三维牙齿模型的牙齿排列方法、装置以及电子设备与流程
本发明涉及三维牙齿调整领域,具体而言,涉及一种三维牙齿模型的牙齿排列方法、装置以及电子设备。
背景技术:
1、在目前的隐形正畸牙齿诊疗的应用场景中,计算机辅助设计(computer ai deddes ign,cad)与口腔医学的交叉融合,使得虚拟牙齿矫治技术成为研究热点。运用计算机技术对牙齿数字模型进行排列,这一方面,分析三维空间中各颗牙齿的正畸移动方向能够作为医生制定治疗计划的参考,另一方面,将数字化三维牙齿模型的排列过程进行可视化展示,可以让患者预先了解矫治结果,因此,研究牙齿排列过程具有重要意义。
2、传统上,牙齿排列工作由人工完成。motohash i和kuroda于1999年提出将数字化牙颌按单颗牙齿分离,并采用人工的方式完成排牙。人工排牙通常的做法是定义排牙坐标系与牙齿局部坐标系,并根据临床经验对错颌牙列生成一条牙弓线作为辅助,人为地将上下颌的牙齿牵引至牙弓线附近。此过程让一位训练有素的排牙技师操作,大约需要15~20mi n,而且还会存在视觉误差影响排牙结果。
3、综上,人工排牙虽能够达到正畸治疗的要求,但效率很低。
技术实现思路
1、本发明实施例提供了一种三维牙齿模型的牙齿排列方法、装置以及电子设备,以至少解决人工排牙效率低的技术问题。
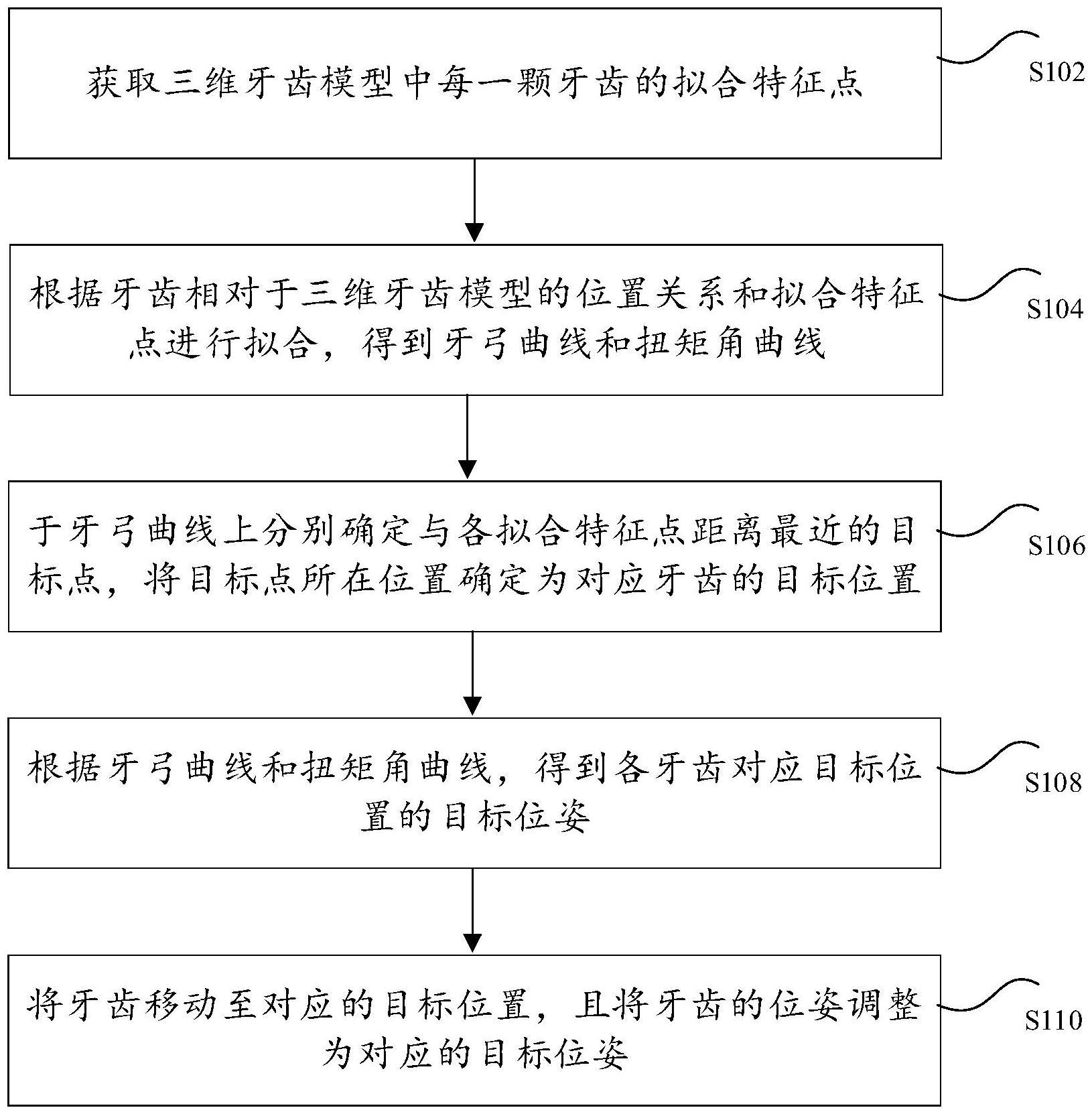
2、根据本发明实施例的一个方面,提供了一种三维牙齿模型的牙齿排列方法,包括:获取三维牙齿模型中每一颗牙齿的拟合特征点;根据上述牙齿相对于上述三维牙齿模型的位置关系和上述拟合特征点进行拟合,得到牙弓曲线和扭矩角曲线;于上述牙弓曲线上分别确定与各上述拟合特征点距离最近的目标点,将上述目标点所在位置确定为对应牙齿的目标位置;根据上述牙弓曲线和上述扭矩角曲线,得到各上述牙齿对应上述目标位置的目标位姿;将上述牙齿移动至对应的上述目标位置,且将上述牙齿的位姿调整为对应的上述目标位姿。
3、根据本发明实施例的另一方面,提供了一种三维牙齿模型的牙齿排列装置,包括:获取模块,用于获取三维牙齿模型中每一颗牙齿的拟合特征点;拟合模块,用于根据上述牙齿相对于上述三维牙齿模型的位置关系和上述拟合特征点进行拟合,得到牙弓曲线和扭矩角曲线;第一确定模块,用于于上述牙弓曲线上分别确定与各上述拟合特征点距离最近的目标点,将上述目标点所在位置确定为对应牙齿的目标位置;第二确定模块,用于根据上述牙弓曲线和上述扭矩角曲线,得到各上述牙齿对应上述目标位置的目标位姿;移动模块,用于将上述牙齿移动至对应的上述目标位置,且将上述牙齿的位姿调整为对应的上述目标位姿。
4、作为一种可选的示例,上述装置还包括:建立模块,用于建立上述三维牙齿模型的总坐标系,以及上述牙齿的局部坐标系;第三确定模块,用于根据上述总坐标系和上述局部坐标系,得到上述位置关系。
