供眼科手术系统用来操作手机的控制台和眼科手术系统的制作方法
供眼科手术系统用来操作手机的控制台和眼科手术系统
1.本发明涉及一种供眼科手术系统用来操作手机的控制台,该手机可通过工作流体驱动,该手机特别适合于在用于治疗眼睛的眼科手术方法中使用。控制台包括第一工作阀,该第一工作阀用于根据第一工作阀的开关状态将工作流体施加到手机的第一工作室,其中第一工作阀包括用于将第一工作阀在打开开关状态与关闭开关状态之间进行切换的第一电动驱动单元。进一步,控制台包括第二工作阀,该第二工作阀用于根据第二工作阀的开关状态将工作流体施加到手机的第二工作室,其中第二工作阀包括用于将第二工作阀在打开开关状态与关闭开关状态之间进行切换的第二电动驱动单元。每个工作阀被配置为在打开延迟时间期间从关闭开关状态切换到打开开关状态以及在关闭延迟时间期间从打开开关状态切换到关闭开关状态。而且,控制台包括控制单元,该控制单元电耦合到第一电动驱动单元和第二电动驱动单元并且被设计为用相应的第一电开关信号和第二电开关信号致动第一电动驱动单元和第二电动驱动单元,使得相应的开关信号随时间相继地向相应的电动驱动单元施加打开开关状态的打开电势和关闭开关状态的关闭电势。结果,工作阀可以分别交替采用打开开关状态和关闭开关状态。最后,本发明还涉及一种具有至少一个手机的眼科手术系统,该至少一个手机可通过工作流体驱动并且特别适合于在用于治疗眼睛的眼科手术方法中使用。手机包括第一工作室和第二工作室以及工作活塞,工作活塞可移动地布置在第一工作室与第二工作室之间并且这些工作室的工作流体能够施加到该工作活塞。进一步,眼科手术系统包括用于将手机的工作室与工作流体耦合并且用于将工作流体施加到所述工作室的控制台、以及用于提供工作流体的工作流体源。
2.通用方法、控制台和眼科手术系统在现有技术中是众所周知的,因此在这方面原则上不需要单独的文件证据。它们尤其可以用于治疗眼睛、特别是人眼。然而,用途并不限于此。眼睛的治疗具体指具有眼睛样稠度的主体的治疗,主体是例如凝胶体、包括至少部分弹性或可流动的高粘度物质的组织体、眼睛样测试体、非活体眼睛(例如取自人体或动物体的眼睛)等等。举例来说,凝胶体或组织体可以是至少部分尺寸稳定的。而且,可以设置为手机例如能够用于活体眼睛的治疗。特别地,手机可以被适当地设计用于活体眼睛的治疗。手机优选地是眼科手术用手机。根据治疗的类型和应用和/或要求,手机被设计成具有适当的适配,例如适应于作为玻璃体切除术用切割工具(也称为玻璃体切除术用切割器)、作为用于超声乳化术等的手机来治疗眼睛的玻璃体液或视网膜。
3.对于它们的预期用途,手机耦合到控制台,控制台尤其为预期用途提供动力以及辅助物质和操作物质。玻璃体切除术用切割工具及其功能在例如下面的文件中进行了解释:paolo riccardo javez de olivera等人的“vitreoretinal instruments:vitrectomy-cutters,endoillumination and white-angel-viewing systems[玻璃体视网膜用器械:玻璃体切除术用切割器、眼内照明与白天使观察系统]”,“视网膜与玻璃体内部杂志”,2016年12月5日发表于视网膜与玻璃体内部杂志,2021。例如,该文件披露了一种玻璃体切除术用切割工具,其具有通过工作活塞机械驱动的切割刀片。玻璃体切除术用切割工具包括具有第一工作室和第二工作室的工作缸,工作活塞可移动地布置在第一工作室与第二工作室之间并且通过工作室能够被工作流体(通常由比如气体、特别是空气的流体
形成)冲击。为此目的,向玻璃体切除术用切割工具的工作室交替地施加工作流体,使得工作活塞随着根据工作流体施加的变化而前后移动,用于实现切割移动的目的。在本上下文中,us 8 728 108b2进一步披露了用于动态气动阀驱动的系统和方法。
[0004]
尽管现有技术已证明其价值,但仍需要改进。特别是大于大约10000次循环或切割/分钟(cpm)的尽可能高的循环速率或切割速率尤其是在后部玻璃体切除术的情况下是令人期望的。尽管使用玻璃体切除术用切割工具可以实现高循环速率,正如所解释的那样,这些玻璃体切除术用切割工具具有双气动驱动,也就是说有两个工作室作用在工作活塞上,因此基于双作用缸的原理,但这种玻璃体切除术用切割工具的驱动必须被设计成能够提供两个对应的交替压力信号。在本上下文中应该注意的是,两个工作室之间的压力差应尽可能高,这是因为玻璃体切除术用切割工具的工作活塞以及因此还有切割工具的刀片根据这个压力差移动。在这种情况下,另外期望保持工作流体中的压力、尤其是与工作流体源相关的压力尽可能低,因为这可能对玻璃体切除术用切割工具的驱动体积和振动有影响。玻璃体切除术用切割工具可实现的最大可能循环速率(也就是说玻璃体切除术用装置的完全打开和关闭)尤其受到与工作室相关的可实现压力差的限制。进一步,这个压力差尤其取决于工作流体的压力、工作阀的开关延迟时间以及与第一开关信号和第二开关信号相关的占空比。
