一种智能控制医用真空负压机的制作方法
本发明涉及医疗相关,特别涉及一种智能控制医用真空负压机。
背景技术:
1、人们的健康离不开科学技术的不断发展,纵观人类发展史,人类同疾病较量最有力的武器就是科学技术,科技使医药领域的研究不断取得突破,且速度越来越快。人类过去几十年在信息收集、研究、疾病治疗和医患沟通等方面完成了众多创新。从望、闻、问、切到可穿戴设备监测健康数据,人工智能预测蛋白质结构;从治病到治未病;从医生为主到医生患者共同努力,让患者也参与到疾病的管理...越来越多的高新技术被运用到医学领域,挽救了数百万人的生命并改善了许多人的生活,其中,医用真空负压机作为医疗领域中必不可少的一环,用来吸除病人体内的脓、污血等分泌物,在手术急救过程中发挥着重要作用。
2、在现有的吸收病人体内污物的过程中,如公告号为cn207660801u的中国专利,其公开了一种医用真空负压机组,包括撬座、真空泵、真空罐及数控系统、除菌过滤器、管道、阀门,真空泵、真空罐固定在撬座上,真空泵至少两台,真空泵并联连接,在真空泵和真空罐相连的管道上安装有压力传感器,压力传感器通过电路与数控系统相连,真空泵通过管道与除菌过滤器连接,在真空泵和真空罐相连的管道上安装有阀门,在阀门和真空泵之间安装有真空电磁阀,真空罐下面有排污口,控制系统通过电路与真空泵、压力传感器、除菌过滤器、真空电磁阀连接,做到吸引安全、可靠、有效运行,保证负压供使用,并且维护时,可以不断电,真空负压机正常工作,整机占用空间小。
3、在上述现有技术中,主要通过真空泵制造吸力将人体污物通过管道吸入除菌过滤器中,污物经过除菌过滤器的净化被继续输送到真空罐中,由人工对真空罐进行定期清理,但是上述现有技术没有考虑到真空罐容纳极限的问题,当真空罐容纳污物过多时,会使污物蔓延回流到后续的管道与真空泵中,造成整个真空负压机组的损坏,其次设备的使用频率与每次使用时吸入的污物量存在不确定性,人员无法明确了解真空罐中的污物量,需要经常检查,增加了人员的工作负担,而且上述现有技术的使用范围有限,无法针对固体污物进行吸收处理,固体污物会卡在除菌过滤器中,使整个设备瘫痪,基于此,在现有的吸收病人体内污物技术之上,还有改进的空间。
技术实现思路
1、为了能够对医疗过程中产生的液体及固体污物进行智能化定量吸收与排出,本技术提供的一种智能控制医用真空负压机采用如下的技术方案:
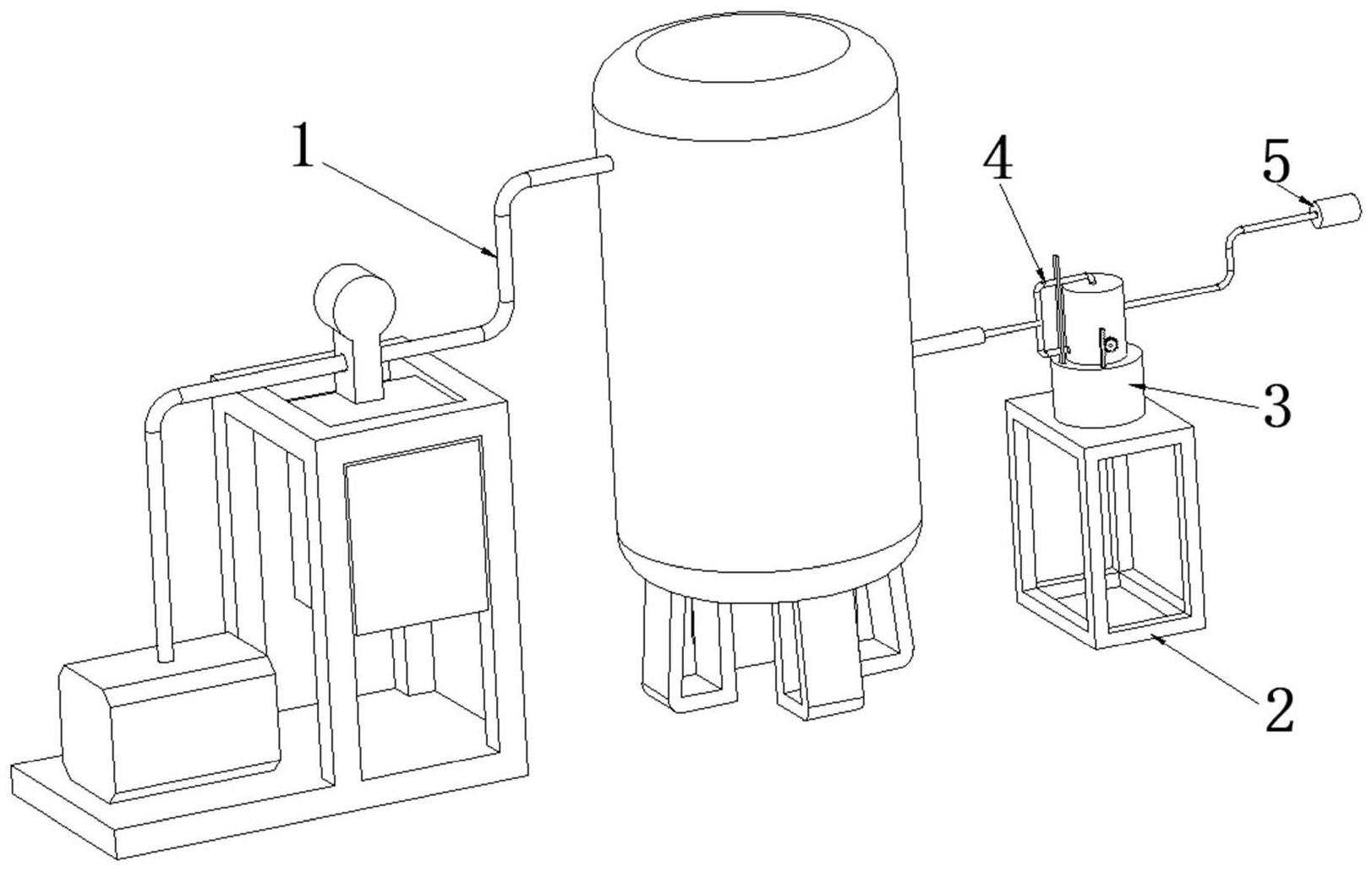
2、一种智能控制医用真空负压机,包括真空发生模块、支承架、壳体、三通管路、吸污模块、智能排污模块、动力模块,所述真空发生模块通过三通管路与壳体连接,壳体设置在支承架上,壳体的右侧设置有吸污模块,吸污模块为手持模块,起到引导污物进入本技术的作用,壳体的内部设置有智能排污模块,壳体的后侧设置有动力模块。
