三自由度显微外科手术机器人腕式终端夹镊
本发明涉及医疗器械,尤其涉及三自由度显微外科手术机器人腕式终端夹镊。
背景技术:
1、随着手术机器人技术的发展,为应对不同的手术场景和手术需求,发展出了各式各样的用于手术机器人的器械。在更苛刻的显微外科手术场景,在手术过程中需要手术夹镊可以灵活的调整,以适应各种手术场景需要。为了实现对手术夹镊灵活准确的调整,对其灵巧性提出了更高的要求。
技术实现思路
1、本发明的目的在于提供三自由度显微外科手术机器人腕式终端夹镊通过三个自由度运动,提高灵巧性。
2、为达到本发明之目的,采用如下技术方案:
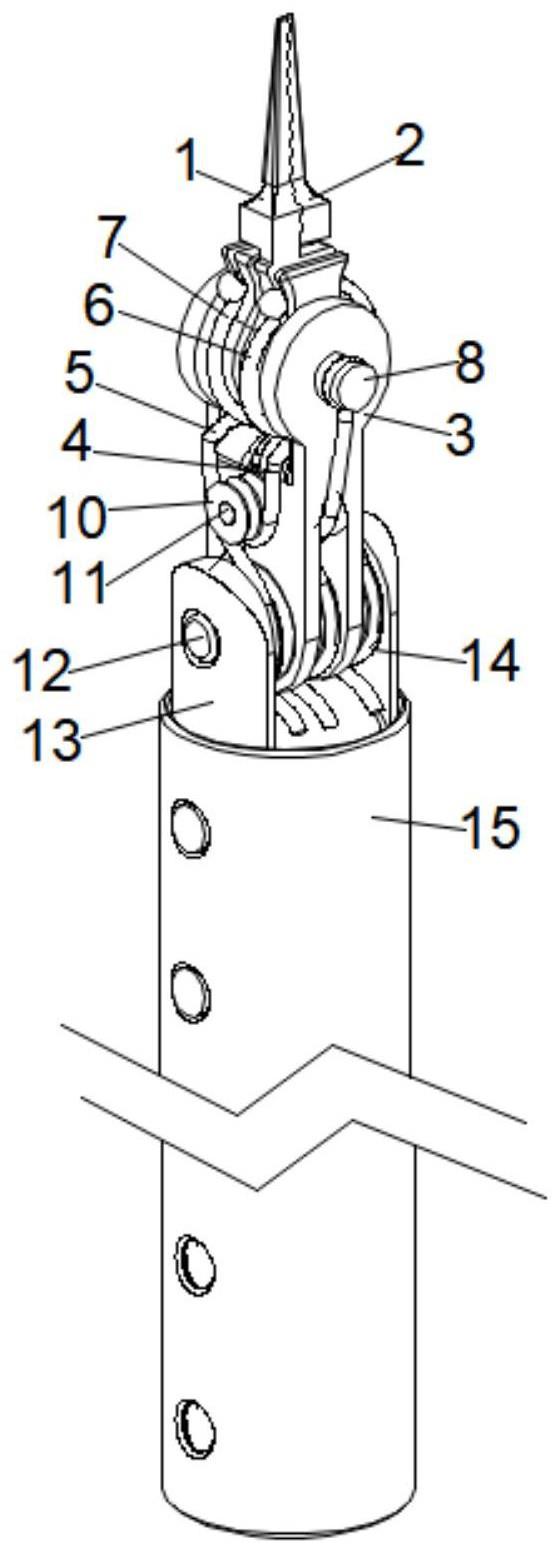
3、三自由度显微外科手术机器人腕式终端夹镊,包括枢接在掌座的上部并且相对咬合的第一夹钳和第二夹钳,所述第一夹钳和所述第二夹钳绕着钳轴转动,其特征在于,还包括:
4、第二驱动丝从第一小滑轮的滑槽内引出的一端从第一夹钳的端部和掌座之间的缝隙内穿过,之后弯折为圆弧形以包裹在第一夹钳的一侧;第四驱动丝从第二小滑轮的滑槽内引出的一端从第一夹钳的端部和掌座之间的缝隙内穿过,之后弯折为圆弧形并包裹在第一夹钳的另一侧;通过第二驱动丝和第四驱动丝驱动第一夹钳沿着顺时针或逆时针方向转动,以实现腕式终端夹镊在第一个自由度的运动;
5、第一驱动丝的从第一小滑轮的滑槽内引出的一端从第二夹钳的端部和掌座之间的缝隙内穿过,之后弯折为圆弧形并包裹在第二夹钳的一侧;第三驱动丝从第二小滑轮的滑槽内引出的一端从第二夹钳的端部和掌座之间的缝隙内穿过,之后弯折为圆弧形以包裹在第二夹钳的另一侧;通过第一驱动丝和第三驱动丝驱动第二夹钳沿着顺时针或逆时针方向转动,以实现腕式终端夹镊在第二个自由度的运动;
6、第三大滑轮枢接在掌座的下部;第五驱动丝和第六驱动丝分别从第三大滑轮的两侧的滑槽内引出,第五驱动丝的引出端绑定至钳轴的一端,第六驱动丝的引出端绑定至钳轴的另一端;通过第五驱动丝和第六驱动丝驱动所述掌座绕着掌座轴转动,以带动腕式终端夹镊在和第一夹钳、第二夹钳垂直的空间内转动,实现腕式终端夹镊在第三个自由度的运动。
7、本发明的有益效果:
8、(1)本申请中,通过第二驱动丝和第四驱动丝驱动第一夹钳沿着顺时针或逆时针转动,以实现腕式终端夹镊在第一个自由度的运动,可以将第一夹钳调整至各个位置。
9、通过第一驱动丝和第三驱动丝驱动第二夹钳沿着顺时针或逆时针转动,以实现腕式终端夹镊在第二个自由度的运动,可以将第二夹钳调整至和需要手术的部位对准,以利于准确的进行操作。
10、通过第五驱动丝和第六驱动丝驱动所述掌座绕着掌座轴转动,以带动腕式终端夹镊在和第一夹钳、第二夹钳垂直的空间内转动,将腕式终端夹镊在垂直于第一夹钳、第二夹钳垂直的空间内调整方向和位置,以利于准确的对准需要手术的部位。
11、本申请中,第二驱动丝和第四驱动丝可以驱动第一夹钳实现第一个自由度运动,第一驱动丝和第三驱动丝可以驱动第二夹钳实现第二个自由度运动,第五驱动丝和第六驱动丝带动掌座在垂直于第一夹钳、第二夹钳的空间内转动,以实现第三个自由度的运动,以提高腕式终端夹镊的灵活性。
技术特征:
1.三自由度显微外科手术机器人腕式终端夹镊,包括枢接在掌座的上部并且相对咬合的第一夹钳和第二夹钳,所述第一夹钳和所述第二夹钳绕着钳轴转动,其特征在于,还包括:
2.根据权利要求1所述三自由度显微外科手术机器人腕式终端夹镊,其特征在于,第一大滑轮和第二大滑轮枢接在所述掌座的下部的,第一小滑轮和第二小滑轮枢接在掌座的中部的,所述第一小滑轮、所述第二小滑轮分别处于所述第一大滑轮、所述第二大滑轮的正上方且轴向平行;
3.根据权利要求2所述三自由度显微外科手术机器人腕式终端夹镊,其特征在于,在所述钳轴的两个端部都开设有环槽,第五驱动丝的引出端绑定至钳轴的一端的环槽内,第六驱动丝的引出端绑定至钳轴的另一端的环槽内。
4.根据权利要求2所述三自由度显微外科手术机器人腕式终端夹镊,其特征在于,还包括腕座,所述腕座包括底座,在所述底座的顶端的两侧分别设置有沿着长度方向延伸的安装部;第一大滑轮、第二大滑轮和第三大滑轮通过掌座轴可转动的设置在两个安装部之间。
5.根据权利要求4所述三自由度显微外科手术机器人腕式终端夹镊,其特征在于,所述腕座的顶端为弧形的引导部;第一驱动丝、第二驱动丝、第三驱动丝、第四驱动丝、第五驱动丝和第六驱动丝均沿着引导部滑动并连接至电机。
6.根据权利要求1所述三自由度显微外科手术机器人腕式终端夹镊,其特征在于,所述第一夹钳包括第一钳柄,在第一钳柄的一端设置有第一钳口,并从第一钳柄的端部向内开设有第一凹槽;第二驱动丝和第四驱动丝设置在第一凹槽内,且端部对接形成一个圆环,以稳定的带动第一钳柄转动。
7.根据权利要求6所述三自由度显微外科手术机器人腕式终端夹镊,其特征在于,第二驱动丝和第四驱动丝的端部均是第一球形结构,第一球形结构的直径大于第一凹槽的宽度。
8.根据权利要求1所述三自由度显微外科手术机器人腕式终端夹镊,其特征在于,所述第二夹钳包括第二钳柄,在所述第二钳柄的一端设置有第二钳口,并从所述第二钳柄的端部向内开设有第二凹槽;第一驱动丝和第三驱动丝设置在第二凹槽内,且端部对接形成一个圆环,以稳定的带动第二夹钳转动。
9.根据权利要求8所述三自由度显微外科手术机器人腕式终端夹镊,其特征在于,第一驱动丝和第三驱动丝的端部均是第二球形结构,第二球形结构的直径大于第二凹槽的宽度。
10.根据权利要求1所述三自由度显微外科手术机器人腕式终端夹镊,其特征在于,所述掌座的一端是相平行的两个第二支撑板,另一端是相平行的两个第一支撑板,第一支撑板所在平面和第二支撑板所在平面垂直;第一支撑板横跨两个第二支撑板;圆弧形状的支撑部和第一支撑板设置在第二支撑板的同一端;
技术总结
本发明公开三自由度显微外科手术机器人腕式终端夹镊,包括第一夹钳和第二夹钳,第二驱动丝从第一夹钳的端部和掌座之间穿过包裹在第一夹钳的一侧;第四驱动丝从第一夹钳的端部和掌座之间穿过包裹在第一夹钳的另一侧;第二驱动丝和第四驱动丝驱动第一夹钳转动在第一个自由度运动;第一驱动丝从第二夹钳的端部和掌座之间的缝隙内穿过包裹在第二夹钳的一侧;第三驱动丝从第二夹钳的端部和掌座之间的缝隙内穿过包裹在第二夹钳的另一侧;第一驱动丝和第三驱动丝驱动第二夹钳转动实现第二个自由度的运动;第五驱动丝和第六驱动丝驱动掌座绕着掌座轴转动,带动腕式终端夹镊在和第一夹钳、第二夹钳垂直的空间内转动实现第三个自由度的运动。
技术研发人员:边桂彬,叶强,任晗,李桢
受保护的技术使用者:中国科学院自动化研究所
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!