[0005]
本发明基于提供一种供眼科手术系统用来操作手机的控制台的目的,该手机可通过工作流体驱动,由此可实现高工作速度。本发明的另一个目的是获得一种具有这种控制台的眼科手术系统。
[0006]
作为解决方案,本发明提出了如独立权利要求中所述的控制台和眼科手术系统。
[0007]
从从属权利要求中显现出有利的发展。
[0008]
关于通用控制台,本发明特别提出,关于工作阀的开关状态的相应变化,控制单元被设计成使得如果工作阀的打开延迟时间长于工作阀的关闭延迟时间,则分配给工作阀的开关信号在时间段差期间同时至少间歇地采用打开电势,或者使得如果工作阀的打开延迟时间短于工作阀的关闭延迟时间,则分配给工作阀的开关信号在时间段差期间同时至少间歇地采用关闭电势,其中时间段差的时间长度分别基于工作阀的打开延迟时间与工作阀的关闭延迟时间之间的差的而出现。
[0009]
关于所讨论类型的眼科手术系统,本发明特别提出根据本发明设计控制台。
[0010]
本发明尤其基于如下想法,即根据工作阀的开关延迟时间,与打开或关闭开关状态相关的第一和第二开关信号的时间重叠可以在相同循环速率的情况下实现工作阀的流动技术延长的打开开关状态,结果是这可以提供增大压力差和/或降低特别是工作流体源的一部分上的工作流体压力的选项。而且,这种构思还可以用于进一步提高循环速率,使得可以进一步改进手机的使用、特别是玻璃体切除术用切割工具的使用。这样做时,本发明能够提供这些优点而无需干扰手机或工作阀及其驱动单元。所需要的只是与控制单元相关的措施,通过这些措施可以以指定的方式实现开关信号的适当的时间重叠。在这种情况下,本发明特别涉及打开延迟时间长于关闭延迟时间的工作阀。时间段差可以实现的是,特别地,工作阀基本上不同时采用流动技术打开开关状态。因此,时间段差可以结合相应变化、特别是结合工作活塞的行程变化来指定开关信号的打开电势的时间重叠的上限。然而,本发明不限于此并且原则上也可以在相反的情况下使用,也就是说在打开延迟时间短于关闭延迟
时间时使用。在这种情况下,工作阀的开关信号至少在时间段差期间应该同时采用关闭电势。在本情况下,工作阀的开关状态特别指流动技术开关状态,涉及工作阀是否允许工作流体通过。两种情况下都可以实现的是每个工作阀在一个周期内或者在一个截止循环内尽可能长时间处于流动技术打开状态,同时还可以实现的是从流动技术的角度来看,工作阀基本上不同时处于打开开关状态。工作流体源可以至少部分地由控制台提供。然而,工作流体源还可以至少部分地设计为例如可以与控制台分开形成的外部工作流体源。
[0011]
打开延迟时间特别是指从对应的开关信号从关闭电势变化到打开电势的时间开始的时间段。这个时间段结束于工作阀由于开关信号的变化从流动技术的角度看达到打开开关状态的时间。相应地,适用于关闭延迟时间的是,这特别是指从开关信号从打开电势切换到关闭电势的时间开始并在从流动技术的角度来看对应分配的工作阀达到关闭开关状态的时间结束的时间段。在通用工作阀的情况下,打开延迟时间例如可以在大约1.5ms到大约7ms的范围内、优选地在大约2ms到大约5ms的范围内、特别优选地约为大约4ms。举例来说,这种工作阀的关闭延迟时间可以在大约0.5ms到大约3ms的范围内、优选地约为大约2ms。然而,这也可以不同,这取决于工作阀的结构。也可设想打开延迟时间短于关闭延迟时间的工作阀。总的来说,如果为了控制手机的目的而优选地在控制台中使用的工作阀基本上大致相同,则本发明是有利地可用的。然而,本发明不限于此并且如果使用不同的工作阀(尤其是关于开关延迟时间)也同样可以使用。本发明允许相应地考虑不同的开关延迟时间、以及确定适当的时间段差。特别是在个体基础上,可以具体地调整时间段差及其应用。
[0012]
工作阀优选地包括电动驱动单元。原则上,尽管电动驱动单元可以设置为与工作阀相关的单独单元并且可以相应地机械地耦合到工作阀,使得电动驱动单元能够结合采用相应的开关位置来致动工作阀,但电动驱动阀优选地被工作阀包括并且优选地与工作阀形成结构单元。
[0013]