5、作为一种可选的示例,上述装置还包括:第四确定模块,用于在上述牙齿的当前状态满足预设条件的情况下,确定上述牙齿的位姿调整完成;其中,上述预设条件包括:上述牙齿在上述局部坐标系的第一坐标轴的方向与上述牙弓曲线于上述目标点的切线方向一致;上述牙齿在上述局部坐标系的第二坐标轴的方向与上述第一坐标轴垂直,且与上述总坐标系的第一坐标轴的角度满足上述扭矩角曲线。
6、作为一种可选的示例,上述拟合模块包括:第一拟合单元,用于确定上述牙齿的拟合特征点的x值,以及上述牙齿的局部坐标系的第二坐标轴与上述总坐标系的第一坐标轴的夹角;对上述拟合特征点的x值以及上述夹角进行拟合处理,得到上述扭矩角曲线。
7、作为一种可选的示例,上述拟合模块包括:第二拟合单元,用于根据所述拟合特征点对预先建立的理想牙弓曲线模型拟合求解,得到初始牙弓曲线和校正参数;其中,所述校正参数包括横向平移量、纵向平移量和旋转角度;根据所述校正参数,将所述初始牙弓曲线的位置进行调整,得到牙弓曲线;其中,所述牙弓曲线处于所述理想牙弓曲线模型上。
8、作为一种可选的示例,上述装置还包括:模拟模块,用于在上述获取三维牙齿模型中每一颗牙齿的拟合特征点之后,在上述三维牙齿模型的牙位上不存在目标牙齿的情况下,根据上述目标牙齿的模拟数据得到上述目标牙齿的拟合特征点;其中,上述模拟数据为采用与上述目标牙齿同颌对称牙位上牙齿的数据模拟上述目标牙齿得到。
9、作为一种可选的示例,上述模拟数据包括目标牙齿的坐标;上述装置还包括:第五确定模块,用于确定上述目标牙齿同颌对称牙位上的牙齿在总坐标系下的第一坐标值;将第二坐标值确定为上述目标牙齿的坐标,其中,上述第二坐标值与上述第一坐标值关于目标平面对称,上述目标平面为上述总坐标系的第一坐标轴的坐标值为零的平面。
10、作为一种可选的示例,上述装置还包括:调整模块,用于在获取三维牙齿模型中每一颗牙齿的拟合特征点之前,将上述三维牙齿模型的位置调整到目标位置,且将上述三维牙齿模型的朝向调整到目标朝向。
11、作为一种可选的示例,上述调整模块包括:调整单元,用于确定上述三维牙齿模型的中心点、第一向量与第二向量,其中,上述第一向量和第二向量用于调整上述三维牙齿模型的朝向,上述中心点用于调整上述三维牙齿模型的位置;调整上述三维牙齿模型,以使上述第一向量与上述三维牙齿模型的总坐标系的z轴重合,上述第二向量与上述总坐标系的x轴重合,且上述中心点与上述总坐标系的原点重合。
12、作为一种可选的示例,上述调整单元包括:第一确定子单元,用于按照从上述三维牙齿模型的门牙到最后一颗磨牙的顺序,遍历上述三维牙齿模型的牙齿,确定上述三维牙齿模型上每一颗牙齿的质心;将遍历到的第一颗左右两侧均未缺牙的牙齿质心和最后一颗左右两侧均未缺牙的牙齿质心的第一质心连线的中心作为上述中心点。
