一种手术机器人控制装置的智能监测系统的制作方法
本申请涉及医疗器械,具体而言,涉及一种手术机器人控制装置的智能监测系统。
背景技术:
1、手术机器人系统是集多项现代高科技手段与一体的综合体,其用途广泛,在临床上有大量的应用,随着医疗机器人技术的蓬勃发展,手术机器人助手已经被广泛使用,人工膝关节置换,是近现代逐渐发展起来的一种治疗膝关节疾病的新技术,它能非常有效地根除晚期膝关节病痛,极大地提高病人的生活质量,在发达国家比较流行,目前在国内处于快速发展的阶段。
2、使用手术机器人的关节置换手术中,其中关键的步骤是解剖标记,需要频繁的使用控制装置来进行骨骼配准采点,但是在手术的过程中,控制装置因超出设计使用次数而损坏,会严重影响手术进度。
技术实现思路
1、本申请解决的问题是现有控制装置在配准时,可能因为超出设计使用次数而损坏,影响手术进度。
2、为解决上述问题,本申请提供了一种手术机器人控制装置的智能监测系统,其包括:
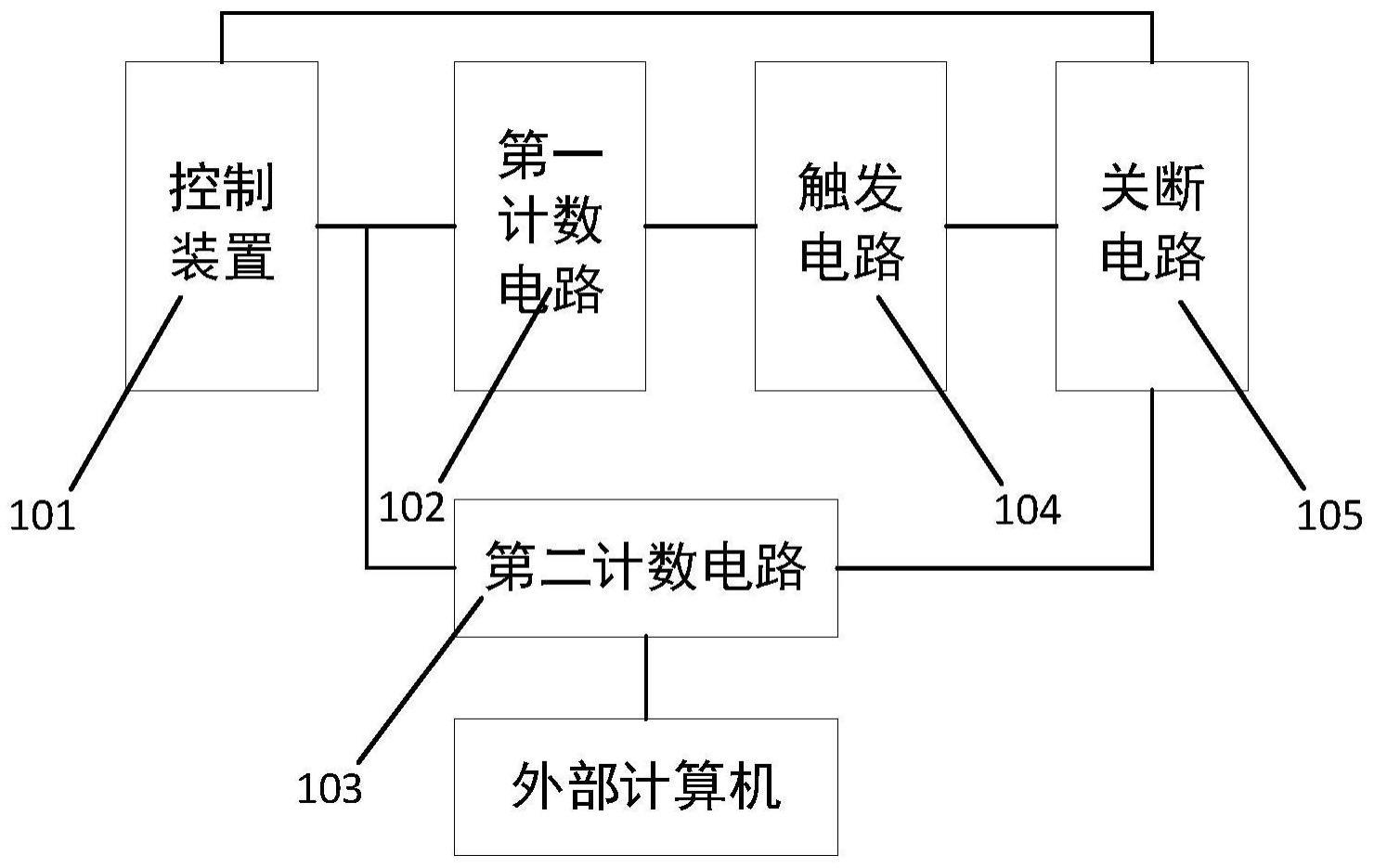
3、控制装置,至少具有一组常开触点,用于输出所述控制装置的闭合信号;
4、第一计数电路,与所述控制装置的常开触点连接,用于记录所述控制装置的闭合次数;
5、第二计数电路,输入端与所述控制装置的常开触点连接,输出端与计算机串行接口连接,用于将记录的所述控制装置的闭合次数输出至外部计算机。
6、进一步地,还包括触发电路,所述触发电路与所述第一计数电路连接,用于在所述第一计数电路记录的闭合次数超出预设阈值后,对外发出第一触发信号。
7、进一步地,所述控制装置为脚踏开关,所述智能监测系统还包括关断电路,所述关断电路的输入端与所述触发电路、所述第二计数电路连接,输出端与所述脚踏开关连接;
8、所述第二计数电路用于在接收到所述外部计算机的第一指令后,向所述关断电路发出第二触发信号;所述第一指令为外部计算机判断所述第二计数电路记录的闭合次数超出预设阈值后发出的指令;
9、所述关断电路用于在接收到所述第一触发信号和/或第二触发信号后,将所述脚踏开关与电源的通路断开。
10、进一步地,所述关断电路为延时电路,用于在接收到所述第一触发信号和/或第二触发信号,并延时预设时长后,将所述脚踏开关与电源的通路断开。
11、进一步地,所述第一计数电路包括依次连接的多个计数模块;
12、最先位置的所述计数模块的输入端与所述脚踏开关的常开触点连接,输出端与后一所述计数模块的输入端连接,用于记录闭合次数中的个位数字;
13、最后位置的所述计数模块的输入端与前一所述计数模块的输入端连接,用于记录闭合次数中的最大位数字;