电动驱动单元优选地是电磁体的形式,其例如是螺线管的样式,包括能够向其施加电流的电线圈,优选地可磁化的电枢以轴向可移动的方式布置在所述线圈内。电枢机械地连接到工作阀的阀体,结果是阀体可以通过电枢在阀体以密封方式靠在工作阀的阀座上以便提供工作阀的关闭开关状态的位置与阀体同阀座间隔开定位以便提供工作阀的打开开关状态的另一状态之间移动。电枢由于磁力而在相应位置之间移动,其中可选地考虑补充弹簧力。为此目的,电线圈由对应的开关信号致动。开关信号是电信号,该电信号会在电线圈中引起对应的电流,结果是根据需要使电枢移动。然而,本发明并不限于使用电磁体。也可以使用其他驱动单元,例如基于压电的驱动单元等。然而,驱动单元不限于此。驱动单元也可以设计成具有电容效应。在这种情况下,也可以考虑用于驱动具有电容效应的驱动单元的对应电流来代替电势。原则上,针对电势指定的相同考虑因素适用于这种情况。
[0014]
开关信号时间曲线优选地由对应的矩形信号形成。两个开关信号中的每个开关信号在其电气特性方面都与相应的驱动单元相适应。这特别地涉及打开电势和关闭电势,或涉及作为电压的对应电势差。如果工作阀及其相关联的驱动单元具有基本相同的形式,则两个开关信号的打开电势和关闭电势通常也基本上相同。举例来说,打开电势与关闭电势之间的电压可以是几伏,例如大约3v至大约60v、优选地为大约5v至大约24v。然而,如果需要,电压也可以选择为更大或更小。
[0015]
开关信号的电压优选地是脉动直流电压。例如,如果工作阀的打开延迟时间长于
关闭延迟时间,则本发明允许第一开关信号从关闭电势到打开电势的变化在时间上提前由两个开关延迟时间组成的时间段差,结果是当第二工作阀从流动技术的角度来看达到关闭开关状态时,第一工作阀从流动技术角度来看可以达到打开开关状态。由于时间段差,可以避免工作阀的流动技术打开开关状态的时间重叠。因此,本发明可以使流动技术开关状态彼此更接近,结果是可以延长工作阀的相应的流动技术打开开关状态。同时,这也允许增大压力差或使切割速度更快。
[0016]
结果,对于时间段差,例如两个开关信号的打开电势的时间重叠会自然出现。现在,控制单元被相应地配置,结果是控制单元基于开关延迟时间相应地提供开关信号。为此目的,可以设置为,使得将控制单元的开关延迟时间作为文件来获得。此文件可以基于经验上为工作阀确定的数据来创建。而且,自然也存在如下选项,即控制单元本身能够通过使用比如传感器等另外的补充装置至少部分地确定这些开关延迟时间。
[0017]
控制单元可以采用或提供功能,特别是关于工作阀的控制、特别是关于驱动单元的操作等的功能。控制单元本身可以作为单独的部件提供。然而,控制单元优选地是控制台的组成部分,特别优选地布置成集成到控制台中。原则上,控制单元可以至少部分地或完全地设计为电子硬件电路。而且,控制单元可以至少部分地或全部由通过合适的计算机程序控制的计算机单元形成,以便能够提供期望的功能。
[0018]
根据发展,提出了控制台被设计为在相应分配的工作阀的关闭开关状态下从相应工作室中排出工作流体。结果,对应的工作室可以卸下工作流体的负担,结果是可以帮助工作活塞的对应移动。例如,可以使用真空或负压源的负压来排放工作流体。然而,也可以设置为工作流体仅排出到周围环境中。以此方式,可以特别快速地实现工作流体的排出,因此还可以进一步帮助提供大的压力差。工作流体排放可以例如通过流量控制装置等来实现,例如借助于能够直接在手机本身处排放工作流体(尤其是如果工作流体是气体)来实现。
[0019]
优选地通过相应的工作阀排放工作流体。在流动技术关闭开关状态下,工作阀为此可以提供排放通道或仅提供排放口,通过该排放通道或排放口可以排放工作流体。为此,工作阀可以提供切换功能,该切换功能交替地将工作室连接到流动技术打开开关状态下的工作流体源和关闭开关状态下的排放口。以这种方式可以优选地实现的是,可以通过控制台提供排放工作流体的功能,使得不需要在手机的部分上设置有适当的装置,因此,可以改进手机的结构和/或操作,尤其是在预期使用眼睛治疗期间。这种配置特别适合于在手术环境中使用。
[0020]
而且,提出通过相应的第一或第二释放阀排放工作流体。在这种配置中,除了工作阀之外还设置有释放阀,并且释放阀优选地相对于工作阀以互补的方式致动。当工作阀处于流动技术关闭开关状态时,释放阀优选地处于流动技术打开开关状态。进一步,当工作阀处于流动技术打开开关状态时,释放阀处于流动技术关闭开关状态。释放阀可以通过相应的驱动单元液压地、气动地或电动地控制。释放阀优选地是可电控的并且特别地连接到控制单元,使得释放阀可以由控制单元利用相应的适当开关信号致动。
[0021]
根据发展,可以设置为控制单元被设计为基本上独立于开关信号的频率来确定时间段差的时间长度。这种配置允许考虑的是,相应的开关延迟可以至少部分地基本上独立于开关信号的频率或工作阀的致动。结果,即使在可变的开关信号频率或循环速率的情况下,也不需要调整时间段差。对于这种情况可以特别优选地设置,控制单元被编程有特别优
