上肢智能康复训练方法和系统与流程
本发明涉及机器人控制,尤其是涉及上肢智能康复训练方法和系统。
背景技术:
1、目前,上肢智能康复训练机器人通过深度传感器采集深度信息获取人体关节点信息;根据获取到人体各关节点信息,区分需要获取的健侧手臂信息,根据健侧手臂信息计算关节的角度信息,通过一侧手臂各关节角度的变化,实现根据关节角度的变化带动患侧运动。
2、但是,这种机器人根据不同人的身高和臂长需要人工调节机械的位置和配置,操作过程比较繁琐;当切换患者时,需要向患者确认信息后才可以切换;以及健患侧镜像学习不精准,导致患者体验差。
技术实现思路
1、有鉴于此,本发明的目的在于提供上肢智能康复训练方法和系统,通过人脸搜索智能切换患者信息,通过相应康复动作的健侧轨迹带动患侧进行康复训练;通过人体三维关节点信息自动调整电机至患侧相对的空间位置,以及自动调整安全空间和机械位置,无需人工操作,提高用户体验。
2、第一方面,本发明实施例提供了上肢智能康复训练方法,应用于上位机,所述方法包括:
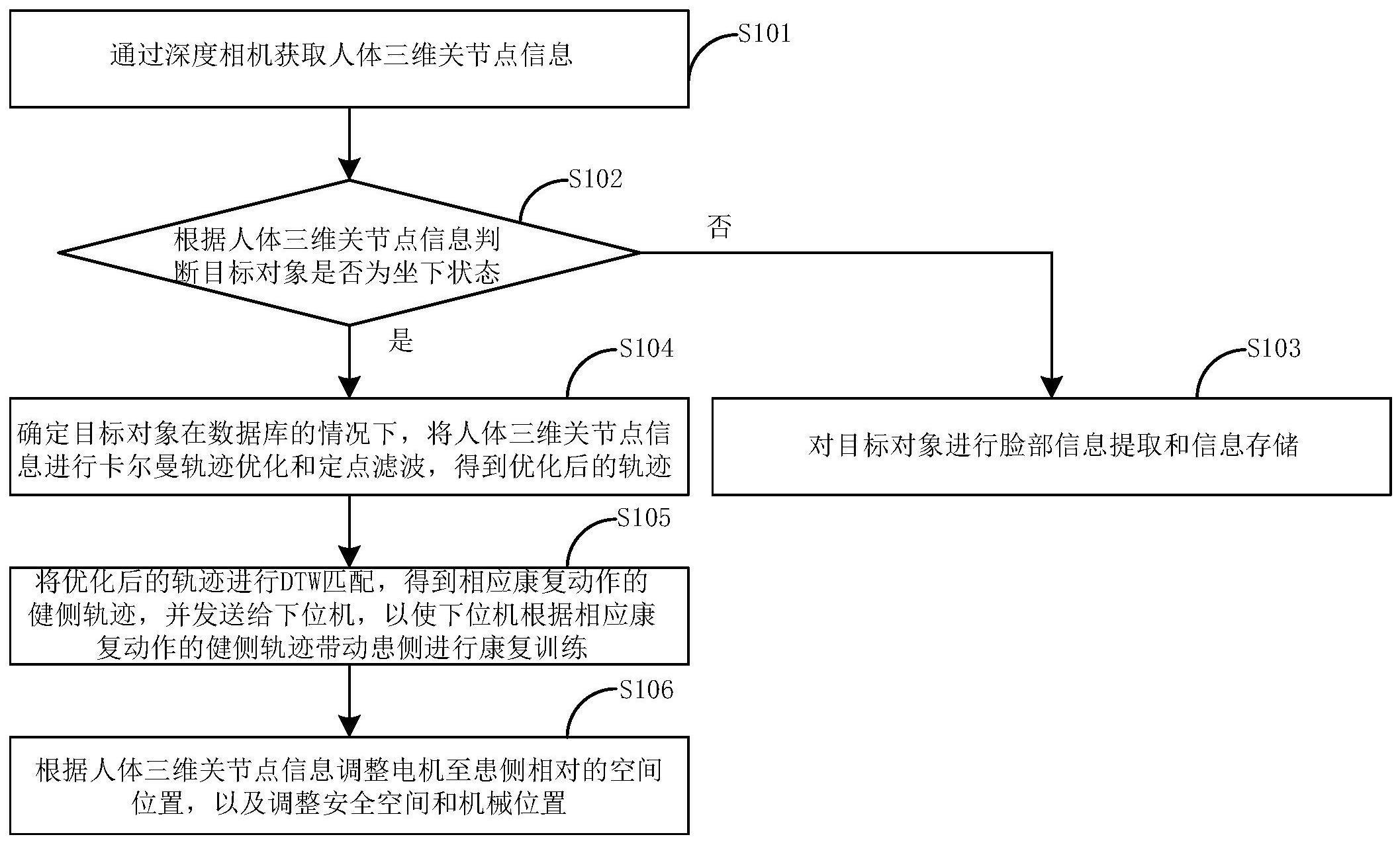
3、通过深度相机获取人体三维关节点信息;
4、根据所述人体三维关节点信息判断目标对象是否为坐下状态;
5、如果否,则对所述目标对象进行脸部信息提取和信息存储;
6、如果是,则确定所述目标对象在数据库的情况下,将所述人体三维关节点信息进行卡尔曼轨迹优化和定点滤波,得到优化后的轨迹;
7、将所述优化后的轨迹进行dtw匹配,得到相应康复动作的健侧轨迹,并发送给下位机,以使所述下位机根据所述相应康复动作的健侧轨迹带动患侧进行康复训练;
8、根据所述人体三维关节点信息调整电机至所述患侧相对的空间位置,以及调整安全空间和机械位置。
9、进一步的,所述人体三维关节点信息是以所述深度相机为圆点,所述人体三维关节点信息包括肩关节三维坐标、腕关节三维坐标和肘关节三维坐标。
10、进一步的,将所述人体三维关节点信息进行卡尔曼轨迹优化和定点滤波,得到优化后的轨迹,包括:
11、将所述肩关节三维坐标和所述腕关节三维坐标进行坐标转换,得到以所述肩关节为圆点,转换后的腕关节三维坐标;
12、将所述转换后的腕关节三维坐标进行卡尔曼轨迹优化,得到运动轨迹;
13、将所述运动轨迹进行定点滤波,得到所述优化后的轨迹。
14、进一步的,将所述优化后的轨迹进行dtw匹配,得到相应康复动作的健侧轨迹,包括:
15、计算所述优化后的轨迹的相邻帧的向量与矢状面,水平面和冠状面的夹角;
16、将所述优化后的轨迹的相邻帧的向量与矢状面,水平面和冠状面的夹角,与预存标准的相邻帧的向量与矢状面,水平面和冠状面的夹角进行dtw匹配,得到所述相应康复动作的健侧轨迹。
17、进一步的,根据所述人体三维关节点信息调整电机至所述患侧相对的空间位置,以及调整安全空间和机械位置,包括:
18、根据所述腕关节三维坐标调整电机至所述患侧相对的空间位置;