14、其余的所述计数模块的输入端与前一所述计数模块的输出端连接,输出端与后一所述计数模块的输入端连接,用于记录闭合次数中的对应位数字。
15、进一步地,所述触发电路包括至少一个逻辑芯片,所述逻辑芯片与对应位的计数模块的多个预设输出端连接,用于在该计数模块所述预设输出端均输出高电平时对外输出高电平。
16、进一步地,所述关断电路包括时间继电器,所述时间继电器的输入端与第二计数电路的输出端连接,且与所述触发电路的输出端通过第三防反二极管连接,所述时间继电器的常闭触点与所述控制装置连接。
17、进一步地,所述关断电路还包括延时按钮,所述延时按钮与所述时间继电器串联,用于在被按压时对所述关断电路进行一次通断循环。
18、进一步地,还包括电池电路,所述电池电路包括第一继电器、电池、第一防反二极管和第二防反二极管;所述第一继电器与电源形成回路,所述电池与所述第一继电器的常闭触点连接,且通过所述第一防反二极管、第二防反二极管与电源形成回路,用于在电源断开后进行供电;所述第一防反二极管和所述第二防反二极管极性反向连接。
19、进一步地,还包括清零按钮,所述清零按钮与所述第二计数电路的清零端口、所述计数模块的清零端口连接,用于在被按压后清零所述第二计数电路和所述计数模块。
20、本申请中,通过计数电路记录控制装置的闭合次数,从而可以在控制装置到达设计使用次数之前对控制装置进行更换,避免控制装置因超出设计使用次数而损坏,影响手术进度。
21、本申请中,通过第一计数电路和第二计数电路同时记录控制装置的闭合次数,从而可以通过外部计算机和显示电路的两种不同方式对外进行展示,避免因单个展示方式故障或不便展示的问题导致使用者无法获悉或需要通过复杂方式获悉控制装置的使用次数。
22、本申请中,通过并联设置,将逻辑芯片和第二计数电路的输出整合,在任何一个输出高电平的情况下,导通时间继电器,从而可以实现两个输出-一个执行的效果,简化控制逻辑,节约执行元件,且可以实现执行元件的复位;通过设置第三防反二极管,在逻辑芯片的输出端输出低电平,继电器的常开触点闭合,连接处为高电平时,避免连接处的高电平干扰逻辑芯片的输出端。
23、本申请中,通过设置第一继电器,使得电池所在支路在电源断路后自动导通,进行供电;通过设置极性相反连接的两个防反二极管,使得电源与电池的供电相互隔离,不受干扰;且通过设置防反二极管来维持第一继电器的断路状态,避免第一继电器反复通断。
技术特征:
1.一种手术机器人控制装置的智能监测系统,其特征在于,包括:
2.根据权利要求1所述的智能监测系统,其特征在于,还包括触发电路,所述触发电路与所述第一计数电路连接,用于在所述第一计数电路记录的闭合次数超出预设阈值后,对外发出第一触发信号。
