具有锁定结构的介入器械输送系统的制作方法
本申请涉及医疗设备领域,特别是涉及具有锁定结构的介入器械输送系统。
背景技术:
1、介入器械的输送系统一般包括配置于近端供操作者一侧操控的控制手柄,若干细长的滑动嵌套的导管,控制手柄的近端为控制端且与各导管连接,控制手柄的远端为工作端且可介入体内并通过相互配合完成介入器械的输送、释放或回收等,因而控制手柄一般配置滑动或旋转的部件,用于驱动各导管之间沿轴向的相对运动。
2、现有技术中,输送系统的锁定结构一般为相配合的卡槽与活动部件,但在锁定过程中活动部件与卡槽的相对位置会存在错位的情况,如活动部件可能抵靠在槽壁上,需要再进一步偏移相对位置,才能进入锁定状态。因此,上述的锁定结构无法精准的锁止在任意位置,且其精度受限于卡槽的数量和密度。
技术实现思路
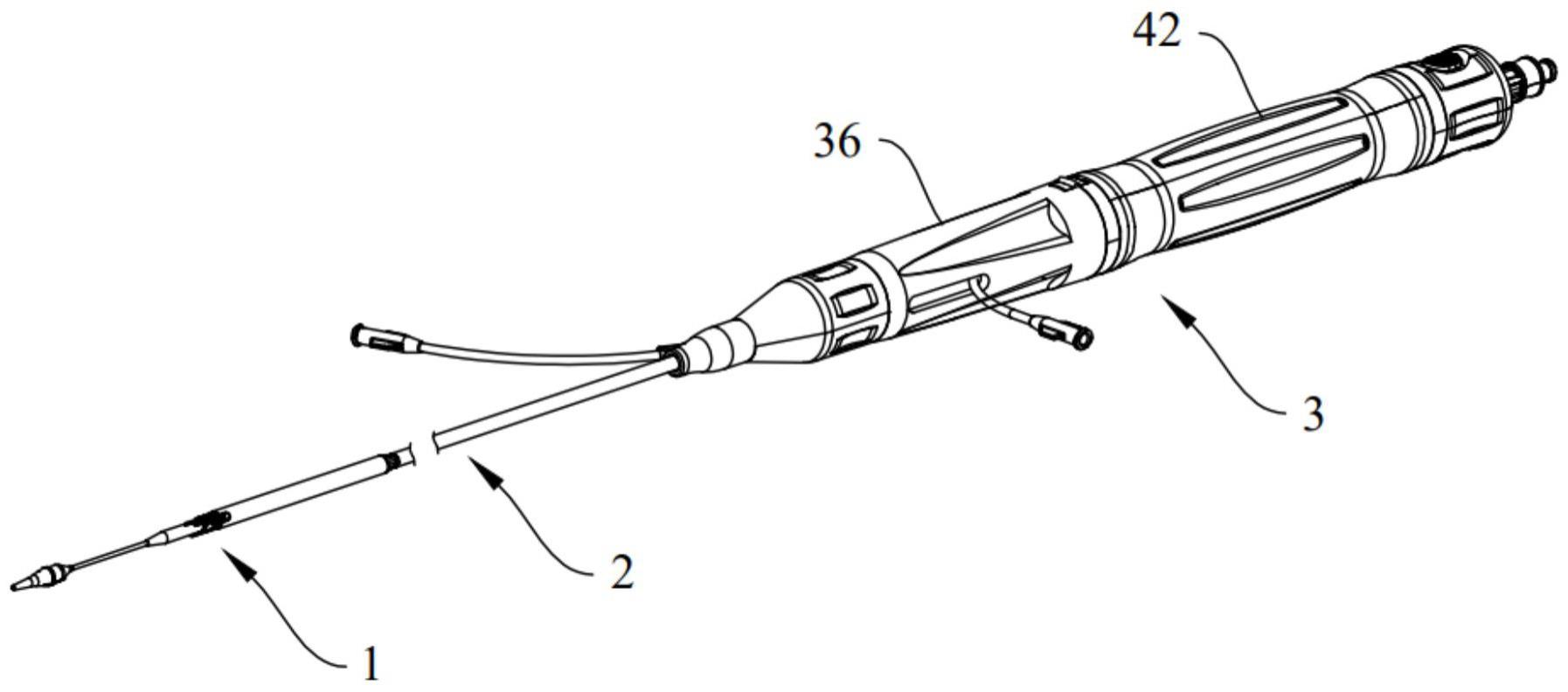
1、为了解决上述技术问题,本申请公开了一种具有锁定结构的介入器械输送系统,具有相对的远端和近端以及延伸于远端和近端之间的轴向,所述介入器械输送系统包括导管组件以及连接于导管组件近端的控制手柄,所述导管组件中包括内鞘管组件和外鞘管,所述内鞘管组件和所述外鞘管两者远端的径向间隙为用于容置介入器械的装载位,所述内鞘管组件和所述外鞘管配置为能够相对运动,使所述外鞘管包覆或暴露所述装载位;
2、所述控制手柄包括第一手柄以及多套驱动机构,各套驱动机构与导管组件中对应的管件传动配合;
3、其中一套驱动机构包括:
4、驱动套,转动安装于所述第一手柄,所述驱动套的其中一部分为插接段;
5、所述第一手柄的其中一部分为处在所述驱动套外周的、与所述插接段配合的锁合部,所述锁合部的至少一部分为径向可形变的施力部,所述施力部具有与所述驱动套相作用、限制所述驱动套旋转的锁定状态,以及解除限制的释锁状态;
6、弹性锁紧环,套设于所述插接段外周,在所述锁定状态下、所述施力部与所述弹性锁紧环相抵并限制所述驱动套旋转;
7、所述锁合部的外周转动套设有操作环,所述操作环的内壁具有径向内凸的工作部,所述工作部与所述施力部相配合,所述工作部随所述操作环运动以切换所述施力部的状态。
8、以下还提供了若干可选方式,但并不作为对上述总体方案的额外限定,仅仅是进一步的增补或优选,在没有技术或逻辑矛盾的前提下,各可选方式可单独针对上述总体方案进行组合,还可以是多个可选方式之间进行组合。
9、可选的,所述驱动机构还包括活动座,所述活动座沿轴向滑动安装于所述第一手柄,所述驱动套处在所述活动座的外周;