选地可以固定地设置的时间段差。此外,在这种情况下不需要提供包含工作阀开关延迟时间的文件。而是,例如通过输入单元处的输入,在控制单元中相应地指定时间段差就足够了,该输入单元可通信地耦合到控制单元并且例如用户可以在该输入单元上进行适当的输入等。因此,可以特别容易地实现本发明。相比之下,如果开关延迟是与频率相关的,那么可以相应地考虑这一点以便确定时间段差。时间段差于是可以相应地与频率相关。
[0022]
根据另外的发展,提出了为了确定相应工作阀的打开延迟时间或关闭延迟时间,控制单元被设计为通过相应工作阀处的压力传感器检测工作流体的手机侧压力。作为这种发展的结果,可以至少部分地监视工作阀的打开延迟时间或关闭延迟时间,并且如果需要,根据所确定的开关延迟时间相应地调整时间段差的时间长度。举例来说,控制单元能够自己确定开关延迟。结果,可以相应地响应工作阀老化的迹象或者响应工作阀的开关延迟时间的可能的频率相关性。适当的措施优选地在眼科手术系统的预期操作之外实现。然而,也可以设置为在预期操作期间获取和评估适当的数据,使得控制单元即使在预期操作期间也能够根据需要调整对应的开关信号。这允许获得相应单独操作状态的高精度设置。因此也可以进一步增大压力差。
[0023]
而且,提出了控制单元被设计为通过位置传感器检测可移动地布置在第一工作室与第二工作室之间的工作活塞的至少一个终止位置,并且此外基于至少一个检测到的终止位置调节开关信号。位置传感器优选地布置在手机中并且可以优选地无接触地检测工作活塞的相应终止位置。特别优选地检测工作活塞的两个相反的终止位置。可以通过光、电场和/或磁场等实现检测。这种发展允许可靠地检测到到达终止位置,尤其是在高循环速率的情况下,并且如果没有达到所需的终止位置,则可选地调整、例如增大尤其是与工作流体源相关的工作流体的压力。这也允许进一步增大压力差,结果是,结合打开电势的至少间歇时间重叠,可以进一步改进手机的操作、特别是玻璃体切除术用切割工具的操作。举例来说,位置传感器可以通过光、磁场、电场等等来检测活塞的位置。位置传感器具有适当调整的实施例并且优选地连接到控制单元,使得控制单元能够评估由位置传感器提供的位置信号。
[0024]
根据发展,提出了手机是玻璃体切除术用切割工具并且控制单元被设计为基于循环速率来设置工作流体的压力。这可以实现的是,每当对应的循环速率也需要这样时,只需选择大的工作压力即可。由于能够降低工作流体的压力的选项,在预期操作期间也可以相应地降低噪声和振动,特别是控制台和/或玻璃体切除术用切割工具或其驱动单元的噪声和振动。结果,可以进一步改进玻璃体切除术用切割工具的预期操作。
[0025]
根据发展,提出了手机是玻璃体切除术用切割工具并且控制单元被设计为此外至少基于指定的或可指定的循环速率的周期持续时间、最大循环速率的周期持续时间、以及工作阀的打开延迟时间或关闭延迟时间来确定该指定的或可指定的循环速率的开关信号的占空比。结果,总体上可以在预期使用期间获得改进的方法实现方式。优选地,占空比(dc)可以如下确定:
[0026][0027]
在这里,t
max
表示分配给最大循环速率的周期持续时间,t
on
表示打开延迟时间,t
off
表示关闭延迟时间,以及t表示所需的指定或可指定的周期持续时间。优选地,如果两个工作阀具有基本上相同的实施例,则这个公式是特别有利地适用的。
[0028]
针对根据本发明的方法指出的优点和效果也同样适用于眼科手术系统和眼科手术系统的控制台,反之亦然。特别地,方法特征因此也可以表述为装置特征,反之亦然。
[0029]
本发明的进一步特征从权利要求、附图和对附图的描述中变得清楚。以上描述中提及的特征和特征组合、以及在以下对附图的描述中提及的和/或仅在附图中示出的特征和特征组合不仅可以以相应规定的组合来使用,而且还可以以其他组合来使用,并不背离本发明的范围。因此,在附图中未明确示出和解释、但通过所解释的实施例的特征的单独的组合而出现并且可以通过其创造的本发明的实施例也应被认为是要被包括的和披露的。此外,披露内容应被认为扩展到配置和特征组合,尤其是通过以上陈述的配置,这些配置和特征组合超出或脱离权利要求的从属引用中陈述的特征组合。
[0030]
参考以下附图来解释本发明的另外的优点和特征,附图中:
[0031]
图1示出了具有控制台的眼科手术系统的示例性实施例的示意图,玻璃体切除术用切割工具连接到该控制台,
[0032]
图2示出了根据图1的眼科手术系统的控制台的一部分的示意性框图,该部分包括压缩空气单元和与压缩空气单元连接的阀单元,
[0033]
图3示出了根据图2的阀单元的工作阀的开关信号和开关状态的示意性信号表示,
[0034]
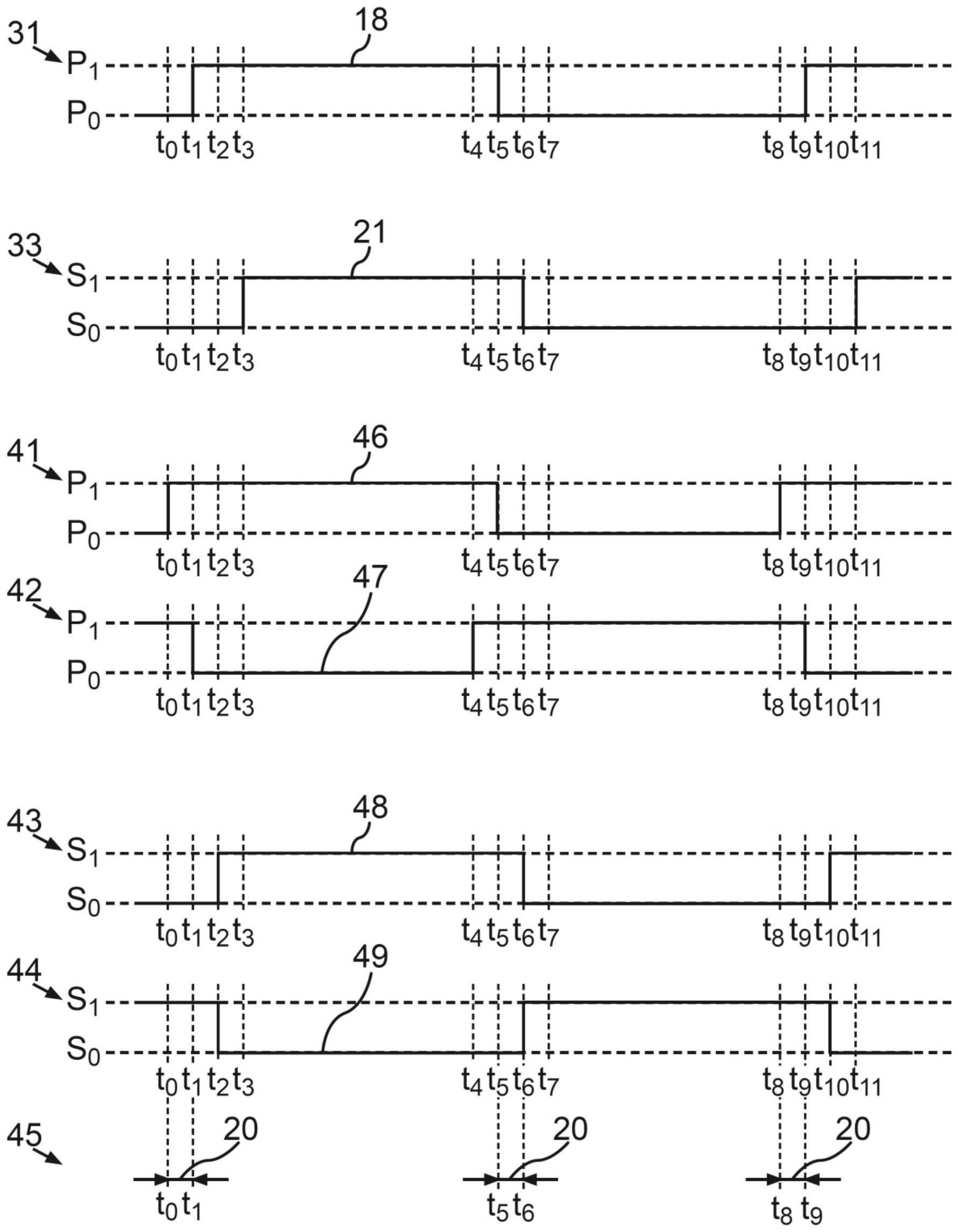
