一种模块化多自由度肌电假肢手控制系统及控制方法
本发明涉及一种模块化假肢手控制系统及其使用方法,更具体地,涉及一种模块化多自由度肌电假肢手控制系统及其控制方法。
背景技术:
1、人工假肢的研究可以应用到高端医疗装备、生机电一体化智能机器人、危险环境勘查、灾难救援装备、国防装备以及辅助残疾人进行康复工程训练等多个领域,其科学技术成果可辐射,因此具有重要的战略意义,到目前为止,基于单自由度的仿人型机器人手部结构已经十分成熟,但单自由度并不能不满足仿真假手的灵活度需求,且对于用户意图使用外界辅助操纵,未能直观通过用户残肢意图控制,使得假手的应用受到了限制。同时,目前的仿人型手部结构各个指节间均采用固定耦合,或者采用复杂的机械联动结构,自由度低,难以更换部件,对于不同残疾程度患者通用性差,泛化性低。
技术实现思路
1、发明目的:本发明的目的是提供一种能够识别手势及用户意图,并进行多自由度控制的模块化多自由度肌电假肢手控制系统,本发明的另一目的是提供该系统的控制方法。
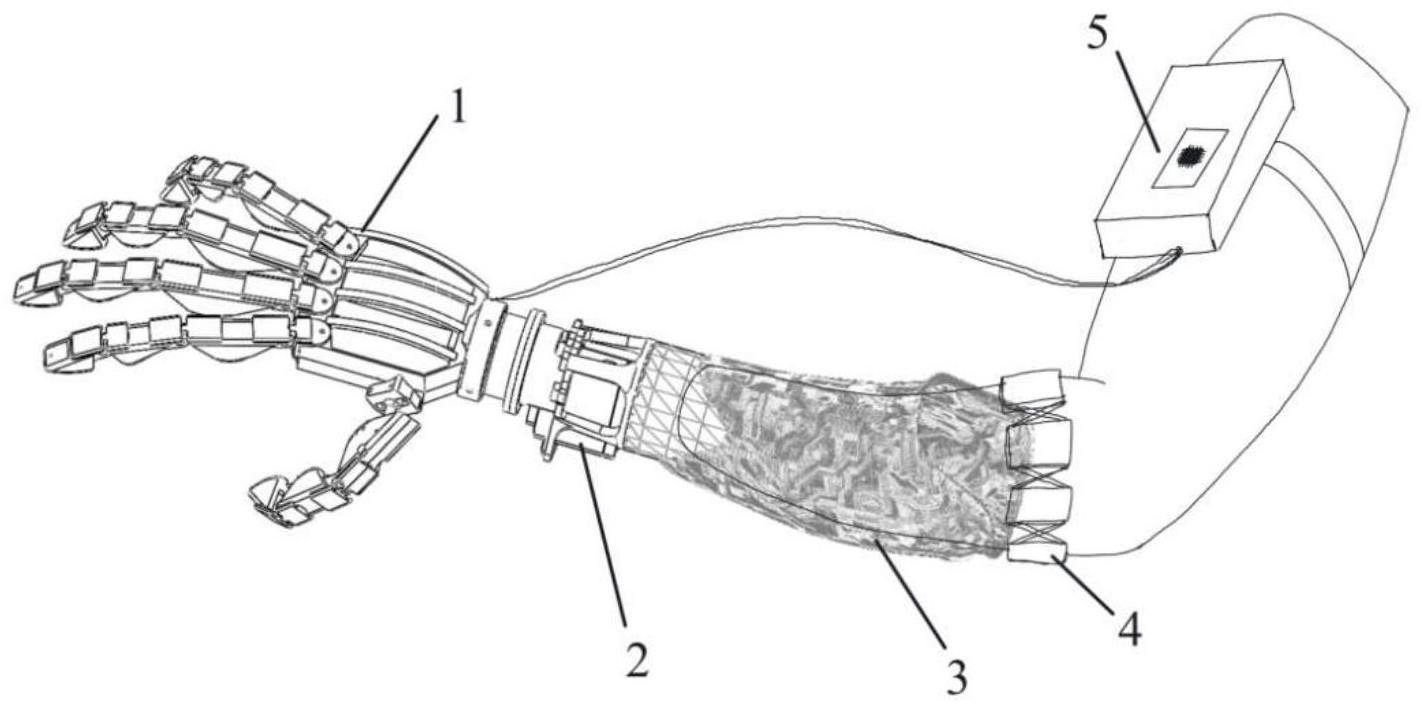
2、技术方案:本发明所述模块化多自由度肌电假肢手控制系统,其特征在于,包括模块化机械手、机械手腕、残肢接受腔、肌电传感手环和控制模块,所述模块化机械手和残肢接受腔分别安装在机械手腕两端,所述肌电传感手环穿戴在小臂上,大臂上固定所述控制模块,所述控制模块里面集成有数据处理器、控制单元电路板、电池,所述数据处理器向控制单元电路板发出采集表面肌电信号的指令使肌电传感手环采集表面肌电信号并接受数据进行处理生成手势预测模型。
3、其中,机械手包括模块化机械四指、模块化机械拇指、机械手掌、手指连接件和手腕连接件,模块化机械四指和所述模块化机械拇指均含有三个模块化指节,所述三个模块化指节具体为第一指节、第二指节、第三指节,所述三个模块化指节通过螺栓和多圈弹性线顺次连接,并通过牵引线进行运动耦合,其中所述模块化机械四指的每个第三指节通过手指连接件固定在机械手掌上;所述模块化机械拇指的第三指节由拇指第三指节正面和拇指第三指节反面组合而成,与机械手掌上球状关节通过双橡胶圈连接。机械手腕包括舵机固定件、舵机、舵机顶部套件、轴承法兰件、轴承、连接轴和手部连接件,所述舵机固定件集成在残肢接受腔,舵机固定件通过螺栓与舵机和舵机顶部套件固定,轴承与舵机转子连接,连接轴一端与轴承连接,另一端与手部连接件连接,手部连接件与腕部连接件之间通过螺栓连接。
4、本发明所述的多自由度肌电假手控制系统的控制方法包括以下步骤:
