手术机器人术前摆位方法、摆位系统及可读存储介质与流程
本发明涉及医疗器械,特别涉及一种手术机器人术前摆位方法、摆位系统及可读存储介质。
背景技术:
1、腹腔微创手术普遍使用于泌尿外科、普外科及妇科等多个科室。在现有的临床手术中,助手医生往往根据传统外科或多孔手术机器人系统的开孔经验进行术前的打孔规划,打孔后安装戳卡,戳卡位置固定后难免碰到手术机器人系统难以调整到合适位置,若手术台车等从端设备的规划位置不合适,一旦戳卡安装后手术空间有限,则会导致机械臂后续操作困难,此时需要反复的调整从端设备。目前,针对不同的适应症,打孔以及手术台车的位置规划依托于较高的经验判断,且很难保证腹腔孔相对于单臂手术机器人系统的适应性。
2、因此,需要一种手术机器人术前摆位方法、摆位系统及可读存储介质,使得戳卡以及从端设备的目标摆放位置相匹配,进而减少术前准备和调整时间,加快手术进度,且缩短实际操作时间。
技术实现思路
1、本发明提供了一种手术机器人术前摆位方法、摆位系统及可读存储介质,该方法通过提前确定戳卡位置并且逆解可移动设备的机械臂的各个关节姿态信息,并依据各个关节姿态信息确定可移动设备的目标摆放位置,进而保证机械臂在合适的角度范围内工作,以改善反复的调整可移动设备的现象,减少术前准备和调整时间。
2、所述手术机器人术前摆位方法,包括:
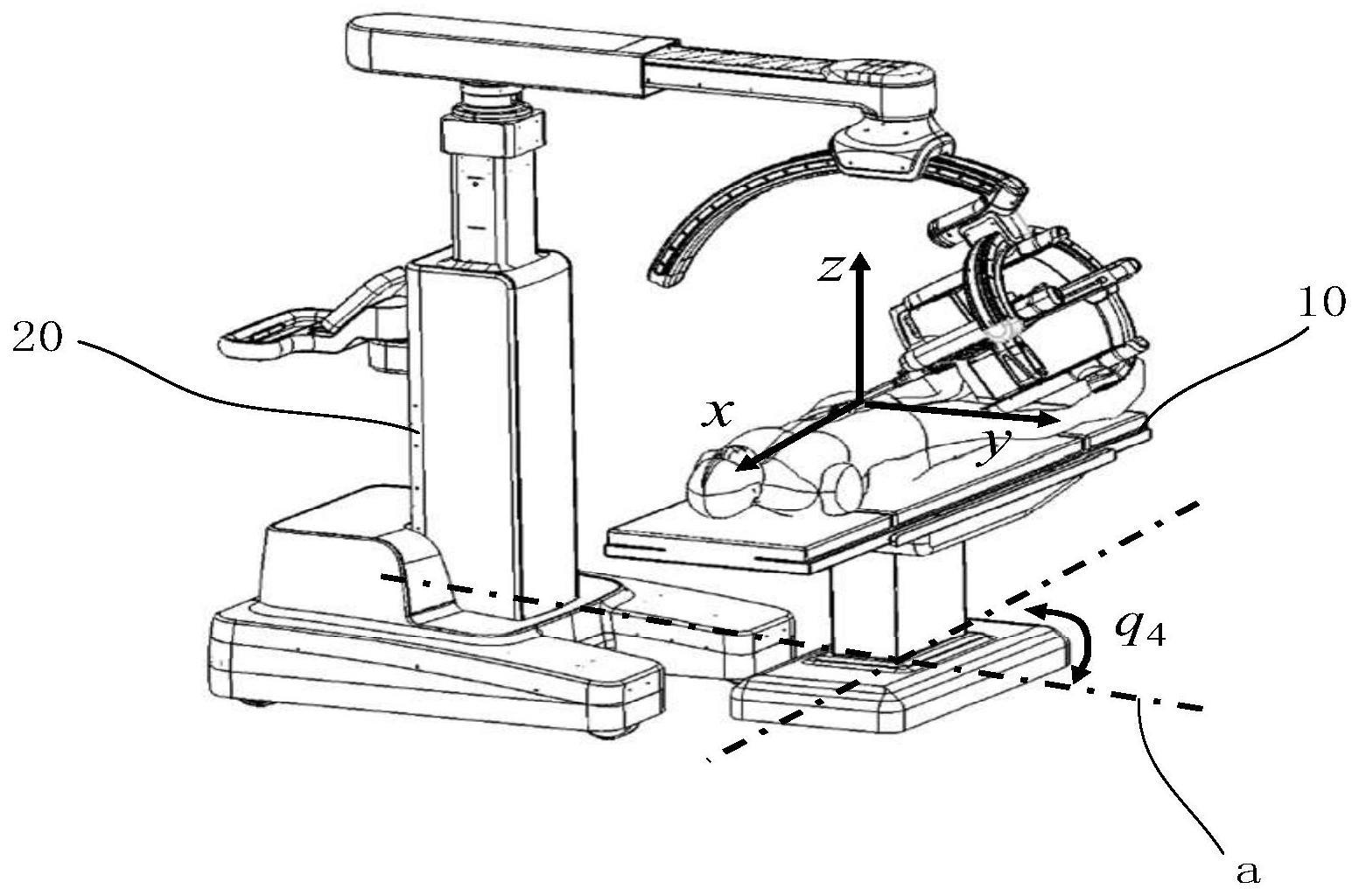
3、确定目标对象在床体的床板上时,位于目标对象上的参考位,并获取所述参考位相对所述床体的位置,基于所述参考位建立第一坐标系;
4、获取目标对象上的目标位置,并确定戳卡在所述第一坐标系中的姿态信息;
5、基于所述戳卡的所述姿态信息对可移动设备上的机械臂的关节求逆,得出所述机械臂的执行端与所述戳卡姿态匹配时,所述机械臂各关节的在所述第一坐标系中的初始姿态信息;
6、基于所述机械臂各关节的所述初始姿态信息确定所述可移动设备的目标摆放位置。
7、可选地,所述摆位方法还包括,基于所述目标位置调整所述目标对象躺在床体上的最终姿态,建立所述最终姿态与所述第一坐标系的映射关系。
8、可选地,所述摆位方法还包括,获取床体不动点的三维坐标信息,并以所述不动点建立第二坐标系;
9、基于所述目标位置调整床体的床板姿态,确定所述床板调整后的姿态,基于所述床板调整后的姿态建立第二坐标系与第一坐标系的映射关系。