13、作为一种可选的示例,上述调整单元包括:第二确定子单元,用于按照从上述三维牙齿模型的最后一颗磨牙到门牙的顺序遍历上述三维牙齿模型的牙齿,确定上述三维牙齿模型上每一颗牙齿的质心;将遍历到的第一颗左右两侧均未缺牙的牙齿质心到最后一颗左右两侧均未缺牙的牙齿质心的第二质心连线确定为上述第二向量;将上述第二质心连线的中心确定为辅助点;将上述辅助点到上述中心点的向量确定为辅助向量;将上述第二向量与上述辅助向量的乘积确定为上述第一向量。
14、作为一种可选的示例,上述获取模块包括:处理单元,用于将每一颗上述牙齿作为当前牙齿;根据上述三维牙齿模型确定上述当前牙齿的第一特征点与第二特征点;根据上述当前牙齿所属的类型,采用与上述类型匹配的装置为上述当前牙齿确定第三特征点;从上述第一特征点、上述第二特征点与上述第三特征点中确定上述当前牙齿的拟合特征点。
15、作为一种可选的示例,上述处理单元包括:第三确定子单元,用于在摆正上述三维牙齿模型后,从上述三维牙齿模型上截取目标顶点和多边形面片;确定上述目标顶点的直线向量;确定上述目标顶点和上述多边形面片的目标包围盒,其中,上述目标包围盒的x轴方向为上述直线向量的方向;根据上述目标包围盒将上述三维牙齿模型分割为颊侧部分和舌侧部分;计算上述颊侧部分的三维牙齿模型的第一包围盒;将上述颊侧部分的三维牙齿模型的顶点中,与上述第一包围盒顶部两端点最接近的两个点作为上述当前牙齿的第一特征点与第二特征点。
16、作为一种可选的示例,上述第三确定子单元还用于:在上述当前牙齿为第一类型的牙齿的情况下,将上述颊侧部分的三维牙齿模型的上述当前牙齿的顶点中,与上述第一包围盒底部最接近的点作为上述当前牙齿的第三特征点;在上述当前牙齿为第二类型的牙齿的情况下,将上述颊侧部分的三维牙齿模型的上述当前牙齿的顶点中,与上述第一包围盒顶部最接近的点作为上述当前牙齿的第三特征点;在上述当前牙齿为第三类型或第四类型的牙齿的情况下,提取上述当前牙齿的第二包围盒;从上述第二包围盒中,确定出第一顶点集合与第二顶点集合;根据上述第二顶点集合,确定上述当前牙齿的窝沟方向;将上述第二包围盒的方向调整为与上述窝沟方向一致;根据调整后的上述第二包围盒,将上述当前牙齿分成四个部分;对于每一个部分的上述当前牙齿,在包含上述第一顶点集合中的顶点的情况下,将上述第一顶点集合中的顶点中距离上述第二包围盒的顶部最近的顶点作为上述当前牙齿的上述第三特征点;对于每一个部分的上述当前牙齿,在未包含上述第一顶点集合中的顶点的情况下,从上述当前牙齿的当前部分中的一个顶点向上述第二包围盒的中心遍历顶点,将遍历的顶点中,距离上述第二包围盒的顶部最近的点作为上述当前牙齿的上述第三特征点。
17、作为一种可选的示例,上述处理单元包括:第四确定子单元,用于在上述当前牙齿为第一类型或者第四类型的牙齿的情况下,将上述当前牙齿的第一特征点与第二特征点的连线的中点作为拟合特征点;在上述当前牙齿为第二类型的牙齿的情况下,将上述当前牙齿的第三特征点作为拟合特征点;在上述当前牙齿为第三类型的牙齿的情况下,将上述当前牙齿的第一特征点作为拟合特征点。