3.根据权利要求2所述的智能监测系统,其特征在于,所述控制装置为脚踏开关,所述智能监测系统还包括关断电路,所述关断电路的输入端与所述触发电路、所述第二计数电路连接,输出端与所述脚踏开关连接;
4.根据权利要求3所述的智能监测系统,其特征在于,所述关断电路为延时电路,用于在接收到所述第一触发信号和/或第二触发信号,并延时预设时长后,将所述脚踏开关与电源的通路断开。
5.根据权利要求4所述的智能监测系统,其特征在于,所述第一计数电路包括依次连接的多个计数模块;
6.根据权利要求5所述的智能监测系统,其特征在于,所述触发电路包括至少一个逻辑芯片,所述逻辑芯片与对应位的计数模块的多个预设输出端连接,用于在该计数模块所述预设输出端均输出高电平时对外输出高电平。
7.根据权利要求3所述的智能监测系统,其特征在于,所述关断电路包括时间继电器,所述时间继电器的输入端与第二计数电路的输出端连接,且与所述触发电路的输出端通过第三防反二极管连接,所述时间继电器的常闭触点与所述脚踏开关连接。
8.根据权利要求7所述的智能监测系统,其特征在于,所述关断电路还包括延时按钮,所述延时按钮与所述时间继电器串联,用于在被按压时对所述关断电路进行一次通断循环。
9.根据权利要求1所述的智能监测系统,其特征在于,还包括电池电路,所述电池电路包括第一继电器、电池、第一防反二极管和第二防反二极管;所述第一继电器与电源形成回路,所述电池与所述第一继电器的常闭触点连接,且通过所述第一防反二极管、第二防反二极管与电源形成回路,用于在电源断开后进行供电;所述第一防反二极管和所述第二防反二极管极性反向连接。
10.根据权利要求5所述的智能监测系统,其特征在于,还包括清零按钮,所述清零按钮与所述第二计数电路的清零端口、所述计数模块的清零端口连接,用于在被按压后清零所述第二计数电路和所述计数模块。
技术总结
本申请提供了一种手术机器人控制装置的智能监测系统,其包括:控制装置,至少具有一组常开触点,用于输出所述控制装置的闭合信号;第一计数电路,与所述控制装置的常开触点连接,用于记录所述控制装置的闭合次数;第二计数电路,输入端与所述控制装置的常开触点连接,输出端与计算机串行接口连接,用于将记录的所述控制装置的闭合次数输出至外部计算机。本申请中,通过计数电路记录控制装置的闭合次数,从而可以在控制装置到达设计使用次数之前对控制装置进行更换,避免控制装置因超出设计使用次数而损坏,影响手术进度。
技术研发人员:张逸凌,刘星宇
受保护的技术使用者:北京长木谷医疗科技股份有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!