并排式渐进结构自然腔道手术机器人的制作方法
本发明涉及医疗器械,具体而言,涉及一种并排式渐进结构自然腔道手术机器人。
背景技术:
1、随着自然腔道手术的日益普及,对与这类手术相关医疗器械的要求也越来越高。自然腔道手术机器人系统,利用人体自然存在的与体外相通的管道,如胃、阴道、尿道、结直肠、食管等,置入手术器械,通过人为输送内窥镜进入人体,其既可以解决内窥镜进入人体时对自然腔道内壁产生的损害,又可以利用机械系统的精准性、稳定性来提高手术质量。
2、参考公布号为cn 111568552 a、cn 114668432 a以及cn 114714370 a的发明专利,现有技术的自然腔道手术机器人中柔性臂存在运动过程不稳定、不可靠,灵活性差,不能精准地调整内窥镜的姿态。
技术实现思路
1、本发明就是为了解决现有技术的自然腔道手术机器人中柔性臂存在运动过程不稳定、不可靠,灵活性差,不能精准地调整内窥镜的姿态的技术问题,提供了一种并排式渐进结构自然腔道手术机器人。
2、本发明采用特殊的并排式渐进结构,一组由若干碗形链节组成,用三根钢丝来控制其行进路线和空间位置,主要用来调整内窥镜的镜头姿态;另一组由若干具有球面端部的圆柱体形链节组成,用一根钢丝来控制其空间位置,主要用来固定蛇骨走过的路径。
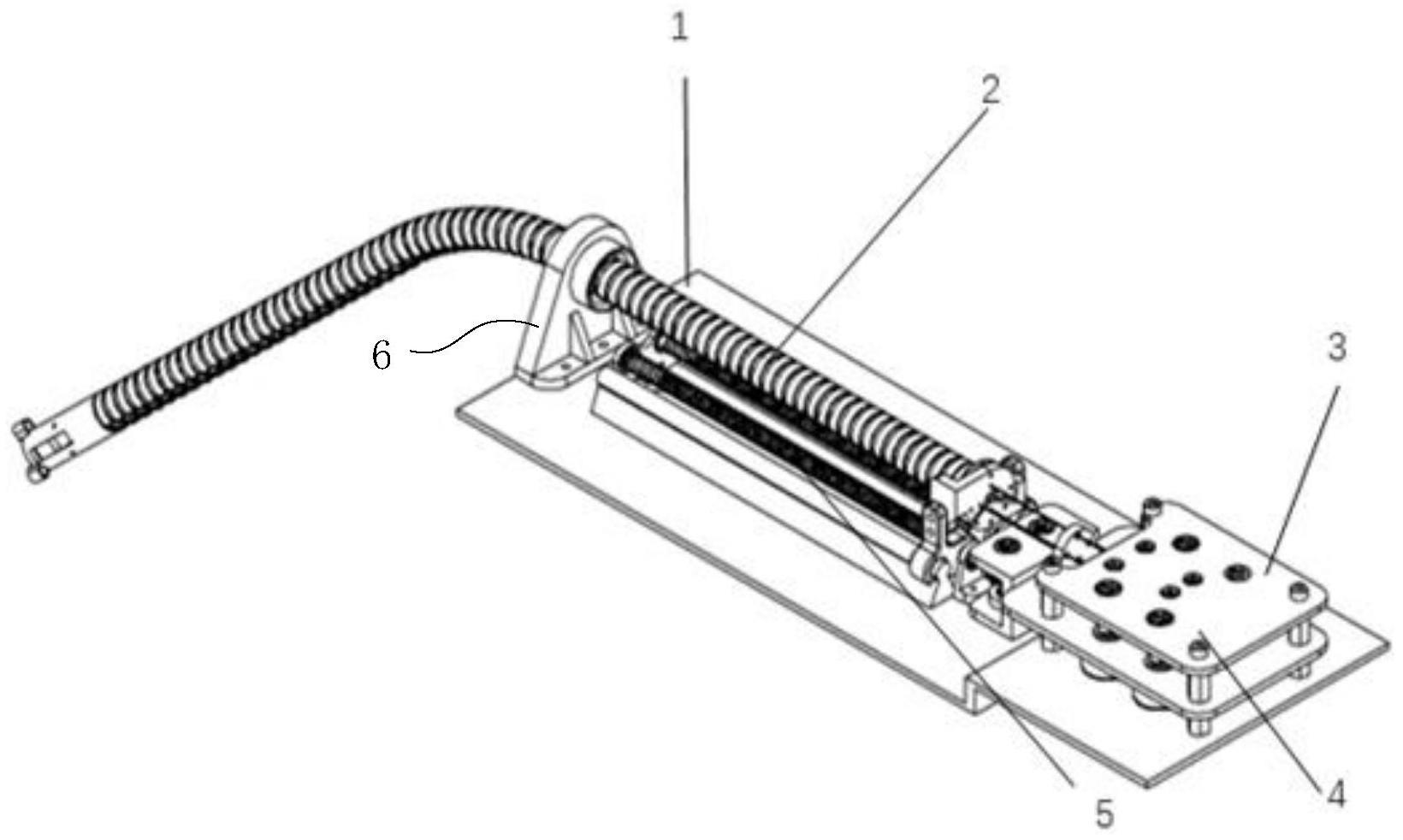
3、本发明提供一种并排式渐进结构自然腔道手术机器人,包括基座、柔性躯干、动力装置、丝杆传动装置、链节推动装置、躯干支撑架、内窥镜安装筒和内窥镜;
4、柔性躯干包括第一钢丝、第二钢丝、第三钢丝、第四钢丝、若干个碗形链节、若干个具有球面端部的圆柱体形链节,碗形链节设有底部圆形开口和侧面缺口,侧面缺口与底部圆形开口连通,碗形链节设有三个沿圆周方向均布的丝孔;具有球面端部的圆柱体形链节设有圆柱本体、定位凸起部,圆柱本体设有中心丝孔,圆柱本体的前端为球面端部,圆柱本体的后端设有球面形凹槽;若干个碗形链节依次叠放在一起,第一钢丝、第二钢丝、第三钢丝分别穿过每个碗形链节上的三个丝孔,相邻两个碗形链节的侧面缺口对齐,每一个碗形链节中放置一个具有球面端部的圆柱体形链节,圆柱体形链节的定位凸起部位于碗形链节的侧面缺口中,第四钢丝依次穿过若干个具有球面端部的圆柱体形链节的中心丝孔,若干个具有球面端部的圆柱体形链节被串联起来,后面具有球面端部的圆柱体形链节的球面端部嵌入前面具有球面端部的圆柱体形链节的球面形凹槽中;第四钢丝的前端固定连接第四金属丝结,第四金属丝结位于柔性躯干中最前面的具有球面端部的圆柱体形链节的中心丝孔处;
5、动力装置与基座连接,柔性躯干的第一钢丝、第二钢丝、第三钢丝、第四钢丝分别与动力装置连接;
