一种穿刺增强的穿刺针位置的校准方法及系统与流程
本发明属于图像处理,涉及一种穿刺增强的穿刺针位置的校准方法及系统。
背景技术:
1、超声穿刺增强是一种高级成像功能,其目的在于对穿刺针进行实时的增强显示,以便在介入性手术中引导医生更好地进针,从而使手术得以更安全和更快速的完成。为了使探头能接收到穿刺针的最大回声,需要进行偏转发射从而使针最大程度的可视化。徒手穿刺的成像过程中,穿刺针实际的进针角度难以保证与用户设定的进针角度完全一致。当两者偏差较大时,由于超声成像的物理特性会导致偏转图像中的显示针与实际针位置存在偏差,严重影响诊断的结果,因而对穿刺针的位置校准就变得尤为重要。
2、中国专利文献公开了“穿刺增强方法及系统”,其申请公布号为cn 105496515a,该发明专利基于多个角度的偏转帧分别进行针检测后挑选概率最大的穿刺针,将不同发射角度下所对应的识别概率最高的穿刺针的插入取向作为真实的穿刺针的插入取向。
3、中国专利文献公开了“用于增强超声成像中针可视化的方法与装置”,其申请公布号为cn 102525547a,该发明专利基于多个角度的偏转帧复合成像,给不同转向角的射束施加不同的增益以补偿每个射束自针的不同反射效果。
4、以上两种方法的缺点在于都需要发射多个角度的偏转帧,计算复杂度高,实时性差。因此,需要对偏转图像中的穿刺针位置进行校准,最终得到与真实穿刺针位置完全一致的增强穿刺针。
技术实现思路
1、鉴于以上所述现有技术的缺点,本发明的目的在于提供一种穿刺增强的穿刺针位置的校准方法及系统,用于解决当穿刺针实际的进针角度和系统预设的进针角度不一致时,由于超声成像的物理特性,导致偏转图像中的显示针与实际针位置存在偏差,严重影响诊断结果的问题。
2、为实现上述目的及其他相关目的,本发明提供一种穿刺增强的穿刺针位置的校准方法,包括以下步骤:
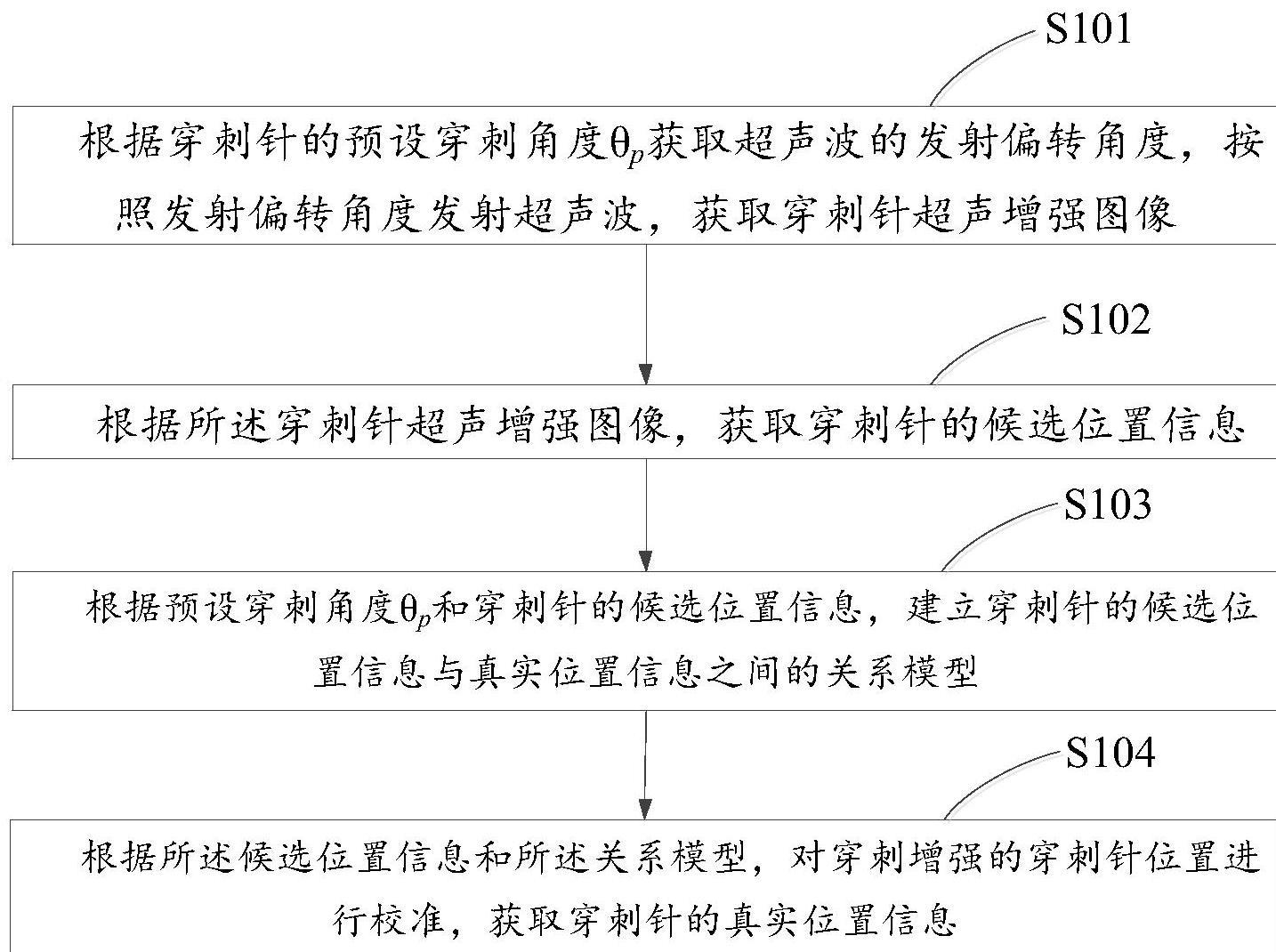
3、根据穿刺针的预设穿刺角度θp获取超声波的发射偏转角度,按照发射偏转角度发射超声波,获取穿刺针超声增强图像;获取超声波的发射偏转角度的计算原则为:保证超声发射声束方向与穿刺针垂直;
4、根据所述穿刺针超声增强图像,获取穿刺针的候选位置信息;所述候选位置信息为虚假位置信息。
5、根据预设穿刺角度θp和穿刺针的候选位置信息,建立穿刺针的候选位置信息与真实位置信息之间的关系模型;
6、根据所述候选位置信息和所述关系模型,对穿刺增强的穿刺针位置进行校准,获取穿刺针的真实位置信息;
7、所述预设穿刺角度θp为穿刺针与界面s垂线方向的预设夹角;所述界面s为超声探头与待穿刺部位的接触面。
8、本技术的上述技术方案仅基于单次发射偏转帧,通过建立穿刺针的候选位置信息与真实位置信息之间的关系模型,即可高效实现对偏转图像中的穿刺针位置的校准,得到与真实穿刺针位置完全一致的增强穿刺针,计算复杂度低,实时性强,能够解决穿刺针位置偏移的问题,提高穿刺针位置显示的准确性,增加临床诊断的可靠性。
9、作为优选,采用数字图像处理算法获取穿刺针的候选位置信息。
10、作为优选,所述数字图像处理算法选自位置检测算法、边缘检测算法和直线检测算法中的一种或多种。
