一种口腔医疗影像机器人多传感信息融合控制方法与流程
本发明涉及医疗,尤其涉及一种口腔医疗影像机器人多传感信息融合控制方法。
背景技术:
1、医学影像是指为了医疗或医学研究,对人体或人体某部分,以非侵入方式取得内部组织影像的技术与处理过程,随着各类影像采集设备逐步在基层医疗机构部署,越来越多的基层患者可以根据临床需求进行医疗影像采集,由于医学影像的诊断主要依靠医务人员专业技能和个人经验,基层医务人员相关技能水平不足,导致漏诊和误诊情况比较突出,针对于口腔科,出现了口腔医疗影像机器人,通过口腔医疗影像机器人来对人体的口腔进行医疗影像采集,降低了乌镇和漏诊情况。
2、但现有方式控制口腔医疗影像机器人的方法无法判断患者是否发生移动,而口腔医疗影像机器人在患者移动时仍然进行影像采集,从而导致影像采集效果较差。
技术实现思路
1、本发明的目的在于提供一种口腔医疗影像机器人多传感信息融合控制方法,旨在解决现有技术中现有方式控制口腔医疗影像机器人的方法无法判断患者是否发生移动,而口腔医疗影像机器人在患者移动时仍然进行影像采集,从而导致影像采集效果较差的技术问题。
2、为实现上述目的,本发明采用的一种口腔医疗影像机器人多传感信息融合控制方法,包括如下步骤:
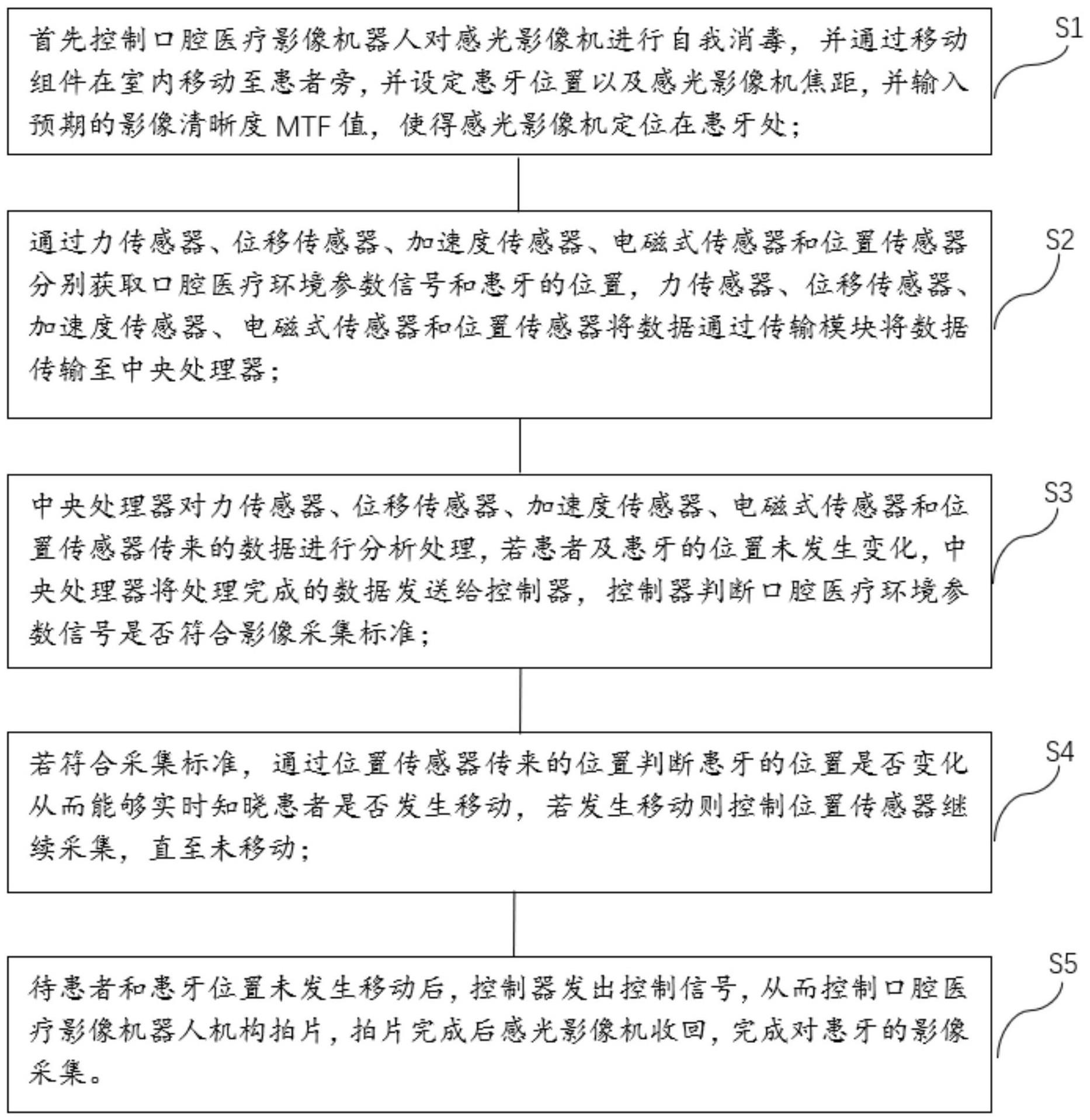
3、步骤一:首先控制口腔医疗影像机器人对感光影像机进行自我消毒,并通过移动组件在室内移动至患者旁,并设定患牙位置以及感光影像机焦距,并输入预期的影像清晰度mtf值,使得感光影像机定位在患牙处;
4、步骤二:通过力传感器、位移传感器、加速度传感器、电磁式传感器和位置传感器分别获取口腔医疗环境参数信号和患牙的位置,力传感器、位移传感器、加速度传感器、电磁式传感器和位置传感器将数据通过传输模块将数据传输至中央处理器;
5、步骤三:中央处理器对力传感器、位移传感器、加速度传感器、电磁式传感器和位置传感器传来的数据进行分析处理,若患者及患牙的位置未发生变化,中央处理器将处理完成的数据发送给控制器,控制器判断口腔医疗环境参数信号是否符合影像采集标准;
6、步骤四:若符合采集标准,通过位置传感器传来的位置判断患牙的位置是否变化从而能够实时知晓患者是否发生移动,若发生移动则控制位置传感器继续采集,直至未移动;
7、步骤五:待患者和患牙位置未发生移动后,控制器发出控制信号,从而控制口腔医疗影像机器人机构拍片,拍片完成后感光影像机收回,完成对患牙的影像采集。
8、其中,在步骤一中,对感光影像机进行自我消毒后,需要进行灭菌,消毒灭菌时间不低于30min。
9、其中,在步骤一中,口腔医疗影像机器人移动至指定位置后会进行自我微调校准,使之处于指定位置。
10、其中,在步骤二中,力传感器、位移传感器、加速度传感器、电磁式传感器和位置传感器将数据传输至实时中央处理器时还将数据传输至显示屏上显示出来,便于医疗人员观察。
11、其中,在步骤二中,中央处理器上设置有维护模块,通过维护模块可以对中央处理器进行维护。
