带有束缚组件的功能模块定位装置的制作方法
本发明涉及医疗器械,特别是涉及一种带有束缚组件的功能模块定位装置。
背景技术:
1、经皮穿刺手术是临床中常见的一类手术,通过经皮穿刺可以完成病理分析、药物注入、积液引流,也可以进行多种微创治疗,例如微波消融、射频消融、粒子植入等。穿刺治疗有着创伤小、恢复快、疗效好的特点,近年来被越来越多的医疗机构广泛开展。但该手术要求术者将穿刺针精准地穿刺到特定病患位置,有着较高的精度要求。为了提高穿刺精度,医生通常会使用一种穿刺定位引导支架,在支架末端安装穿刺针引导器或穿刺针引导模板,在引导器或引导模板的作用下将一根或多根穿刺针精准地进行穿刺。还可以在穿刺引导模板上增加陀螺仪与计算单元,通过陀螺仪与计算单元来确定当前位置与目标位置的差异并更直观地将姿态的偏差显示出来,医生可以根据这种偏差快速理解手动调节的方向与尺度,从而协助手术人员进行穿刺定位。
2、但是对于大部分胸腹部穿刺手术来说,由于生物体处于局麻状态,因此仍然可能会在手术中出现呼吸运动或身体颤动,这对于刚性定位的穿刺针来说就非常危险,因此有必要采用一定的束缚装置来约束生物体的身体运动。
3、除了上述穿刺针引导器或穿刺针引导模板之外,很多手术的手术器械均需要进行高精度的支撑定位,因此对手术器械的支撑定位技术进行改进优化就具有迫切的市场需求。同时手术器械在手术过程中需要对生物体进行更稳定的固定,减少手术中可能产生的不利影响,才能提高手术效率,有效缩短手术时间,提高手术精度。
技术实现思路
1、本发明的目的是提供带有束缚组件的功能模块定位装置,解决现有技术中采用人工手动操作存在的操作精度低、人员易疲劳、单臂支撑不稳定性以及功能模块安装、调节复杂的问题,并能将生物体固定住,避免手术过程中出现生物体晃动偏斜。
2、本发明的上述技术目的是通过以下技术方案得以实现的:
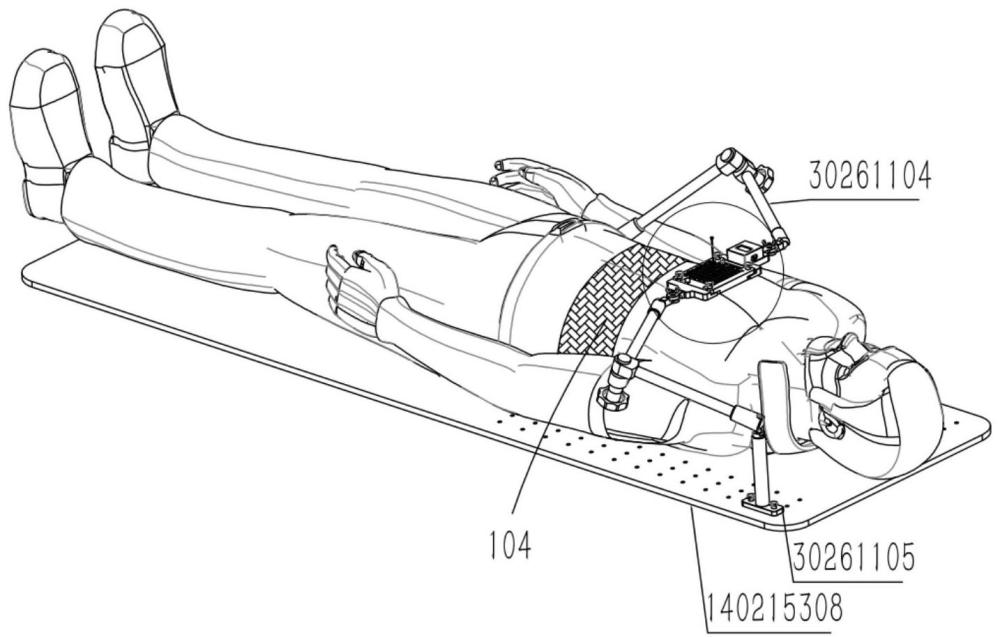
3、带有束缚组件的功能模块定位装置,包括调节臂和功能模块,所述调节臂与功能模块连接,功能模块用于实现手术中的各种功能,调节臂能够调节并锁紧至少3个自由度,使其末端能够调节到其工作空间中的任意位置并锁紧功能模块的空间位姿;
4、所述调节臂可拆卸地安装在基座上,基座与生物体保持相对静止所述基座上固定装设有用于固定生物体的第一束缚组件。
5、作为优选,所述基座是可供生物体抵压的底板,所述底板上阵列式布置有多个固定孔,调节臂直接安装在底板的固定孔上或调节臂通过一个垂直于底板的第一延长杆安装在底板的固定孔上,固定孔与调节臂或第一延长杆之间的连接方式是采用螺纹连接、卡扣连接或锁扣连接,能够实现调节臂或第一延长杆的快速安装和拆卸,底板采用碳纤维板或塑料板,从而减少ct伪影。或所述基座是与手术床连接固定的手术床固定装置,所述手术床固定装置包括螺纹结构、夹钳组件或锁紧杆组件,调节臂直接安装在手术床固定装置上或调节臂通过一个垂直设置的第二延长杆设置在手术床固定装置上;或所述基座是与生物体的外形相适配的模板,模板为3d打印模板、柔性可变形模板中的一种或组合;或所述基座是颅脑辅助定位支架,所述颅脑辅助定位支架上设有至少一个能够安装调节臂的位置,调节臂上连接有功能模块。
6、作为优选,所述底板与第一束缚组件的固定方式为粘胶、魔术贴、扎带、螺纹连接、夹钳的一种或多种组合。
7、作为优选,所述第一束缚组件采用真空束缚袋,真空束缚袋内填充有松散的填充物,真空束缚袋上设置有阀门,通过阀门抽取真空束缚袋内的气体实现真空束缚袋贴合生物体并固定形状;
8、或者第一束缚组件采用热塑性固定支架,能够通过对热塑性固定支架进行加热软化使其变形,然后冷却硬化定型的贴合在生物体的体表上;
