的扩大手术器具的活动范围,以协助医生实现更加复杂的手术内容。
41、为了兼顾手术内容的复杂程度以及控制的精准程度,所述并联平台的级数为两级,所述远心操控组件还包括连接于所述第一级并联平台的第二级并联平台,所述第二级并联平台包括第二动平台以及设置于所述第一动平台与所述第二动平台之间的多个第二伸缩元件,所述第二动平台相对远离所述静平台的一侧固定连接于所述执行组件,每个所述第二伸缩元件的两端均分别转动连接于所述第一动平台与所述第二动平台。
42、如此设置,第二动平台能够以第一动平台为基础进行位移活动,双级并联平台的结构设计同时兼顾了对手术复杂性的满足以及对控制精度的保证,避免了级数过大所带来的控制误差过度叠加的情况。
43、为了减小运动误差,同时便于实现运动学解析,多个所述第二伸缩元件与所述第一动平台之间的各转动连接点在所述第一动平台上的排布方式,与多个所述第一伸缩元件与所述静平台之间的各转动连接点在所述静平台上的排布方式相同;及/或,
44、多个所述第二伸缩元件与所述第二动平台之间的各转动连接点在所述第二动平台上的排布方式,与多个所述第一伸缩元件与所述第一动平台之间的各转动连接点在所述第一动平台上的排布方式相同。
45、如此设置,不仅能够简化第一动平台与第二动平台之间的运动学解析步骤,还能减小第二动平台的运动误差;并且便于加工,能够保证加工精度。
46、为了进一步减小运动误差,同时进一步简化运动学解析步骤,在所述第一动平台、所述第二动平台以及所述静平台的各轴向处于重合的状态下,各所述第一伸缩元件与对应的所述第二伸缩元件之间相互平行设置。
47、如此设置,能够进一步简化第一动平台与第二动平台之间的运动学解析步骤,减小第二动平台的运动误差。
48、为了实现对执行组件的大范围摆位,所述术前摆位组件包括移动臂及伸缩臂,所述伸缩臂设置于所述移动臂与所述静平台之间并转动连接于所述移动臂。
49、如此设置,执行组件能够在术前摆位组件的驱动下实现大范围的位置调节,从而利用远心操控组件与摆位组件实现对执行组件的双级调整,有利于位置调整的高效化与精细化。
50、为了实现对力学信息的检测,所述第一动平台上还设置有传感器,所述传感器安装于所述第一动平台或者所述手术机械臂中相对位于所述第一动平台前端的器件中;所述传感器连接于所述执行杆并用于检测所述手术器具受到的环境力及/或环境力矩。
51、如此设置,手术机械臂由于将执行杆与手术器具设置为同步转动,可以使得位于执行杆内部的连接线缆将以整体的方式运动,避免了传统结构中连接线缆缠绕导致无法实现可靠力学传感器的弊端,从而使得传感器能够实现对手术器具所受到的环境力及/或环境力矩的精确测量,传感器相对手术器具,不会受到第一伸缩元件伸缩时的绕动干扰,在测量时的精确度有了极大的提高。
52、为了进一步提高检测精度,所述传感器安装于所述转动驱动件上,所述转动驱动件能够驱动所述传感器、所述执行杆以及所述手术器具均沿所述执行杆的轴向同步转动。
53、如此设置,转动驱动件与传感器选择安装在第一动平台上,能够为转动驱动件与传感器的安装提供极大的便利,相比于传感器安装在手术机械臂中相对位于第一动平台前端的器件的方案,在安装精度上有了极大的降低。本发明还提供一种手术机器人,包括手术机械臂,所述手术机械臂为上述任意一项所述的手术机械臂。
54、本发明提供的手术机器人,通过应用上述的手术机械臂提高了自身的运动精度以及载荷能力,能够实现更高精度、更大强度的临床手术,具有更为广泛的应用前景。
- 还没有人留言评论。精彩留言会获得点赞!