10、所述外鞘管的近端连接至所述活动座,所述驱动套与所述活动座之间螺纹传动配合。
11、可选的,所述锁合部为筒状结构,所述筒状结构侧壁的其中一部分兼做所述施力部,所述施力部与周边部位之间带有释放形变的镂空区。
12、可选的,所述施力部为多个,且沿筒状结构周向间隔分布。
13、可选的,所述施力部在筒状结构周向上的跨度至少为1/6圆周。
14、可选的,所述施力部的内侧带有第一防滑齿。
15、可选的,所述驱动套的其中一部分为与所述锁合部配合的插接段,所述控制手柄还包括套设于所述插接段外周的弹性锁紧环,在所述锁定状态下、所述施力部与所述弹性锁紧环相抵并限制所述驱动套旋转。
16、可选的,所述弹性锁紧环和所述插接段之间设有相互配合的防滑结构,所述防滑结构包括以下方式中的至少一者:
17、第二防滑齿,分布在所述弹性锁紧环的内壁;
18、第三防滑齿,分布在所述插接段的外壁。
19、可选的,所述第二防滑齿和所述第三防滑齿相互啮合。
20、可选的,所述操作环的外壁设有径向外凸的凸起。
21、可选的,所述施力部为一个或沿锁合部周向间隔布置的多个,所述操作环的内壁沿周向交替分布有凹陷区以及作为所述工作部的内凸区,
22、在锁定状态下、所述施力部的外侧与所述内凸区相抵;
23、在释锁状态下、所述施力部的外侧与所述凹陷区对应。
24、可选的,所述凹陷区和内凸区之间通过坡面过渡衔接。
25、可选的,所述第一手柄包括:
26、支撑体,所述活动座滑动安装于所述支撑体,所述驱动套转动安装于所述支撑体的外周;
27、中间套,固定于所述支撑体,所述中间套的近端侧处在所述支撑体的外周并作为所述锁合部;
28、第一壳体,包裹固定在所述中间套的外周,且与所述锁合部的径向之间带有第一间隙,所述操作环转动安装于所述第一间隙且至少一部分暴露于所述第一壳体。
29、本申请所提供的具有锁定结构的介入器械输送系统,在介入器械的输送、释放、回收等操作功能方面能达到更佳的操控效果,改善临床医生等操作人员的操作体验,具体的有益技术效果将在具体实施方式中进一步阐释。
技术特征:
1.具有锁定结构的介入器械输送系统,具有相对的远端和近端以及延伸于远端和近端之间的轴向,所述介入器械输送系统包括导管组件以及连接于导管组件近端的控制手柄,所述导管组件中包括内鞘管组件和外鞘管,所述内鞘管组件和所述外鞘管两者远端的径向间隙为用于容置介入器械的装载位,所述内鞘管组件和所述外鞘管配置为能够相对运动,使所述外鞘管包覆或暴露所述装载位;
2.根据权利要求1所述的具有锁定结构的介入器械输送系统,其特征在于,所述驱动机构还包括活动座,所述活动座沿轴向滑动安装于所述第一手柄,所述驱动套处在所述活动座的外周;
