一种手术协作机械臂的制作方法
本技术涉及医疗器械,更具体地,涉及一种手术协作机械臂。
背景技术:
1、血管介入手术是一种微创影像引导诊疗方法,其具有创伤小、操作简便、介入部位准确以及术后愈合快的优点。
2、由于血管介入手术过程中会对术者造成辐射的影响,因此目前其中一种解决方式为采用血管介入机器人进行远程手术,常规的方式会使用机械臂固定从端机器人,通过控制机械臂调节从端机器人的初始安装位置,以满足不同的临床需求。
3、目前常用的机械臂包括单侧机械臂与双侧机械臂,单侧机械臂沿手术床移动时,容易存在倾覆的危险,安全系数低;双侧机械臂通常采用龙门架固定在手术床两侧的床边轨上,对床边轨的占用空间大,导致手术效率下降;在紧急情况下,术者需要上台手术时,现有的机械臂会影响术者的操作空间以及手术视野,此外,现有的机械臂只能控制从端机器人进行平移,对患者体型的适应性差。
技术实现思路
1、本技术实施例所要解决的技术问题是单侧机械臂安装系数低,双侧机械臂对床边轨占用空间大,影响医生上台手术的操作空间,对患者体型的适应性差。
2、为了解决上述技术问题,本技术实施例提供一种手术协作机械臂,采用了如下所述的技术方案:
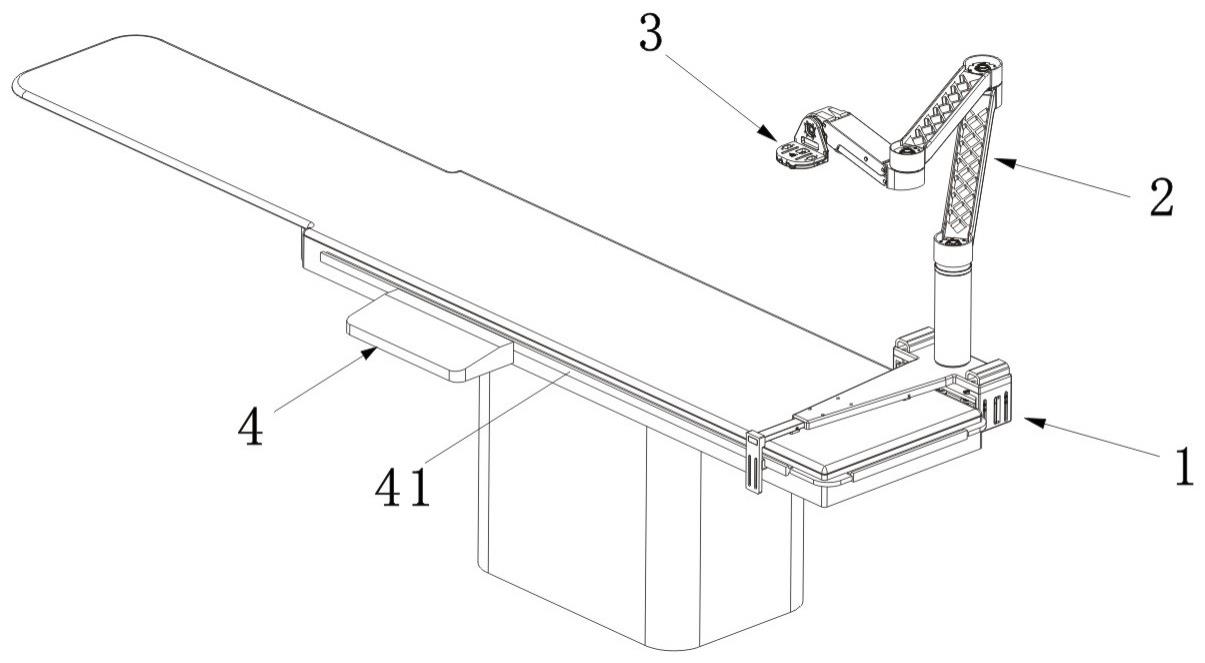
3、一种手术协作机械臂,包括承载机构、调节机构与从端连接机构;
4、所述承载机构装设于手术床上,所述承载机构与所述手术床夹紧固定;
5、所述从端连接机构用于固定手术从端设备;
6、所述调节机构连接于所述承载机构与所述从端连接机构之间,所述调节机构包括相互转动连接的水平调节部件与高度调节部件,所述水平调节部件与所述高度调节部件的其中一个装设于承载机构上,另一个与所述从端连接机构连接;
7、所述水平调节部件包括相互转动连接的至少两个支臂,相邻的两所述支臂之间形成避让空间,其中一所述支臂的自由端与所述高度调节部件转动连接,另一所述支臂的自由端与所述从端连接机构或所述承载机构转动连接;
8、所述调节机构与所述从端连接机构配合,用于对所述手术从端设备的操作位置与操作角度进行调节。
9、进一步的,所述高度调节部件包括第一连接关节、第二连接关节、上壳、下壳、直线伸缩组件与制动组件;
10、所述上壳通过枢轴分别与所述第一连接关节和所述第二连接关节铰接,所述下壳通过枢轴分别与所述第一连接关节和所述第二连接关节铰接,所述上壳、所述下壳、所述第一连接关节及所述第二连接关节构成四连杆机构,所述上壳与所述下壳之间形成容纳腔;
11、所述直线伸缩组件倾斜装设于所述容纳腔内,所述直线伸缩组件的两端分别连接于所述四连杆机构相对侧的两端点,所述直线伸缩组件的固定端铰接于所述第一连接关节或所述第二连接关节上,所述直线伸缩组件的伸缩端活动装设于所述上壳或所述下壳上;
12、所述制动组件装设于所述容纳腔内,用于限制所述上壳与所述下壳之间的相对活动。
13、进一步的,所述制动组件包括驱动件、制动凸轮、制动连杆组以及弹性复位件;