图4示出了类似于图3的示意性信号表示,其中开关信号在时间上部分重叠了时间段差,
[0035]
图5示出了对于第一气压,根据图2的开关信号的占空比的示意图表示,这取决于玻璃体切除术用切割工具的循环速率,以及
[0036]
图6示出了第二气压的与图5中相似的示意图表示。
[0037]
在附图中,相同的附图标记表示相同的特征和功能。
[0038]
图1示出了具有控制台1的眼科手术系统100的示意图,作为手机的玻璃体切除术用切割工具2连接到该控制台。眼科手术系统100是用于治疗眼睛(未展示)的医疗系统。眼科手术系统100的控制台1用于在预期操作期间、特别是在眼睛治疗期间连接和操作玻璃体切除术用切割工具2。玻璃体切除术用切割工具2包括切割单元15,切割单元通过玻璃体切除术用切割工具2的驱动杆14连接到玻璃体切除术用切割工具2的驱动活塞12。在预期操作期间,驱动活塞12来回移动(如下所解释)使得切割单元15也通过驱动杆14相应地被致动,以便能够执行所需的切割。玻璃体切除术用切割工具2的功能是本领域技术人员所熟知的,所以在这里省略了这一方面的详细解释。
[0039]
驱动活塞12可移动地安装在玻璃体切除术用切割工具2的工作缸13内。驱动活塞12将工作缸13未标示的内部划分为第一工作室10和第二工作室11。在预期操作期间,作为工作流体的压缩空气一般交替地施加到工作室10、11,结果是驱动活塞12在工作缸13内来回移动并且因此能够通过驱动杆14驱动切割单元15。
[0040]
控制台1包括阀单元3,从流动技术的角度来看,该阀单元与压缩空气单元9耦合以提供压缩空气作为工作流体。在本配置中,设置为控制台1包括压缩空气单元9。然而,这也可以在替代配置中变化,并且压缩空气单元9可以至少部分地与控制台1分开形成。
[0041]
控制台1、特别是其阀单元3进一步通过流体线路23、24连接到玻璃体切除术用切割工具2、特别是连接到那里的工作室10、11。因此,当连接玻璃体切除术用切割工具2时,阀单元3能够对应地交替地向工作室10、11施加压缩空气。流体线路23、24可以至少部分地实
施为柔性线路。而且,流体线路23、24还可以包括连接元件,因此这些流体线路可以至少部分地可拆卸地布置。流体线路23、24可以形成为一件或多件。
[0042]
阀单元3进一步连接到控制台1的控制单元8,该控制单元是电子控制单元的形式并且向阀单元3提供适当的电开关信号,这将在下文中更详细地解释,使得阀单元3按预期通过流体线路23、24将压缩空气施加到工作室10、11。这些图没有展示可能存在的另外的线路,这些另外的线路例如可以是流体线路和/或电线的形式,例如以便能够从控制台1向玻璃体切除术用切割工具2供应灌洗流体和/或以便能够将抽吸流体从玻璃体切除术用切割工具2排放到控制台1。而且,还可以设置另外的线路,例如用于传感器系统的电线、玻璃体切除术用切割工具2的其他控制功能等的电线。
[0043]
在示意框图中,图2现在示出了控制台1部分,该控制台部分包括压缩空气单元9和阀单元3。从图2中明显看出,阀单元3包括第一工作阀4,该第一工作阀用于根据第一工作阀4的开关状态向玻璃体切除术用切割工具2的第一工作室10施加压缩空气。第一工作阀4包括作为电动驱动单元的第一电磁体6,用于使第一工作阀4在打开开关状态s1与关闭开关状态s0之间切换(图3)。阀单元3进一步包括第二工作阀5,该第二工作阀用于根据第二工作阀5的开关状态向玻璃体切除术用切割工具2的第二工作室11施加压缩空气。第二工作阀5包括作为电动驱动单元的第二电磁体7,用于使第二工作阀5在打开开关状态s1与关闭开关状态s0之间切换(图3)。如下面将基于图3解释的,每个工作阀4、5在打开延迟时间16期间从关闭开关状态(s0)切换到打开开关状态(s1),以及在关闭延迟时间17期间从打开开关状态(s1)切换到关闭开关状态(s0)。
[0044]
控制单元8电耦合到电磁体6、7并且被设计为用相应的第一电开关信号18和第二电开关信号19致动电磁体6、7,使得相应的开关信号18、19随时间将打开开关状态s1的打开电势p1和关闭开关状态s0的关闭电势p0相继地施加到相应的电磁体6、7,使得第一工作阀4和第二工作阀5分别可以交替采用相应的开关状态。这在根据图3的示意性信号表示中的图解31至34中显而易见。由此显而易见,两个电磁体6、7的开关信号18、19分别交替采用打开电势p1和关闭电势p0。开关信号18、19的电势分别在时间t1、t5改变。在图3中,这在两个图解31和32中示出。图解31表示电磁体6的开关信号18的时间段,而图解32表示电磁体7的开关信号19的对应时间段。
[0045]