5、(s1)令使用者戴上肌电传感手环(4),然后连接好控制模块;
6、(s2)令使用者根据实验动作序列完成手势,控制模块(5)的数据处理器向控制单元电路板发出采集表面肌电信号的指令,控制单元电路板控制肌电传感手环(4)采集表面肌电信号后储存至控制单元电路板并上传至控制模块(5)的数据处理器;
7、(s3)控制模块(5)的数据处理器接收表面肌电信号并输入机器学习算法生成手势预测模型;
8、(s4)使用者穿戴上残肢接受腔,并连接好机械手和机械手腕,利用生成的手势预测模型进行实时手势识别,控制单元电路板控制手腕、机械手的多个自由度运动。
9、其中,步骤s3中机器学习算法对数据处理包括以下步骤:
10、(s31)对原始表面肌电信号进行预处理以提取特征,标注手势标签;
11、(s32)对带有标签的肌电信号特征进行k近邻分类,进而进行训练;
12、(s33)对于实时输入信号提取特征,利用k近邻分类原则,得到对应预测标签。
13、有益效果:本发明与现有技术相比,其显著优点是:1、整套装置可用于完全腕断离的残疾患者,提供腕部旋转功能;2、手指驱动采用线牵引的欠驱动,可以实现对抓握物体形状的自适应;3、模块化设计,各个指节可独立组装拆卸,每个指节可以独立更换,也可以将单独指节拼接成为独立的体驱假肢手指,可以适应精确到指节缺失的不同残疾程度患者;4、摒弃复杂的外骨骼机械联动装置,驱动装置后置,实现手部的轻量化;5、能够对连续手势进行识别进行识别;6、完整实现人类自然手与手腕全部自由度,假手更加灵巧。
技术特征:
1.一种模块化多自由度肌电假肢手控制系统,其特征在于,包括模块化机械手(1)、机械手腕(2)、残肢接受腔(3)、肌电传感手环(4)和控制模块(5),所述模块化机械手(1)和残肢接受腔(3)分别安装在机械手腕(2)两端,所述肌电传感手环(4)穿戴在小臂上,大臂上固定所述控制模块(5),所述控制模块(5)里面集成有数据处理器、控制单元电路板、电池,所述数据处理器向控制单元电路板发出采集表面肌电信号的指令使肌电传感手环采集表面肌电信号并接受数据进行处理生成手势预测模型。
2.根据权利要求1所述的模块化多自由度肌电假肢手控制系统,其特征在于,所述机械手(1)包括模块化机械四指(9)、模块化机械拇指(8)、机械手掌(6)、手指连接件(13)和手腕连接件(7),所述模块化机械四指(9)和所述模块化机械拇指(8)均含有三个模块化指节,所述三个模块化指节具体为第一指节(10)、第二指节(11)、第三指节(12),所述三个模块化指节通过螺栓顺次连接,并通过牵引线进行运动耦合,其中所述模块化机械四指(9)的每个第三指节(12)通过手指连接件(13)固定在机械手掌(6)上;所述模块化机械拇指(8)的第三指节由拇指第三指节正面(14)和拇指第三指节反面(15)组合而成,与机械手掌(6)上球状关节连接。