3、所述智能排污模块包括环形翻转机构、固体留置机构、重量触发机构、液体留置机构、浮动触发机构和联动机构,环形翻转机构转动设置在壳体中,环形翻转机构的下端安装有固体留置机构,固体留置机构将固液分离,并对固体杂质进行留置存储,环形翻转机构的后侧设置有重量触发机构,重量触发机构与动力模块之间为电连接,环形翻转机构通过联动机构与液体留置机构配合连接,液体留置机构将壳体分隔成了上下两个密闭的空腔,液体污物被液体留置机构阻拦在上空腔中,只有当液体留置机构打开时污物才能下落,壳体的后方侧壁上设置有浮动触发机构,浮动触发机构与动力模块之间为电连接,动力模块控制联动机构进行升降。
4、优选的,所述环形翻转机构包括翻转环、滑动环、转轴和压力弹簧,翻转环的前后两侧各设置有一个转轴,翻转环、固体留置机构通过转轴进行翻转从而达到将固体污物定量翻转下落的目的,转轴通过轴承与壳体连接,位于后侧的转轴中开设有滑动槽,翻转环内部的中空结构中上下滑动设置有滑动环,翻转环与滑动环之间通过压力弹簧连接,压力弹簧起到对滑动环的支撑作用。
5、优选的,所述固体留置机构包括金属网、增压板和限位件,金属网安装在滑动环的下端,金属网起到过滤和收纳作用,滑动环的外侧沿周向转动设置有弧形结构的增压板,在翻转环、金属网同步转动一百八十度后,固体杂质从金属网上下落,此时由于部分固体杂质会卡在金属网的网孔中,为了解决这一问题,本技术中处于金属网上方的增压板在重力作用下向下角度调节直到贴合在金属网表面,此时翻转后的金属网的表面密封区域增大,在下方吸力以及压力弹簧的作用下,扩大密封区域的金属网呈上下振动,从而对金属网上的固体进一步抖动,上下振动保证了固体杂质能够从金属网的网孔中大范围下落,位于增压板外侧的限位件安装在滑动环上,限位件对增压板的外侧进行限位,防止其向外侧角度调节的情况,保证了金属网翻转后增压板只能向内侧角度调节。
6、优选的,所述重量触发机构包括挤压杆和挤压件,挤压杆滑动安装在滑动槽中,挤压杆与滑动槽之间连接有内置弹簧,内置弹簧起复位作用,挤压杆的前端为半圆球面,滑动环的侧壁安装有挤压件,挤压件的截面为直角梯形,直角梯形斜面与半圆球面之间为挤压配合。
7、优选的,所述液体留置机构包括固定件、开合件、活动杆一、活动杆二和滑杆,固定件安装在壳体中,固定件的顶部为三角结构,三角结构利于污物下落,避免污物堆积在固定件上,固定件的前后两侧各通过销轴安装有一个开合件,固定件与开合件共同作用将壳体分隔成了上下两个密闭的空腔,当开合件向下调节角度时,两个密闭空腔连通,此时污物才能下落,前后两侧的开合件分别通过销轴与活动杆一、活动杆二的一端连接,活动杆一、活动杆二的另一端通过销轴与滑杆连接,滑杆上下滑动设置在壳体中,活动杆一、活动杆二、滑杆配合作用使开合件角度调整,完成开合动作。
8、优选的,所述浮动触发机构包括筒体、漂浮块和按压件,壳体的后侧连通安装有筒体,筒体的内壁设置有限位块,限位块上放置有漂浮块,漂浮块上设置有按压件,漂浮块会随着筒体内水平面的升降带动按压件一同升降。