6、丝杆传动装置包括第一丝杆、第二丝杆、第一导轨、第二导轨、固定块底座一、固定块底座二、从动齿轮一、从动齿轮二、主动齿轮二、传动机构连接座、传动轴一、传动轴二、驱动轴一、驱动轴二、前轴承座、后轴承座,前轴承座、后轴承座分别固定连接在基座上,第一导轨、第二导轨分别固定连接在基座上,第一导轨、第二导轨并排布置,第一丝杆的前端与前轴承座连接,第一丝杆的后端与后轴承座连接,第二丝杆的前端与前轴承座连接,第二丝杆的后端与后轴承座连接;固定块底座一套在第一丝杆,固定块底座二套在第二丝杆上,固定块底座一的第一内螺纹孔与第一丝杆的外螺纹连接配合,固定块底座二的第二内螺纹孔与第二丝杆的外螺纹连接配合;固定块底座一套在第一导轨上进行滑动连接,固定块底座二套在第二导轨上进行滑动连接;传动轴一与第一丝杆的后端连接,传动轴二与第二丝杆的后端连接,从动齿轮二与传动轴二固定连接,从动齿轮一与传动轴一固定连接;驱动轴一的两端通过分别通过轴承与传动机构连接座转动连接,驱动轴二的两端分别通过轴承与传动机构连接座转动连接;主动齿轮二与驱动轴二固定连接,主动齿轮一与驱动轴一固定连接;主动齿轮一与从动齿轮一啮合,主动齿轮二与从动齿轮二啮合;固定块底座二的上部设有两个连接孔,固定块底座一的上部设有两个连接孔;
7、链节推动装置包括碗形链节推动块和中间链节推动块,碗形链节推动块设有连接板、推动板,连接板设有两个连接孔,推动板的中部设有推动圆柱体容纳缺口和三个钢丝过孔,三个钢丝过孔位于推动圆柱体容纳缺口的周围;中间链节推动块设有连接板、推动板、推动圆柱体,中间链节推动块的连接板设有两个连接孔,推动圆柱体设有中心钢丝孔;碗形链节推动块的推动板位于中间链节推动块的推动板的上方,推动圆柱体位于碗形链节推动块的推动圆柱体容纳缺口中;
8、丝杆传动装置中固定块底座二上部的两个连接孔通过两个螺钉与碗形链节推动块中连接板的两个连接孔连接,固定块底座一上部的两个连接孔通过两个螺钉与中间链节推动块中连接板上的两个连接孔连接;
9、第一钢丝、第二钢丝、第三钢丝分别穿过碗形链节推动块中的三个钢丝过孔,第四钢丝穿过中间链节推动块中的中心钢丝孔;
10、内窥镜安装筒的后端设有球面凹槽和沿圆周方向均布的三个丝孔,内窥镜与内窥镜安装筒连接;
11、柔性躯干中最前面的碗形链节嵌入内窥镜安装筒后端的球面凹槽中,第一钢丝、第二钢丝、第三钢丝的前端先穿过柔性躯干中最前面的碗形链节的三个丝孔后再穿过内窥镜安装筒后端的三个丝孔,第一钢丝、第二钢丝、第三钢丝的前端分别固定连接有金属丝结;
12、躯干支撑架与基座固定连接躯干支撑架,躯干支撑架设有圆形通孔,柔性躯干的中部穿过躯干支撑架的圆形通孔。
13、优选地,内窥镜可拆卸式地与内窥镜安装筒连接,内窥镜安装筒的侧面设有窗口,内窥镜安装筒的内壁上靠近窗口处连接有销钉连接座,内窥镜安装筒的销钉连接座上通过销钉连接有内窥镜铰链压板,内窥镜铰链压板位于内窥镜安装筒的窗口处,内窥镜铰链压板连接有前段压板和尾部压板。
14、优选地,动力装置包括上板、下板、导向架、四个固定柱、四个回转柱以及四个绞盘组件,下板与四个固定柱的中部固定连接,上板与四个固定柱的顶部固定连接,导向架与下板固定连接,回转柱的上端与上板转动连接,回转柱的下端与下板转动连接;导向架设有四个导向孔;绞盘组件设有绞盘,绞盘的上部通过轴承与上板转动连接,绞盘的下部通过轴承与下板转动连接,绞盘组件的下端向下从基座伸出;四个固定柱与基座固定连接;