电磁体6被致动,使得电磁体在时间t1从关闭电势p0切换到打开电势p1。此打开电势p1一保持直到时间t5。电磁体6在时间t5再次被致动,使得电磁体切换到关闭电势p0。电磁体6保持在此关闭电势p0直到电磁体在时间t9再次被致动并切换到打开电势p1。开关信号的这条曲线在图解31中用附图标记18表示。
[0046]
电磁体7以与其类似的方式基本上同时被致动。电磁体7处于打开电势p1一直到时间t1。电磁体7在时间t1被致动并切换到关闭电势p0。电磁体7保持在此关闭电势p0一直到时间t5,此时电磁体再次被致动并切换到打开电势p1。此打开电势p1一直到时间t9都保持不变。电磁体7在时间t9再次被致动并切换到关闭电势p0。开关信号的这条曲线在图解32中用附图标记19表示。
[0047]
图3的图解33和图解34在相同的时间标度下使用相应的曲线图21、22示出了在时间上分配的工作阀4、5的流动技术开关状态s0和s1。根据曲线图21、22的开关状态涉及流动技术开关状态,其中值s1对应于相应工作阀4、5的流动技术打开开关状态,也就是说压缩空
气流已启用。相比之下,值s0被分配给流动技术关闭开关状态,在这种情况下,工作阀阻止从压缩空气单元9到相应工作室10、11的流动。因此,曲线图21分配给工作阀4,而曲线图22分配给工作阀5。
[0048]
如果电磁体6根据开关信号18的曲线被致动,则工作阀4出现以下曲线,由图解33中的曲线图21表示:在电磁体6处的电势在时间t1从关闭电势p0切换到打开电势p1。然而,工作阀4不会立即跟随此切换,而是会有打开延迟时间16,如图解38所示。这意味着工作阀4仅在时间t3从关闭开关状态s0切换到打开开关状态s1。工作阀4保持在此开关状态。在电磁体6处的电势在时间t5从打开电势p1变为关闭电势p0。然而,工作阀4不能无延迟地跟随这种致动,而只是在时间t6将其开关状态从s1改变到s0。因此,存在关闭延迟时间,如图解38中的附图标记17所示。应注意的是,在本实施例中关闭延迟时间17短于打开延迟时间16。工作阀4最初保持在此开关状态s0。电磁体6在时间t9被致动,使得关闭电势p0变为打开电势p1。然后工作阀4在时间t
11
切换其开关状态s0,同样有打开延迟16,以便切换到开关状态s1。
[0049]
针对工作阀5类似地实现这条曲线。如果根据开关信号19致动电磁体7,则工作阀5出现以下开关曲线,由图解34中的曲线图22表示:电磁体7的开关信号在时间t1从打开电势p1变为关闭电势p0。工作阀5从开关状态s1切换到开关状态s0,但不是同时在时间t1而只是延迟到时间t2。因此,存在关闭延迟时间17(见图解39)。工作阀5最初保持在此开关状态s0。电磁体7的开关状态在时间t5从关闭电势p0变为打开电势p1。工作阀5不是无延迟地跟随,而只是在时间t7将其开关状态从s0切换到s1。因此,存在打开延迟时间16(见图解39)。工作阀5最初保持在此开关状态s1。电磁体7在时间t9被致动,使得打开电势p1变为关闭电势p0。然后工作阀5在t
10
切换其开关状态s1,有关闭延迟时间17,以便切换回开关状态s0。
[0050]
在本配置中,进一步设置了工作阀4、5允许在相应的关闭开关状态下从相应的工作室10、11排放压缩空气。然而,这也可以在替代配置中以不同方式构造。举例来说,可以设置单独的释放阀用于从工作室10、11排放压缩空气,以便能够从工作室10、11排放压缩空气。
[0051]
从图3中的图解40显而易见,存在由于工作阀4、5的开关延迟时间而出现的时间段,并且在这些时间段期间两个工作阀4、5同时处于关闭开关状态。在本情况下,这种情形存在于t2与t3之间的时间段内、在t6与t7之间的时间段内、以及在从t
10
到t
11
的时间段内。在本配置中,这是因为打开延迟时间16(也就是说例如t1与t3之间的时间段)长于关闭延迟时间17(也就是说,例如t5与t6之间的时间段)而出现。在本情况下,设置了工作阀4、5具有基本上相同的实施例。发现两个工作阀4、5同时处于关闭状态的时间段是不利的,尤其是在玻璃体切除术用切割工具2的循环速率高的情况下,如上面已经解释的。
[0052]
本发明在此通过缩短两个工作阀4、5同时处于关闭开关状态的上述时间段的时间长度解决了眼科手术系统100的功能改进,特别是与振动、噪声、最大可达到的循环速率等相关的改进。本发明通过如下方式实现这一点,即控制单元8被设计为在(与本情况一样)相应工作阀4、5的打开延迟时间16长于相应的另一个工作阀4、5的关闭延迟时间17时在时间段差20期间实现分配给相应工作阀4、5的开关信号18、19从关闭电势p0切换到打开电势p1。这在下面基于图4进行了示意性展示,该图示出了与图3中相似的示意性信号表示。为了简化与根据图3的表示相关的时间分配,图4同样包括图解31和图解33作为参考。时间段差20的时间长度基于相应工作阀4、5的打开延迟时间16与相应另一个工作阀4、5的关闭延迟时