19、根据所述肩关节三维坐标、所述腕关节三维坐标和所述肘关节三维坐标计算臂长和肩高;
20、根据所述臂长调整所述安全空间;
21、根据所述肩高调整所述机械位置。
22、进一步的,根据所述人体三维关节点信息判断目标对象是否为坐下状态,包括:
23、根据所述人体三维关节点信息设置目标区域;
24、判断所述目标区域中的所述目标对象是否为所述坐下状态。
25、进一步的,对所述目标对象进行脸部信息提取和信息存储,包括:
26、当所述目标对象为新用户时,对所述新用户进行脸部信息提取,得到所述新用户的脸部特征信息;
27、获取所述新用户的三维关节点信息;
28、根据所述新用户的三维关节点信息计算所述新用户的肩高和所述新用户的臂长;
29、将所述新用户的脸部特征信息、所述新用户的肩高和所述新用户的臂长进行存储。
30、第二方面,本发明实施例提供了上肢智能康复训练系统,应用于上位机,所述系统包括:
31、获取模块,用于通过深度相机获取人体三维关节点信息;
32、判断模块,用于根据所述人体三维关节点信息判断目标对象是否为坐下状态;
33、提取模块,用于当所述目标对象不为所述坐下状态时,对所述目标对象进行脸部信息提取和信息存储;
34、优化模块,用于当所述目标对象为所述坐下状态时,确定所述目标对象在数据库的情况下,将所述人体三维关节点信息进行卡尔曼轨迹优化和定点滤波,得到优化后的轨迹;
35、匹配模块,用于将所述优化后的轨迹进行dtw匹配,得到相应康复动作的健侧轨迹,并发送给下位机,以使所述下位机根据所述相应康复动作的健侧轨迹带动患侧进行康复训练;
36、调整模块,用于根据所述人体三维关节点信息调整电机至所述患侧相对的空间位置,以及调整安全空间和机械位置。
37、第三方面,本发明实施例提供了电子设备,包括存储器、处理器,所述存储器上存储有可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上所述的方法。
38、第四方面,本发明实施例提供了具有处理器可执行的非易失的程序代码的计算机可读介质,所述程序代码使所述处理器执行如上所述的方法。
39、本发明实施例提供了上肢智能康复训练方法和系统,应用于上位机,包括:通过深度相机获取人体三维关节点信息;根据人体三维关节点信息判断目标对象是否为坐下状态;如果否,则对目标对象进行脸部信息提取和信息存储;如果是,则确定目标对象在数据库的情况下,将人体三维关节点信息进行卡尔曼轨迹优化和定点滤波,得到优化后的轨迹;将优化后的轨迹进行dtw匹配,得到相应康复动作的健侧轨迹,并发送给下位机,以使下位机根据相应康复动作的健侧轨迹带动患侧进行康复训练;根据人体三维关节点信息调整电机至患侧相对的空间位置,以及调整安全空间和机械位置;通过人脸搜索智能切换患者信息,通过相应康复动作的健侧轨迹带动患侧进行康复训练;通过人体三维关节点信息自动调整电机至患侧相对的空间位置,以及自动调整安全空间和机械位置,无需人工操作,提高用户体验。