3.根据权利要求1所述的具有锁定结构的介入器械输送系统,其特征在于,所述锁合部为筒状结构,所述筒状结构侧壁的其中一部分兼做所述施力部,所述施力部与周边部位之间带有释放形变的镂空区。
4.根据权利要求3所述的具有锁定结构的介入器械输送系统,其特征在于,所述施力部为多个,且沿筒状结构周向间隔分布。
5.根据权利要求4所述的具有锁定结构的介入器械输送系统,其特征在于,所述施力部在筒状结构周向上的跨度至少为1/6圆周。
6.根据权利要求3所述的具有锁定结构的介入器械输送系统,其特征在于,所述施力部的内侧带有第一防滑齿。
7.根据权利要求1所述的具有锁定结构的介入器械输送系统,其特征在于,所述弹性锁紧环和所述插接段之间设有相互配合的防滑结构,所述防滑结构包括以下方式中的至少一者:
8.根据权利要求7所述的具有锁定结构的介入器械输送系统,其特征在于,所述第二防滑齿和所述第三防滑齿相互啮合。
9.根据权利要求1所述的具有锁定结构的介入器械输送系统,其特征在于,所述操作环的外壁设有径向外凸的凸起。
10.根据权利要求1所述的具有锁定结构的介入器械输送系统,其特征在于,所述施力部为一个或沿锁合部周向间隔布置的多个,所述操作环的内壁沿周向交替分布有凹陷区以及作为所述工作部的内凸区,
11.根据权利要求10所述的具有锁定结构的介入器械输送系统,其特征在于,所述凹陷区和内凸区之间通过坡面过渡衔接。
12.根据权利要求2所述的具有锁定结构的介入器械输送系统,其特征在于,所述第一手柄包括:
技术总结
本申请公开了一种具有锁定结构的介入器械输送系统,包括导管组件以及控制手柄,所述导管组件中包括能够相对运动的内鞘管组件和外鞘管;所述控制手柄包括第一手柄以及多套驱动机构,其中一套驱动机构包括:驱动套,其中一部分为插接段;第一手柄的其中一部分与插接段配合的锁合部,锁合部的至少一部分为施力部,施力部具有锁定状态以及解除限制的释锁状态;弹性锁紧环;锁合部的外周转动套设有操作环,操作环的内壁具有径向内凸的工作部,工作部与施力部相配合,工作部随操作环运动以切换施力部的状态。本申请能快速的对相应管件锁定,且在介入器械的输送、释放、回收等操作功能方面能达到更佳的操控效果。
技术研发人员:张志飞,罗建方,李捷,曾桂容,刘伟伟,马甜,刘兆刚,郑明睿
受保护的技术使用者:杭州启明医疗器械股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!