15、第一钢丝、第二钢丝、第三钢丝、第四钢丝分别穿过导向架上的四个导向孔,第一钢丝、第二钢丝、第三钢丝、第四钢丝分别绕过四个回转柱后分别缠绕在四个绞盘组件的绞盘上,四个绞盘组件按照矩形布局,四个回转柱呈现v字形布局,四个回转柱位于四个绞盘组件之间。
16、优选地,绞盘组件包括绞盘、联轴器、被动转轴、输入轴、弹簧、○形橡胶圈,绞盘的中部设有丝槽,被动转轴设有插接部、轴承安装部、套接部、圆形凸台,输入轴设有插接部、圆盘部、套接部,被动转轴的插接部插入联轴器的下端,绞盘的下端插入联轴器的上端,绞盘通过联轴器与被动转轴连接,弹簧的上部套在被动转轴的套接部上,弹簧的下部套在输入轴的插接部上,输入轴的插接部插入被动转轴的套接部进行固定连接,弹簧的上端抵靠在被动转轴的圆形凸台上,弹簧的下端抵靠在输入轴的圆盘部上,○形橡胶圈套在输入轴的圆盘部的环形槽中;绞盘的上部通过轴承与上板连接,被动转轴的轴承安装部通过轴承与下板连接;基座和下板之间连接有四个圆筒壳体,输入轴的套接部向下从基座伸出,输入轴的套接部、圆盘部位于圆筒壳体中,被动转轴的套接部、圆形凸台位于圆筒壳体中,弹簧位于圆筒壳体中,○形橡胶圈被挤压在沿圆盘部和圆筒壳体的内壁之间;当外部动力盒中驱动电机的花键轴插入套接部时,输入轴的圆盘部与○形橡胶圈脱离,○形橡胶圈的阻力消失,输入轴旋转时,圆盘部和圆筒壳体的内壁之间有空隙。
17、优选地,碗形链节的侧面缺口的角度α是:
18、20°<α<50°。
19、优选地,α的角度值是30°。
20、优选地,碗形链节的侧面缺口的后侧设有两个后斜面,侧面缺口的前侧设有两个前斜面。
21、优选地,内窥镜安装筒连接有器械通道。
22、本发明的有益效果是,基于临床手术场景,实现了通道协同的多手术器械复合操作模式,应对复杂操作要求,可以实施复杂多样的手术动作,并满足临床需求。
23、本发明的柔性躯干运动过程稳定、可靠、精度高,柔顺性好,灵活性强,能够精准的调整内窥镜的姿态。
24、通过若干个具有球面端部的圆柱体形链节实现对若干个碗形链节已完成路径的固定,最终使柔性躯干绷紧、不松垮、稳定。通过控制若干个具有球面端部的圆柱体形链节,在一定程度上对柔性躯干的刚度进行控制。
25、柔性躯干整体能够移动,内窥镜的位置可调。
26、动力装置稳定性好,可靠性高。
27、本发明使用过程中,医生可以在操作舱里操作内窥镜通过结直肠、食管、尿道、胃、阴道等进入人体,能摆脱由于身体做手术时的疲劳,以及人为因素导致的失误,如果因超负荷手术后所产生的疲劳,可用本发明的暂停功能进行短暂休息(即让动力盒中的电机锁止实现暂停),也可以避免在操作过程中由于手抖或者因他人误碰导致器械在人体内急速位移产生的刮伤。
28、本发明进一步的特征,将在以下具体实施方式的描述中,得以清楚地记载。
- 还没有人留言评论。精彩留言会获得点赞!