10、可选地,所述摆位方法还包括,基于所述床板的调整后的姿态确定所述戳卡最终姿态,并基于所述戳卡最终姿态更新所述机械臂的执行端与所述戳卡最终姿态匹配时,所述机械臂各关节的在所述第一坐标系中的姿态信息,并更新所述可移动设备的目标摆放位置。
11、可选地,所述摆位方法还包括,计算所述戳卡至所述目标位置的距离a,并基于距离a确定获取所述目标位置的图像的内窥镜种类;若距离a大于柔性内窥镜的可展开尺寸时,确定内窥镜种类为柔性内窥镜。
12、可选地,所述摆位方法还包括,若距离a小于柔性内窥镜的可展开尺寸时,确定内窥镜种类为刚性内窥镜。
13、可选地,获取目标对象上的目标位置包括:
14、确定标准对象;
15、确定所述标准对象在所述床体的床板上呈平躺姿态时的标准参考位,获得所述标准参考位相对所述床体的标准位置,并获取所述标准对象对应的标准目标位置,建立所述标准对象的标准目标位置与所述标准对象的标准参考位之间的标准向量;
16、基于所述目标对象的基本信息确定修正系数,所述标准向量乘以修正系数得到所述目标对象的参考位相对目标对象的目标位置的位置关系。
17、可选地,所述修正系数包括身高修正系数;和/或/;体重修正系数;和/或;气腹压修正系数。
18、可选地,所述摆位方法还包括,所述可移动设备的目标摆放位置确定后,将所述床体的三维模型、所述可移动设备的三维模型位于所述目标摆放位置、以及目标对象平躺在所述床体的所述三维模型的图像叠加显示。
19、本发明还提供了一种摆位系统,包括:
20、定位装置,用于获取床体三维坐标信息;
21、显示装置,用于将可移动设备的三维模型、床体的三维模型、目标对象的三维模型以及可移动设备的目标摆放位置显示于显示装置中;以及,
22、控制单元,与所述定位装置及所述显示装置通讯连接,并被配置用于执行上述所述的手术机器人术前摆位方法。
23、本发明还提供了一种可读存储介质,其特征在于,当所述程序被执行时,执行上述所述的手术机器人术前摆位方法。
24、如此配置,本发明通过提前确定戳卡位置并且逆解可移动设备的机械臂的各个关节姿态信息,并依据各个关节姿态信息确定可移动设备的目标摆放位置,进而保证可移动设备的机械臂在合适的角度范围内工作,以改善反复的调整可移动设备的现象,减少术前准备和调整时间,并且可避免机械臂受到戳卡位置而操作受限的现象;该方法使得戳卡的位姿确定以及手术台车的位置规划并不依托于较高的经验判断,一方面可简化手术流程,另一方面改善误判现象,可以精确的保证腹腔孔相对于单臂手术机器人系统的适应性。
技术特征:
1.一种手术机器人术前摆位方法,其特征在于,包括:
2.如权利要求1所述的手术机器人术前摆位方法,其特征在于,所述摆位方法还包括,基于所述目标位置调整所述目标对象躺在床体上的最终姿态,建立所述最终姿态与所述第一坐标系的映射关系。
3.如权利要求1所述的手术机器人术前摆位方法,其特征在于,所述摆位方法还包括,获取床体不动点的三维坐标信息,并以所述不动点建立第二坐标系;
4.如权利要求3所述的手术机器人术前摆位方法,其特征在于,所述摆位方法还包括,基于所述床板的调整后的姿态确定所述戳卡最终姿态,并基于所述戳卡最终姿态更新所述机械臂的执行端与所述戳卡最终姿态匹配时,所述机械臂各关节的在所述第一坐标系中的姿态信息,并更新所述可移动设备的目标摆放位置。
5.如权利要求1所述的手术机器人术前摆位方法,其特征在于,所述摆位方法还包括,计算所述戳卡至所述目标位置的距离a,并基于距离a确定获取所述目标位置的图像的内窥镜种类;
6.如权利要求1所述的手术机器人术前摆位方法,其特征在于,获取目标对象上的目标位置包括:
7.如权利要求6所述的手术机器人术前摆位方法,其特征在于,所述修正系数包括身高修正系数;和/或/;体重修正系数;和/或;气腹压修正系数。
8.如权利要求1所述的手术机器人术前摆位方法,其特征在于,所述摆位方法还包括,所述可移动设备的目标摆放位置确定后,将所述床体的三维模型、所述可移动设备的三维模型位于所述目标摆放位置、以及目标对象平躺在所述床体的所述三维模型的图像叠加显示。
9.一种摆位系统,其特征在于,包括:
10.一种可读存储介质,其特征在于,当程序被执行时,执行如权利要求1-8中任一项所述的手术机器人术前摆位方法。
技术总结
本发明涉及医疗器械技术领域,提供了一种手术机器人术前摆位方法、摆位系统及可读存储介质,所述手术机器人术前摆位方法包括:确定目标对象在床体的床板上呈平躺姿态时,位于目标对象上的参考位,并获取所述参考位相对所述床体的位置,并基于该参考位建立第一坐标系;获取目标对象上的目标位置,并确定戳卡在所述第一坐标系中的姿态信息;基于所述戳卡的所述姿态信息对可移动设备上的机械臂的关节求逆,得出所述机械臂各关节的在所述第一坐标系中的初始姿态信息;确定所述可移动设备的目标摆放位置。如此配置,本发明可改善反复的调整可移动设备的现象,减少术前准备和调整时间,并且可避免机械臂受到戳卡位置而操作受限的现象。
技术研发人员:请求不公布姓名
受保护的技术使用者:上海微创医疗机器人(集团)股份有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!