14、所述驱动件装设于所述下壳上;
15、所述制动凸轮转动装设于所述下壳上,且与所述驱动件的动力输出轴传动连接;
16、所述制动连杆组装设于所述下壳上,所述制动连杆组包括制动件,所述驱动件驱动所述制动凸轮绕自身轴线旋转,推动所述制动连杆组张开,以使所述制动件与所述上壳的对应区域抵接,实现限制所述上壳与所述下壳之间的相对活动;
17、所述弹性复位件连接于所述制动连杆组,用于驱动所述制动连杆组复位,以使所述制动件与所述上壳的对应区域分离,解除制动状态。
18、进一步的,所述制动连杆组包括连轴、对称布置的第一张开连杆与第二张开连杆以及对称布置的第一制动连杆与第二制动连杆,所述制动件包括第一制动件与第二制动件;
19、所述第一张开连杆与所述第二张开连杆分别转动连接于所述连轴上,所述连轴与所述制动凸轮的侧壁紧密贴合,所述第一张开连杆的另一端与所述第一制动连杆转动连接,所述第一制动连杆远离所述第一张开连杆的一端与所述第一制动件连接;所述第二张开连杆的另一端与所述第二制动连杆转动连接,所述第二制动连杆远离所述第二张开连杆的一端与所述第二制动件连接;
20、所述上壳对应所述第一制动件与所述第二制动件的位置均设有制动区域,所述制动凸轮推动所述连轴向远离所述制动凸轮方向移动,以推动所述第一制动件与所述第二制动件从所述容纳腔向外伸出,分别与所述制动区域配合形成制动状态;
21、所述弹性复位件的一端连接于所述第一张开连杆远离所述连轴的端部,另一端连接于所述第二张开连杆远离所述连轴的端部,用于驱动所述制动连杆组复位,解除制动状态。
22、进一步的,所述制动连杆组还包括滚轮,所述滚轮转动装设于所述连轴上,所述滚轮夹持于所述第一张开连杆与所述第二张开连杆之间,所述滚轮的侧面与所述制动凸轮紧密贴合。
23、进一步的,所述高度调节部件还包括限位组件,所述限位组件包括限位件与限位槽;
24、所述限位件与所述限位槽的其中一个设置于所述上壳上,另一个设置于所述下壳上,所述限位件穿过所述限位槽且沿所述限位槽滑动,用于限制所述上壳与所述下壳的相对活动距离。
25、进一步的,所述承载机构包括安装底座、夹紧部件与伸缩防倾组件;
26、所述安装底座装设于所述手术床上,所述夹紧部件与所述伸缩防倾组件夹紧固定于所述手术床的相对两侧,以使所述承载机构与所述手术床夹紧固定;
27、所述夹紧部件包括固定座、竖直顶紧组件、水平压紧组件;
28、所述固定座滑动装设于所述安装底座的底面,所述固定座相对所述安装底座沿竖直方向可调;
29、所述竖直顶紧组件装设于所述固定座上,包括第一把手、第一连杆以及至少一个竖直顶紧凸轮;
30、所述第一把手转动连接于所述固定座上;所述竖直顶紧凸轮转动连接于所述固定座,所述竖直顶紧凸轮为斜面凸轮,所述斜面凸轮的上表面沿竖直顶紧转动方向逐渐增厚,所述夹紧部件夹紧时,所述竖直顶紧凸轮的最高点与所述手术床相抵;所述第一连杆分别与所述第一把手和所述竖直顶紧凸轮铰接;所述固定座、所述第一把手、所述竖直顶紧凸轮及所述第一连杆构成四连杆机构;