间17之间的时间段差而产生。这从图3中的图解40中显而易见。相应地,时间段差的时间长度例如从时间t3减去t2、t7减去t6以此类推而出现。
[0053]
在根据图4的图解41中,该图解具有与图解31相同的时间轴,曲线图46表示第一电磁体6的开关信号。与根据图解31中的曲线图18的第一开关信号相比,根据曲线图46的开关信号在延长了时间段差20的时间内采取电势p1。由于第一开关信号的周期持续时间保持不变,因此第一开关信号采用电势p0的时间段相应地缩短了时间段差20。也就是说,根据曲线图46的第一开关信号在时间t0已经从电势p0切换到电势p1,并保持此电势一直到时间t5。此时的切换对应于曲线图18的切换。在时间t5,第一开关信号再次从电势p1切换到电势p0,并保持后一个电势一直到时间t8,此时又从电势p0变到电势p1。随着时间的推移,这会相应地继续。
[0054]
电磁体7的相关联的第二开关信号会出现对应的情况,这基于图4的图解42中的曲线图47来表示,时间轴与图解41相同。根据曲线图47,第二开关信号在时间t1从电势p1切换到电势p0并保持此电势一直到时间t4。在时间t4,第二开关信号从电势p0切换到电势p1并保持此电势一直到时间t9。在时间t9从电势p1变到电势p0。这同样会相应地随着时间继续。
[0055]
图解43和图解44通过相应的曲线图48、49展示了工作阀4、5的关联开关状态。图解43和图解44具有与分别分配的图解41和图解42相同的时间轴。考虑到工作阀4、5的开关延迟时间16、17,流动技术开关状态如下出现:如从曲线图48显而易见的,工作阀4的开关状态在时间t2从关闭开关状态切换到打开开关状态并保持在这种开关状态一直到时间t6。在时间t6,开关状态又切换,精确地说是从打开开关状态切换到关闭开关状态,并且此开关状态一直保持到时间t
10
。在时间t
10
,开关状态再次从关闭开关状态变为打开开关状态。根据曲线图46,基于第一开关信号,这相应地随时间继续。
[0056]
如从曲线图49显而易见的,工作阀5的开关状态在时间t2从打开开关状态切换到关闭开关状态并保持在这种开关状态一直到时间t6。在时间t6,开关状态又切换,精确地说是从关闭开关状态切换到打开开关状态,并且此开关状态一直保持到时间t
10
。在时间t
10
,开关状态再次从打开开关状态变为关闭开关状态。根据曲线图47,基于第二开关信号,这相应地随时间继续。
[0057]
如基于图4中的图解45显而易见的,根据曲线图46和曲线图47,两个开关信号都出现了两个开关信号同时具有电势p1的时间段差20,例如以时间t0和t1为界的时间段差20、以时间t5和t6为界的时间段差20、以及以时间t
10
和t
11
为界的时间段差20。这同样会相应地随着时间继续。基于曲线图48和曲线图49从图解43和图解44出现的是,如果完全利用时间段差20,则工作阀4、5的流动技术开关状态基本上同时切换,精确地说在时间t2、t6和t
10
切换。因此可以很大程度上避免基于图3中的图解33和图34出现的开关状态,其中两个工作阀4、5同时处于关闭开关状态,精确地说例如在以时间t2和t3为界或以时间t6和t7为界的时间段内同时处于关闭开关状态。
[0058]
不需要完全利用时间段差20,使得可以根据需要缩短两个工作阀4、5同时处于关闭开关状态的时间段。原则上,存在如下选项,即通过充分利用时间段差20使两个工作阀4、5同时处于关闭开关状态的时间段几乎变为零。由此显而易见,使用本发明通过利用时间段差20可以显着延长工作阀4、5的打开开关状态。结果,也可以在预期操作期间增大玻璃体切除术用切割工具2的工作室10、11之间的压力差。这使得能够达到更高的最大可达到的循环
速率和/或允许降低压缩空气单元9的压力,以便能够以这种方式降低例如噪声和振动。总的来说,因此可以改进眼科手术系统100的预期操作。
[0059]
如果打开延迟时间16短于关闭延迟时间17,则控制单元8可以被设计为将切换延迟至少时间段差20。这也可以实现可靠的功能。然而,这并未在图中展示。
[0060]
进一步,从图2显而易见的是压缩空气单元9的示意性结构。压缩空气单元9包括与外部压缩空气源(未更详细地描绘)的压缩空气连接件26。流量传感器27连接到压缩空气连接件26,该流量传感器能够检测压缩空气的流量并且将对应的传感器信号供应给控制单元8。进一步,源压力控制器28连接到流量传感器27,在本配置中,源压力控制器将外部压缩空气源的压力降低到控制台1或眼科手术系统100的最大工作压力,并将压缩空气供应到两个罐29。进一步,比例阀30连接到罐29,通过比例阀可以将来自罐29的压缩空气供应到阀单元3。即使在本情况下描绘了两个罐29,但本发明不限于此。原则上,也可以仅设置一个罐29。比例阀30同样连接到控制单元8,使得可以为眼科手术系统100的操作设置压缩空气的所需工作压力或工作压力。