9、或者第一束缚组件采用半刚性材料的支撑体固定生物体;
10、或者第一束缚组件采用刚性固定器固定生物体;
11、或者第一束缚组件采用具有弹性的束缚带,通过魔术贴、挂钩、粘钩、扣子中的一种或多种组合方式实现对生物体的束缚固定;
12、或者第一束缚组件采用铰链支架,通过多组铰链连接单元与设于铰链上的锁紧机构实现铰链支架的弯折与锁紧;
13、或者第一束缚组件为连接在底板上的多组调节柱,所述调节柱上端安装有锁扣,通过锁扣固定生物体,通过将不同长度的调节柱进行排列组合,各调节柱能够实现在不同高度上锁紧生物体的不同部位;
14、或者第一束缚组件采用上述真空束缚袋、热塑性固定支架、半刚性支撑体、刚性固定器、束缚带、铰链支架、调节柱的多种组合。
15、作为优选,所述调节臂的末端设置有用于固定生物体的第二束缚组件,第二束缚组件位于生物体上方;所述第二束缚组件包括按压器与下压机构,下压机构驱动按压器逐步向下运动,按压住生物体,按压器呈弧形贴合生物体体表,从而实现对生物体的固定;所述按压器设有柔性部,所述柔性部由硅胶、塑料、橡胶、乳胶中的一种或多种组合制成;所述下压机构为丝杠螺母机构、齿轮齿条机构、连杆机构、同步带传动机构。
16、作为优选,所述功能模块为穿刺引导模块、内窥镜支撑架、牵拉器、摄像头模块中的一种或多种组合。所述穿刺引导模块用于引导至少一根穿刺针沿预设的穿刺路径穿刺;穿刺引导模块上设有与穿刺针外径相适配的穿刺引导部,所述穿刺引导部与穿刺针间隙配合,实现导向作用;所述内窥镜支撑架能够装夹内窥镜,调节臂能够快速锁紧和释放每个自由度从而固定或调节内窥镜的空间位姿;所述内窥镜包括腹腔镜、胸腔镜、宫腔镜;所述调节臂的末端配合安装在内窥镜支撑架上;所述牵拉器上设有牵拉钩,用于将生物体组织牵拉住;所述摄像头模块通过连接基座连接在调节臂的末端,或连接基座上延伸出至少一个调节支撑臂,摄像头模块安装在调节支撑臂上,调节支撑臂能够进行弯折定型、旋转调节或移动调节的一种或多种组合。
17、作为优选,所述调节臂与功能模块刚性连接或通过快速连接部连接,当通过快速连接部连接时,快速连接部设有至少一组,快速连接部的连接方式采用螺纹连接或卡爪连接;
18、所述快速连接部包括在多个角度都能够快速定位并锁紧的第一啮合板和第二啮合板,所述第一啮合板上设有中心通孔,第二啮合板上设有螺纹连接孔,锁紧螺栓穿过第一啮合板上的中心通孔与螺纹连接孔锁紧连接,能够使第一啮合板和第二啮合板绕中心通孔的轴线转动并锁紧固定,所述中心通孔的轴线方向垂直于功能模块所在的平面,从而方便双调节臂在空间中的调节与手术环境的布置;或者所述中心通孔的轴线方向平行于功能模块所在的平面;所述中心通孔的轴线与调节臂的末端万向节的轴线或调节臂的末端球铰的输出杆的轴线呈一定角度,该角度优选30~90°。
19、作为优选,所述调节臂设置至少一组,当所述调节臂设置有多组时,多组调节臂之间相互连接或通过功能模块相互连接;
20、当调节臂设有一组时,调节臂的末端安装在功能模块的一侧;当调节臂设有两组时,两组调节臂的末端分别配合安装在同一个功能模块的两侧或同一侧。
21、作为优选,所述调节臂为被动调节支架,被动调节支架为机械式阻尼臂、机械螺纹锁紧臂、机械液压锁紧臂、蛇形锁紧臂、电磁制动式定位支架、气压制动式定位支架、液压制动式定位支架中的一种或多种组合。
22、作为优选,所述被动调节支架采用机械螺纹锁紧臂,在调节臂的关节处或滑块处设有松紧螺丝,通过松紧螺丝能够锁紧或释放调节臂单个关节或单个滑块,或同时锁紧多个自由度;