12、其中,在步骤三中,央处理器将处理完成的数据发送给控制器的同时会将数据传输至存储模块进行存储。
13、其中,在步骤四中,当控制器通过位置传感器判断到患者及患牙发生位置移动时,控制器控制口腔医疗影像机器人对患者进行提醒。
14、本发明的一种口腔医疗影像机器人多传感信息融合控制方法,首先控制口腔医疗影像机器人对感光影像机进行自我消毒,并通过移动组件在室内移动至患者旁,并设定患牙位置以及感光影像机焦距,并输入预期的影像清晰度mtf值,使得感光影像机定位在患牙处,通过力传感器、位移传感器、加速度传感器、电磁式传感器和位置传感器分别获取口腔医疗环境参数信号和患牙的位置,力传感器、位移传感器、加速度传感器、电磁式传感器和位置传感器将数据通过传输模块将数据传输至中央处理器,中央处理器对力传感器、位移传感器、加速度传感器、电磁式传感器和位置传感器传来的数据进行分析处理,若患者及患牙的位置未发生变化,中央处理器将处理完成的数据发送给控制器,控制器判断口腔医疗环境参数信号是否符合影像采集标准,若符合采集标准,通过位置传感器传来的位置判断患牙的位置是否变化从而能够实时知晓患者是否发生移动,若发生移动则控制位置传感器继续采集,直至未移动,待患者和患牙位置未发生移动后,控制器发出控制信号,从而控制口腔医疗影像机器人机构拍片,拍片完成后感光影像机收回,完成对患牙的影像采集,以此方式能够实时知晓患者是否移动,不会在移动时进行影像采集。
技术特征:
1.一种口腔医疗影像机器人多传感信息融合控制方法,其特征在于,包括如下步骤:
2.如权利要求1所述的口腔医疗影像机器人多传感信息融合控制方法,其特征在于,
3.如权利要求2所述的口腔医疗影像机器人多传感信息融合控制方法,其特征在于,
4.如权利要求3所述的口腔医疗影像机器人多传感信息融合控制方法,其特征在于,
5.如权利要求4所述的口腔医疗影像机器人多传感信息融合控制方法,其特征在于,
6.如权利要求5所述的口腔医疗影像机器人多传感信息融合控制方法,其特征在于,
7.如权利要求6所述的口腔医疗影像机器人多传感信息融合控制方法,其特征在于,
技术总结
本发明涉及医疗技术领域,尤其涉及一种口腔医疗影像机器人多传感信息融合控制方法,首先控制口腔医疗影像机器人对感光影像机进行自我消毒,并设定患牙位置以及感光影像机焦距,位置传感器获取口腔医疗环境参数信号和患牙的位置,控制器判断口腔医疗环境参数信号是否符合影像采集标准,若符合采集标准,通过位置传感器传来的位置判断患牙的位置是否变化从而能够实时知晓患者是否发生移动,若发生移动则控制位置传感器继续采集,直至未移动,待患者和患牙位置未发生移动后,控制器发出控制信号,从而控制口腔医疗影像机器人机构拍片,以此方式能够实时知晓患者是否移动,不会在移动时进行影像采集。
技术研发人员:沈珂,徐丹
受保护的技术使用者:南京厚麟智能装饰有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!