40、本发明的其他特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点在说明书、权利要求书以及附图中所特别指出的结构来实现和获得。
41、为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
技术特征:
1.一种上肢智能康复训练方法,其特征在于,应用于上位机,所述方法包括:
2.根据权利要求1所述的上肢智能康复训练方法,其特征在于,所述人体三维关节点信息是以所述深度相机为圆点,所述人体三维关节点信息包括肩关节三维坐标、腕关节三维坐标和肘关节三维坐标。
3.根据权利要求2所述的上肢智能康复训练方法,其特征在于,将所述人体三维关节点信息进行卡尔曼轨迹优化和定点滤波,得到优化后的轨迹,包括:
4.根据权利要求1所述的上肢智能康复训练方法,其特征在于,将所述优化后的轨迹进行dtw匹配,得到相应康复动作的健侧轨迹,包括:
5.根据权利要求2所述的上肢智能康复训练方法,其特征在于,根据所述人体三维关节点信息调整电机至所述患侧相对的空间位置,以及调整安全空间和机械位置,包括:
6.根据权利要求1所述的上肢智能康复训练方法,其特征在于,根据所述人体三维关节点信息判断目标对象是否为坐下状态,包括:
7.根据权利要求1所述的上肢智能康复训练方法,其特征在于,对所述目标对象进行脸部信息提取和信息存储,包括:
8.一种上肢智能康复训练系统,其特征在于,应用于上位机,所述系统包括:
9.一种电子设备,包括存储器、处理器,所述存储器上存储有可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现上述权利要求1至7任一项所述的方法。
10.一种具有处理器可执行的非易失的程序代码的计算机可读介质,其特征在于,所述程序代码使所述处理器执行所述权利要求1至7任一项所述的方法。
技术总结
本发明提供了上肢智能康复训练方法和系统,应用于上位机,包括:通过深度相机获取人体三维关节点信息;根据人体三维关节点信息判断目标对象是否为坐下状态;如果否,则对目标对象进行脸部信息提取和信息存储;如果是,则确定目标对象在数据库的情况下,将人体三维关节点信息进行卡尔曼轨迹优化和定点滤波,得到优化后的轨迹;将优化后的轨迹进行DTW匹配,得到相应康复动作的健侧轨迹,并发送给下位机,以使下位机根据相应康复动作的健侧轨迹带动患侧进行康复训练;根据人体三维关节点信息调整电机至患侧相对的空间位置,以及调整安全空间和机械位置。
技术研发人员:朱旭峰,汪建辉,刘玉钊,常志强,李鲁亚,杨森
受保护的技术使用者:安杰莱科技(杭州)有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!