[0061]
图5和图6示出了开关信号18、19的占空比作为循环速率的函数的示例。纵坐标分配给以%表示的相对占空比,而横坐标分配给循环速率,单位为循环次数/分钟(cpm)。在图5中,压缩空气的工作压力在本配置中为大约1.5巴。曲线图35表示最大占空比,对此,玻璃体切除术用切割工具2已完全打开。曲线图36表示玻璃体切除术用切割工具2的最小占空比,在这种情况下玻璃体切除术用切割工具2完全关闭。因此,为曲线图35和曲线图36之间的占空比提供了完整的切割循环。曲线图37表示曲线图35和曲线图36的差异。如从图5中显而易见的,某个循环速率的可选占空比范围随着循环速率的增加而减小。这个示例性实施例的最大可能循环速率已经达到大约11500cpm的循环速率。这里不再可能改变占空比。
[0062]
图6示出了与图5对应的表示,然而在这种情况下工作压力为大约1.8巴。显而易见,最大可能循环速率甚至尚未达到12000cpm。因此,即使在12000cpm的循环速率,仍然可以在上述限制内调节占空比,尽管在本情况下可调节范围相对较小,在12000cpm时仅为大约3%至4%。由此显而易见,通过增大工作压力也可以实现最大可达到的循环速率的提高。如上所解释的,通过本发明的附加应用,这可以得到进一步改进,因为通过更好地利用工作阀4、5的切换特性可以进一步提高压力差。
[0063]
示例性实施例仅用于解释本发明而不旨在限制本发明。
[0064]
附图标记清单
[0065]1ꢀꢀꢀꢀꢀꢀꢀ
控制台
[0066]2ꢀꢀꢀꢀꢀꢀꢀ
玻璃体切除术用切割工具
[0067]3ꢀꢀꢀꢀꢀꢀꢀꢀ
阀单元
[0068]4ꢀꢀꢀꢀꢀꢀꢀꢀ
工作阀
[0069]5ꢀꢀꢀꢀꢀꢀꢀꢀ
工作阀
[0070]6ꢀꢀꢀꢀꢀꢀꢀꢀ
电磁体
[0071]7ꢀꢀꢀꢀꢀꢀꢀꢀ
电磁体
[0072]8ꢀꢀꢀꢀꢀꢀꢀꢀ
控制单元
[0073]9ꢀꢀꢀꢀꢀꢀꢀꢀ
压缩空气单元
[0074]
10
ꢀꢀꢀꢀꢀꢀꢀ
工作室
[0075]
11
ꢀꢀꢀꢀꢀꢀꢀ
工作室
[0076]
12
ꢀꢀꢀꢀꢀꢀꢀ
驱动活塞
[0077]
13
ꢀꢀꢀꢀꢀꢀꢀ
工作缸
[0078]
14
ꢀꢀꢀꢀꢀꢀꢀ
驱动杆
[0079]
15
ꢀꢀꢀꢀꢀꢀꢀ
切割单元
[0080]
16
ꢀꢀꢀꢀꢀꢀꢀ
打开延迟时间
[0081]
17
ꢀꢀꢀꢀꢀꢀꢀ
关闭延迟时间
[0082]
18
ꢀꢀꢀꢀꢀꢀꢀ
电开关信号
[0083]
19
ꢀꢀꢀꢀꢀꢀꢀ
电开关信号
[0084]
20
ꢀꢀꢀꢀꢀꢀꢀ
时间段差
[0085]
21
ꢀꢀꢀꢀꢀꢀꢀ
开关状态
[0086]
22
ꢀꢀꢀꢀꢀꢀꢀ
开关状态
[0087]
23
ꢀꢀꢀꢀꢀꢀꢀ
流体线路
[0088]
24
ꢀꢀꢀꢀꢀꢀꢀ
流体线路
[0089]
26
ꢀꢀꢀꢀꢀꢀꢀ
压缩空气连接件
[0090]
27
ꢀꢀꢀꢀꢀꢀꢀ
流量传感器
[0091]
28
ꢀꢀꢀꢀꢀꢀꢀ
源压力控制器
[0092]
29
ꢀꢀꢀꢀꢀꢀꢀ
压缩空气罐
[0093]
30
ꢀꢀꢀꢀꢀꢀꢀ
比例阀
[0094]
31
ꢀꢀꢀꢀꢀꢀꢀ
图解
[0095]
32
ꢀꢀꢀꢀꢀꢀꢀ
图解
[0096]
33
ꢀꢀꢀꢀꢀꢀꢀ
图解
[0097]
34
ꢀꢀꢀꢀꢀꢀꢀ
图解
[0098]
35
ꢀꢀꢀꢀꢀꢀꢀ
曲线图
[0099]
36
ꢀꢀꢀꢀꢀꢀꢀ
曲线图
[0100]
37
ꢀꢀꢀꢀꢀꢀꢀ
曲线图
[0101]
38
ꢀꢀꢀꢀꢀꢀꢀ
图解
[0102]
39
ꢀꢀꢀꢀꢀꢀꢀ
图解
[0103]
40
ꢀꢀꢀꢀꢀꢀꢀ
图解
[0104]
41
ꢀꢀꢀꢀꢀꢀꢀ
图解
[0105]
42
ꢀꢀꢀꢀꢀꢀꢀ
图解
[0106]
43
ꢀꢀꢀꢀꢀꢀꢀ
图解
[0107]
44
ꢀꢀꢀꢀꢀꢀꢀ
图解
[0108]
45
ꢀꢀꢀꢀꢀꢀꢀ
图解
[0109]
46
ꢀꢀꢀꢀꢀꢀꢀ
曲线图
[0110]
47
ꢀꢀꢀꢀꢀꢀꢀ
曲线图
[0111]
48
ꢀꢀꢀꢀꢀꢀꢀ
曲线图
[0112]
49
ꢀꢀꢀꢀꢀꢀꢀ
曲线图
[0113]
p1
ꢀꢀꢀꢀꢀꢀꢀ
打开电势
[0114]
p0
ꢀꢀꢀꢀꢀꢀꢀ
关闭电势
[0115]
s1
ꢀꢀꢀꢀꢀꢀꢀ
气动打开状态
[0116]
s0
ꢀꢀꢀꢀꢀꢀꢀ
气动关闭状态
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1