3.根据权利要求1所述的模块化多自由度肌电假肢手控制系统,其特征在于,所述机械手腕(2)包括舵机固定件(22)、舵机(21)、舵机顶部套件(20)、轴承法兰件(18)、轴承(19)、连接轴(17)和手部连接件(16),所述舵机固定件(22)集成在残肢接受腔(3),舵机固定件(22)通过螺栓与舵机(21)和舵机顶部套件(20)固定,轴承(19)与舵机(21)转子连接,连接轴(17)一端与轴承(19)连接,另一端与手部连接件(16)连接,手部连接件(16)与腕部连接件(7)之间通过螺栓连接。
4.根据权利要求2所述的模块化多自由度肌电假肢手控制系统,其特征在于,所述第一指节(10)、第二指节(11)、第三指节(12)之间通过多圈弹性线连接进行运动耦合。
5.根据权利要求2所述的模块化多自由度肌电假肢手控制系统,其特征在于,所述模块化机械拇指(8)的第三指节通过双橡胶圈与机械手掌(6)的球状关节连接。
6.一种权利要求1-5之一所述的模块化多自由度肌电假肢手控制系统的控制方法,其特征在于,该方法包括以下步骤:
7.根据权利要求6所述的多自由度肌电假手控制系统的控制方法,其特征在于,步骤s3中机器学习算法对数据处理包括以下步骤:
技术总结
本发明公开了一种模块化多自由度肌电假肢手控制系统及控制方法,该系统包括模块化机械手、机械手腕、残肢接受腔、控制模块以及肌电传感手环,机械手指模块安装在机械手上,机械手和残肢接受腔分别安装在机械手腕两端,小臂上穿戴肌电传感手环,大臂上固定舵机、控制模块,舵机通过牵引线连接机械手,该系统的控制方法包括以下步骤:首先令使用者穿戴上多通道肌电传感手环和接受腔,连接舵机和控制模块;然后令使用者完成手势,采集表面肌电信号后上传至数据处理器;控制模块的数据处理器接收表面肌电信号并输入机器学习算法生成手势预测模型;使用者控制机械手腕、机械手的多个自由度运动。该系统能够对连续手势进行识别,做出多自由度的手势。
技术研发人员:宋爱国,李锦豪,林立洲,郭丰恺
受保护的技术使用者:东南大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!