11、更优选地,所述位置检测算法选自模板匹配算法和特征提取算法中的一种或两种。所述位置检测算法是通过图像中物体的位置和形状信息来检测物体的位置。
12、更优选地,所述边缘检测方法选自sobel算法、prewitt算法和canny算法中的一种。边缘检测算法是基于图像中像素值的变化来检测图像中的边缘。
13、更优选地,所述直线检测算法选自hough算法、lsd算法和fld算法中的一种。直线检测算法是基于边缘检测结果,通过检测连续的边缘点来确定直线的位置和方向。以hough算法为例,检测到的极径和极角分别为rho、θf,θf即为虚假角度。因而检测到的虚假针尖坐标t,(xf,yf)=(rho*cos(θf)+xe,rho*sin(θf))。
14、作为优选,所述候选位置信息包括候选穿刺角度θf和候选穿刺针坐标t,(xf,yf);所述候选穿刺角度θf为穿刺针超声增强图像中穿刺针与界面s垂线方向的夹角。
15、作为优选,所述穿刺针的候选位置信息与真实位置信息之间的关系模型包括第一关系模型和第二关系模型;所述真实位置信息包括真实穿刺角度θt和真实穿刺针坐标t(xt,yt);所述真实穿刺角度θt为真实穿刺针与界面s垂线方向的夹角。
16、作为优选,所述第一关系模型为预设穿刺角度θp、候选穿刺角度θf与真实穿刺角度θt之间的关系模型;所述第二关系模型为预设穿刺角度θp、候选穿刺针坐标t,(xf,yf)与真实穿刺针坐标t(xt,yt)之间的关系模型。
17、作为优选,所述第一关系模型为:
18、
19、作为优选,所述第二关系模型为:
20、
21、
22、其中,et,为所述穿刺针超声增强图像中超声探头e与候选穿刺针坐标t,之间的距离。
23、作为优选,根据所述候选位置信息和关系模型,对穿刺增强的穿刺针位置进行校准,包括:
24、根据所述候选穿刺角度θf和第一关系模型,计算穿刺针的真实穿刺角度θt;
25、根据候选穿刺针坐标t,(xf,yf)和第二关系模型,计算穿刺针的真实穿刺针坐标t(xt,yt);。
26、根据穿刺针的真实穿刺角度θt和真实穿刺针坐标t(xt,yt)对穿刺增强的穿刺针位置进行校准。根据第二关系模型中的二元线性方程组求解可得完整的真实穿刺针坐标t(xt,yt),根据完整的坐标信息即可对穿刺增强的穿刺针位置进行校准。
27、作为优选,所述候选穿刺针坐标t,(xf,yf)和真实穿刺针坐标t(xt,yt)以所述穿刺针超声增强图像为平面,基于以超声探头为坐标轴原点,以界面s为x轴,以界面s垂线方向为y轴的直角坐标系设定。所述候选穿刺针坐标t,(xf,yf)指的是穿刺针超声增强图像上显示的虚假穿刺针上任意一点的坐标,所述真实穿刺针坐标t(xt,yt)为真实穿刺针上与候选穿刺针坐标t,(xf,yf)相对应的坐标。
28、本发明还提供了一种穿刺增强的穿刺针位置的校准系统,包括若干超声探头、穿刺针、显示器,所述超声探头用于发射和接收超声波,所述显示器用于显示超声波扫描输出的穿刺针超声增强图像,还包括穿刺增强的穿刺针位置的校准装置;所述校准装置包括:
29、图像获取单元,用于根据穿刺针的预设穿刺角度θp获取超声波的发射偏转角度,按照发射偏转角度发射超声波,获取穿刺针超声增强图像;