9、优选的,所述联动机构包括连杆一、连杆二、连杆三、弹性件、齿条板和齿轮,连杆一安装在滑杆的后侧,连杆一的中部与防水布料材质的弹性件连接,弹性件安装在壳体开设的连接槽中,弹性件的设置保证了连杆一在上下移动时整个壳体内部的密封性,连杆二安装在滑杆左侧,连杆三安装在连杆二前侧,连杆三的前端安装有齿条板,与齿条板啮合的齿轮安装在前侧布置的转轴上,通过齿条板的上下移动带动齿轮来回旋转。
10、优选的,所述三通管路包括三通管和调节板,壳体的上端开设有吸气孔一,壳体侧壁开设的吸气孔二位于环形翻转机构的下方,真空发生模块、吸气孔一、吸气孔二之间连通安装有三通管,设置在连杆二上的调节板控制三通管的吸气方向,调节板从上往下依次开设有对应孔一、对应孔二,通过上下移动调节板从而使对应孔一、对应孔二交替与三通管路相连通,完成吸气方向在吸气孔一、吸气孔二之间的改变。
11、优选的,所述吸污模块包括吸污罩和软管,吸污罩与壳体之间通过软管连接。
12、优选的,所述动力模块包括绝缘壳、延时开关一、延时开关二、电源和气缸,绝缘壳设置在壳体的后侧,绝缘壳内部依次设置有延时开关一、延时开关二、电源和气缸,按压件与延时开关一之间的位置相对应,挤压杆与延时开关二之间的位置相对应,延时开关一、延时开关二、电源、气缸之间为电连接。延时开关一、电源、气缸形成电路一,延时开关二、电源、气缸形成电路二,且电路一与电路二为并联电路。
13、综上所述,本技术包括以下至少一种有益技术效果:
14、1、本发明所述的一种智能控制医用真空负压机,针对医疗过程中产生的污物进行收集清理,通过智能排污模块的双感应模式对固体污物、液体污物的输入量进行智能感应,当其中一项污物达到设定的储存上限时,智能排污模块会自动将固体、液体污物一并排出,减少了人员与医疗污物的接触频率以及工作强度。
15、2、环形翻转机构、固体留置机构、重量触发机构共同配合对输入壳体中的固体污物进行重量感应,当固体污物的重量达到预定值后,金属网进行翻转且开合件向下角度调节,从而对固体污物、液体污物进行排出,为了将金属网的网孔中可能留置的固体污物进一步排出,本技术通过设置的增压板在金属网翻转后其紧贴在金属网的表面,此时整体气路中的吸气孔一闭合,吸气孔二打开,使得气吸的位置下降至金属网下方(上方的吸气孔一闭合,下方的吸气孔二打开)在吸气孔二的气吸与压力弹簧的共同作用下,金属网上下振动,避免有固体杂质遗留在金属网上难以下落的情况。
16、3、浮动触发机构对输入壳体中的液体污物进行高度感应,随着壳体内液体污物的水平面不断上升,筒体内的漂浮块带动按压件不断上升,当按压件到达预定位置时,动力模块启动,气缸通过连杆一带动活动杆一、活动杆二和滑杆共同下降,使得开合件向下调节角度,使固体污物、液体污物排出。
17、4、延时开关一与延时开关二并联设置在电路中,保证了重量触发机构与浮动触发机构独立对气缸进行控制,使得本技术可对液体污物或固体污物进行单独吸纳,也可吸纳固体与液体污物的混合物,确保固体污物、液体污物中有一者达到预定值时即可触发气缸启动,使污物排出。
- 还没有人留言评论。精彩留言会获得点赞!