23、或所述被动调节支架为机械液压锁紧臂,机械液压锁紧臂通过加压机构给液压油加压,液压油推动压紧活塞锁紧球铰或压紧铰链实现所有自由度的锁紧;所述加压机构为活塞加压机构,通过第一传动机构驱动活塞向内运动,实现对液压油的加压,所述第一传动机构由手动驱动或电机驱动;或者所述加压机构为液压泵;
24、所述机械液压锁紧臂包括首尾两个球铰和中间的一个旋转铰链,被动调节支架包括两段连杆,两连杆通过旋转铰链连接,两连杆的末端分别设有一个球铰,两连杆均为空心结构,内部设有压紧活塞,压紧活塞抵住球铰的一侧实现对球铰的锁紧与松脱,中间的旋转铰链也为空心结构,且与两连杆的内部空腔贯通,旋转铰链设有旋转扣结构,能够在保持密封的情况下实现旋转铰接,当空腔内的液压油压力增大时,两个球铰被压紧活塞锁紧,旋转扣结构也被压紧,实现对旋转铰链的锁紧,从而最终实现所有自由度的锁紧;
25、或所述被动调节支架通过电机带动联动锁紧机构,使被动调节支架上所有自由度锁紧,联动锁紧机构为丝杆和丝杆螺母配合结构,被动调节支架的关节部位装设有丝杠电机,丝杠电机的丝杠深入到支架内部,且丝杠上配合装设有丝杠螺母,所述丝杠旋转会带动丝杠螺母向支架的关节内部压紧,所述支架包括第一支架和第二支架,所述第一支架和第二支架密封连接,所述第一支架和第二支架内分别装设有活塞杆,活塞杆上装设有活塞,活塞移动将球铰逐渐压紧,使第一支架和第二支架固定;所述第一支架和第二支架的内部关节部位设有压紧块;丝杠螺母移动会推动压紧块同时抵压第一支架内的活塞杆和第二支架内的活塞杆,压紧块通过斜面结构同时顶住两个活塞杆;
26、或所述被动调节支架为蛇形锁紧臂,所述蛇形锁紧臂包括能够调节穿刺引导模板位姿的柔性万向臂和能够锁紧或释放柔性万向臂的锁紧机构,所述锁紧机构采用拉绳锁紧方式,锁紧机构的驱动元件通过第二传动机构能够拉紧或松开拉绳,所述柔性万向臂包括多组依次首尾通过球形配合面相互铰接的中空万向节,拉绳一端贯穿所有中空万向节连接在蛇形锁紧臂的首端,拉绳另一端与所述第二传动机构相连接,所述第二传动机构为卷线轮结构、丝杠螺母结构、凸轮结构、液压机构、气动机构的一种或组合。
27、本发明的有益效果:
28、1、两个调节臂相互连接,在调节臂末端安装功能模块,通过调节臂对功能模块进行定位支撑,提高了调节臂的强度刚度和支撑能力,调节臂采用机械螺纹锁紧等多种锁紧制动方式(具体参见下述实施例中的制动方式及其相关装置),调节臂能够快速锁紧和释放每个自由度从而固定或调节功能模块的空间位姿。
29、2、提高了调节臂的安全性,调节臂安装在生物体腋下和头部侧边,能够减少空间占用;在调节臂末端安装功能模块,通过调节臂对功能模块进行定位支撑,功能模块为穿刺引导模块、内窥镜支撑架、牵拉器、摄像头模块中的一种或组合(具体参见下述实施例中的功能模块描述),能够实现手术中的夹持、延长、引导、监测功能,提高手术的安全性。
30、3、本发明调节臂通过固定孔能在底板上快速安装和拆卸,能够根据需要调整安装位置,满足不同人的需求,生物体通过束缚组件固定在底板上,束缚组件采用真空束缚袋、热塑性固定支架、半刚性材料的支撑体,避免生物体移动对手术造成影响。
31、4、本发明的功能模块的位姿调节方便、快速,功能模块容易拆卸,便于消毒,而且调节臂的末端与功能模块通过快速连接部连接,每组调节臂对应的快速连接部的第一啮合板和第二啮合板可在圆周方向多角度调节并锁紧,便于两组调节臂形成支撑结构,实现对功能模块的位置与姿态的任意调整与锁紧。
32、5、本发明使用时,将功能模块安装在两组调节臂的末端处,两组调节臂能够通过锁紧机构锁紧或释放,或锁紧机构通过程序控制实现同步控制锁紧或释放;本发明实现对功能模块进行位姿调整,提升了位姿调整的速率和准确性。
- 还没有人留言评论。精彩留言会获得点赞!