30、信息处理单元,用于根据所述穿刺针超声增强图像,获取穿刺针的候选位置信息;
31、建模单元,用于根据预设穿刺角度θp和穿刺针的候选位置信息,建立穿刺针的候选位置信息与真实位置信息之间的关系模型;
32、校准单元,用于根据所述候选位置信息和所述关系模型,对穿刺增强的穿刺针位置进行校准,获取穿刺针的真实位置信息;
33、所述预设穿刺角度θp为穿刺针与界面s垂线方向的预设夹角;所述界面s为超声探头与待穿刺部位的接触面。
34、作为优选,所述信息处理单元包括:
35、角度获取子单元,用于根据所述穿刺针超声增强图像获取穿刺针的候选穿刺角度θf,所述候选穿刺角度θf为穿刺针超声增强图像中穿刺针与界面s垂线方向的夹角;
36、坐标获取子单元,用于根据所述穿刺针超声增强图像获取穿刺针的候选穿刺针坐标t,(xf,yf)。
37、作为优选,所述建模单元包括:
38、第一建模子单元,用于建立第一关系模型,所述第一关系模型为预设穿刺角度θp、候选穿刺角度θf与真实穿刺角度θt之间的关系模型;
39、第二建模子单元,用于建立第二关系模型,所述第二关系模型为预设穿刺角度θp、候选穿刺针坐标t,(xf,yf)与真实穿刺针坐标t(xt,yt)之间的关系模型;
40、所述真实位置信息包括真实穿刺角度θt和真实穿刺针坐标t(xt,yt);所述真实穿刺角度θt为真实穿刺针与界面s垂线方向的夹角。
41、作为优选,所述第一关系模型为:
42、
43、作为优选,所述第二关系模型为:
44、
45、
46、其中,et,为所述穿刺针超声增强图像中超声探头e与候选穿刺针坐标t,之间的距离。
47、作为优选,所述校准单元包括:
48、角度计算子单元,用于根据所述候选穿刺角度θf和第一关系模型,计算穿刺针的真实穿刺角度θt;
49、坐标计算子单元,用于根据候选穿刺针坐标t,(xf,yf)和第二关系模型,计算穿刺针的真实穿刺针坐标t(xt,yt);
50、校准子单元,用于根据穿刺针的真实穿刺角度θt和真实穿刺针坐标t(xt,yt)对穿刺增强的穿刺针位置进行校准;
51、所述候选穿刺针坐标t,(xf,yf)和真实穿刺针坐标t(xt,yt)以所述穿刺针超声增强图像为平面,基于以超声探头为坐标轴原点,以界面s为x轴,以界面s垂线方向为y轴的直角坐标系设定。
52、本发明还提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现本发明所述穿刺增强的穿刺针位置的校准方法的步骤。
53、本发明还提供了一种计算机处理设备,包括处理器及计算机可读存储介质,所述的处理器执行所述计算机可读存储介质上的计算机程序,实现本发明所述穿刺增强的穿刺针位置的校准方法的步骤。
54、如上所述,本发明所述的穿刺增强的穿刺针位置的校准方法及系统,具有以下有益效果:仅基于单次发射偏转帧,通过建立穿刺针的候选位置信息与真实位置信息之间的关系模型,即可高效实现对偏转图像中的穿刺针位置的校准,得到与真实穿刺针位置完全一致的增强穿刺针,计算复杂度低,实时性强,能够解决穿刺针位置偏移的问题,提高穿刺针位置显示的准确性,增加临床诊断的可靠性。
- 还没有人留言评论。精彩留言会获得点赞!