18、作为一种可选的示例,上述装置还包括:重调整模块,用于在根据上述牙齿相对于上述三维牙齿模型的位置关系和上述拟合特征点进行拟合,得到牙弓曲线之后,根据预设的比例系数,对第二类型和第三类型的牙齿对应的上述拟合特征点的y坐标数值进行调整;再次进行牙弓曲线拟合。
19、作为一种可选的示例,上述装置还包括:碰撞检测模块,用于通过碰撞检测对上述牙齿进行x轴方向上的调整;在x轴方向调整后,对上述牙齿进行z轴方向的调整;根据上下颌咬合关系对上颌进行y轴方向的调整;根据碰撞检测对上述牙齿进行z轴方向上的调整。
20、作为一种可选的示例,上述碰撞检测模块包括:第一碰撞检测单元,用于将每一个牙区的第一颗牙保持位姿不变水平移动到与目标平面碰撞的位置,其中,上述目标平面为x=0的平面;将每一个牙区的上述第一颗牙齿后的每一颗牙齿作为当前牙齿,执行如下操作:在上述当前牙齿的前一颗牙齿存在的情况下,通过上述当前牙齿与上述前一颗牙齿的碰撞检测调整上述当前牙齿的位姿。
21、作为一种可选的示例,上述碰撞检测模块包括:第二碰撞检测单元,用于根据每一颗牙齿的拟合特征点的坐标确定司匹曲线,其中,在缺牙的情况下,使用缺牙位置对称牙位上的牙齿的拟合特征点模拟缺牙位置的拟合特征点;根据每一颗牙齿在上述司匹曲线上的z坐标值,确定是否调整上述司匹曲线;按照调整后的上述司匹曲线对上述牙齿的z轴方向进行调整。
22、作为一种可选的示例,上述碰撞检测模块包括:第三碰撞检测单元,用于将上述三维牙齿模型的上颌延z轴向上移动预定距离,其中,上述预定距离为上述上颌中z值最小的拟合特征点和上述下颌中z值最大的拟合特征点的差值;将上述上颌中的每一颗牙齿通过碰撞检测向下移动直到碰撞到下颌牙齿。
23、根据本发明实施例的又一方面,还提供了一种存储介质,该存储介质中存储有计算机程序,其中,该计算机程序被处理器运行时执行上述三维牙齿模型的牙齿排列方法。
24、根据本发明实施例的又一方面,还提供了一种电子设备,包括存储器和处理器,上述存储器中存储有计算机程序,上述处理器被设置为通过上述计算机程序执行上述的三维牙齿模型的牙齿排列方法。
25、在本发明实施例中,采用了获取三维牙齿模型中每一颗牙齿的拟合特征点;根据上述牙齿相对于上述三维牙齿模型的位置关系和上述拟合特征点进行拟合,得到牙弓曲线和扭矩角曲线;于上述牙弓曲线上分别确定与各上述拟合特征点距离最近的目标点,将上述目标点所在位置确定为对应牙齿的目标位置;根据上述牙弓曲线和上述扭矩角曲线,得到各上述牙齿对应上述目标位置的目标位姿;将上述牙齿移动至对应的上述目标位置,且将上述牙齿的位姿调整为对应的上述目标位姿的方法,由于在上述方法中,在对三维牙齿模型中的牙齿进行排牙的过程中,可以通过拟合特征点确定牙弓曲线和扭矩角曲线,并在牙弓曲线上确定距离拟合特征点最近的目标点,将牙齿移动到牙弓曲线上的目标点上,且调整牙齿的位姿为目标位姿,从而实现了自动排牙的目的,进而解决了手工排牙效率低的技术问题。
- 还没有人留言评论。精彩留言会获得点赞!