31、所述水平压紧组件装设于所述固定座上,包括第二把手、第二连杆以及至少一个水平压紧凸轮;
32、所述第二把手转动连接于所述固定座上,所述水平压紧凸轮转动连接于所述固定座,所述夹紧部件夹紧时,所述水平压紧凸轮的侧面与所述手术床相抵;所述第二连杆分别与所述第二把手和所述水平压紧凸轮铰接;所述固定座、所述第二把手、所述水平压紧凸轮及所述第二连杆构成四连杆机构。
33、进一步的,所述第一把手或所述第二把手经过至少一次弯折形成阻挡件;
34、所述阻挡件用于限制所述第一把手越过所述第二把手向顶紧转动方向转动,以实现所述夹紧部件先水平压紧再竖直顶紧的夹紧过程;或,所述阻挡件用于限制所述第二把手越过所述第一把手向松开转动方向转动,以实现所述夹紧部件先竖直松开再水平松开的松开过程。
35、进一步的,所述从端连接机构包括安装支架、对接支架、锁止件;
36、所述安装支架转动连接于所述调节机构上;
37、所述对接支架装设于所述安装支架上,所述对接支架用于固定所述手术从端设备;
38、所述锁止件装设于所述安装支架上;
39、当所述对接支架安装在所述安装支架上时,所述锁止件的端部穿过所述对接支架,将所述对接支架锁止于所述安装支架上。
40、进一步的,所述安装支架上设有导向槽,所述对接支架对应所述导向槽位置设有形状契合的导向凸起;和/或
41、所述安装支架上设有至少两个定位孔,所述对接支架对应所述定位孔位置设有定位插销;和/或
42、所述安装支架上设有卡槽,所述对接支架对应所述卡槽位置设有扣件;和/或
43、所述锁止件包括导向座、锁止插销与弹性件;
44、所述导向座装设于所述安装支架上,所述导向座上开设有贯通所述导向座的插销导向槽;
45、所述锁止插销包括基座与导杆,所述导杆装设于所述基座上,所述导杆的端部的侧壁设置有至少两个锁止凸起;
46、所述弹性件套装于所述导杆上,所述弹性件连接于所述基座与所述导向座之间;
47、所述对接支架上设有装配槽,所述装配槽与所述插销导向槽形状相同且重合布置;
48、当所述对接支架安装在所述安装支架上时,所述基座装设于所述导向座上,所述导杆的端部与所述锁止凸起依次穿过所述插销导向槽与装配槽露出,所述锁止插销旋转一定角度后,所述锁止凸起与所述对接支架的顶面相抵,将所述对接支架锁止于所述安装支架上。
49、与现有技术相比,本技术实施例主要有以下有益效果:
50、本技术实施例提供的手术协作机械臂通过设置承载机构对手术床进行夹紧固定,以提高手术协作机械臂的安装效率以及安装稳定性,减少床边轨的占用空间,便于其他手术设备的安装以及避免影响医生的手术操作空间;通过设置具有水平调节功能和高度调节功能的调节机构,以便于手术协作机械臂能够根据患者体型进行调节,以提高手术协作机械臂的适应性;通过将从端连接机构转动连接于调节机构上,通过从端连接机构与调节机构的配合,对手术从端设备的操作位置与操作角度进行调整,以便于细长型医疗器械能够准确完成介入。
- 还没有人留言评论。精彩留言会获得点赞!