一种医用腹腔镜持镜机械臂
本发明涉及医疗器械,具体涉及一种医用腹腔镜持镜机械臂。
背景技术:
1、目前腹腔镜微创外科手术是医疗技术研究热点,是未来手术发展趋势,这主要是由于微创医疗有诸多优点:诸如创伤小、住院时间短、恢复快、术后并发症少。但是传统腹腔镜手术中,主刀医生和扶镜手需要长时间配合,由扶镜手手持腹腔镜提供操作视野,主刀医师持器械进行操作。但是扶镜手(术中操作镜头的人)需要长时间保持一个姿势,是非常辛苦而又枯燥的。对于阑尾切除术、胆囊切除术等这样的手术,如果相应机械臂帮助操作镜头的话,只需要术者一个人就能完成手术,对于夜间急诊或人手相比不足的一些医院来说,不用配备额外的医护人员进行操作,降低人力成本。
技术实现思路
1、为了解决上述技术问题,本发明的目的是提供一种医用腹腔镜持镜机械臂,通过专门的器械夹持腹腔镜,高度角度等均可调节,便于在手术过程中的使用,无需额外的医护人员进行操作,降低人力成本。
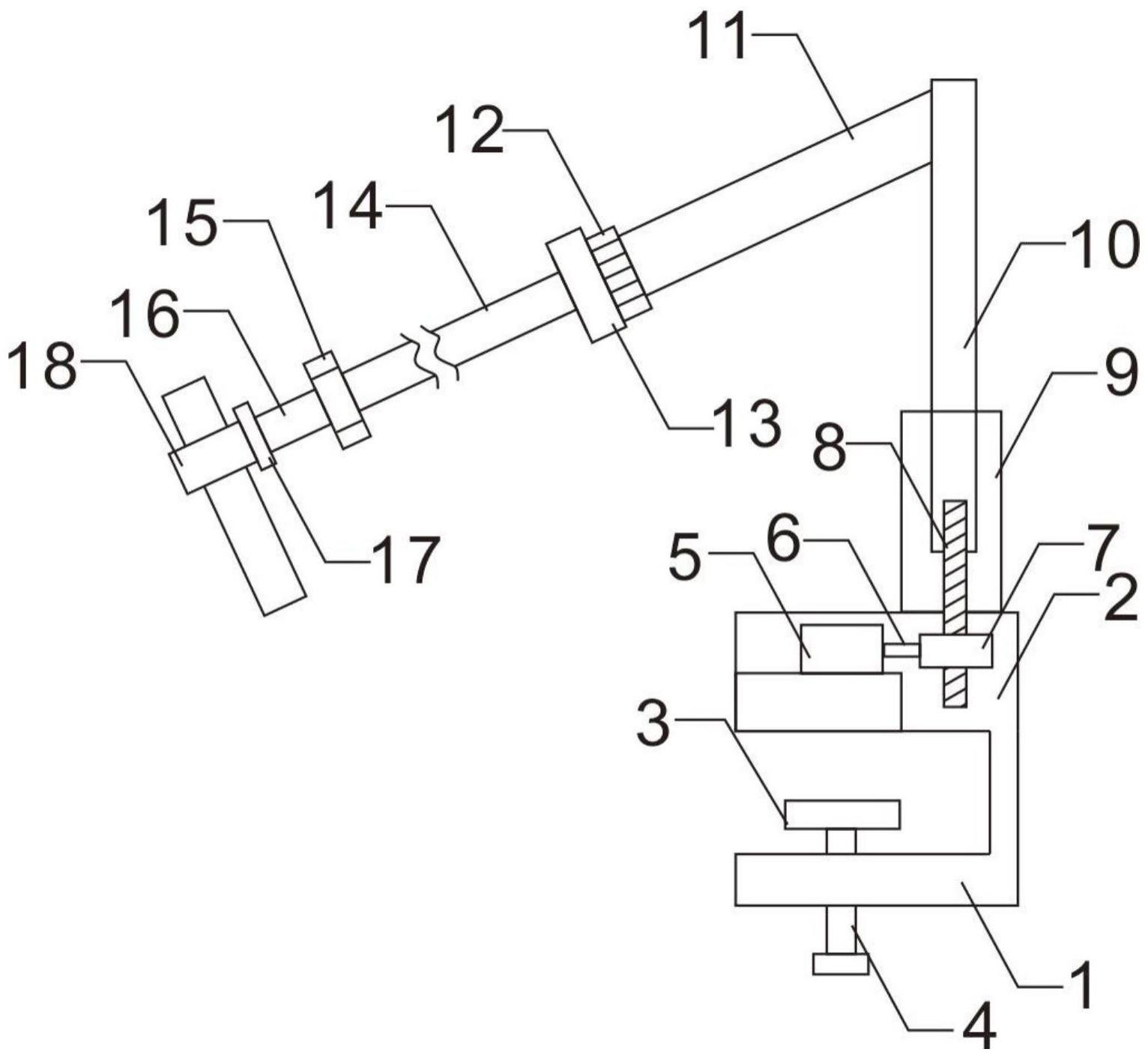
2、本发明解决上述技术问题的技术方案如下:提供一种医用腹腔镜持镜机械臂,包括一体成型的上夹持板和下夹持板,下夹持板上螺纹连接有压杆,压杆上设置有压板,且压板设置上夹持板和下夹持板之间;上夹持板上设置有固定柱,固定柱上通过升降组件活动设置有支撑柱,支撑柱上设置有连接杆一,连接杆一另一端通过球铰组件活动设置有连接杆二,连接杆二另一端通过固定组件设置有连接杆三,连接杆三上通过夹持组件夹持有腹腔镜;
3、球铰组件包括球铰支座,球铰支座固定设置在连接杆一上,球铰支座上的球窝中设置有相匹配的滚球,滚球外部四周设置有相匹配的螺纹片,螺纹片外部的螺纹上设置有相匹配的锁定旋钮,滚球上部与连接杆二连接,锁定旋钮拧紧时使螺纹片贴近固定滚球;
4、夹持组件包括扣环,扣环一端固定设置在安装座上,安装座设置在连接杆三上,扣环另一端通过卡扣与扣环的固定端卡接固定。
5、本方案的有益效果是:在使用时,通过上夹持板和下夹持板将机械臂夹持在手术台或病床等处,然后转动压杆使得压板压紧接触固定;连接杆一和连接杆二之间设置有球铰组件,拧紧锁定旋钮时螺纹片紧贴滚球,滚球无法转动达到固定连接杆二角度的目的,若是想要调节连接杆二角度,则可以拧松锁定旋钮,此时螺纹片与滚球之间存在间隙不再紧贴,滚球可以在球窝中进行调节转动,从而带动连接杆二进行调节,达到角度调节的目的;固定腹腔镜时,将腹腔镜放置在扣环中,将扣环两端对齐并通过卡扣固定,实现腹腔镜的固定;而机械臂整体的高度可以通过升降组件调节支撑柱的高度来实现,而连接杆二和连接杆三之间通过固定组件连接,固定牢靠稳固。本发明的机械手结构简单,使用便捷,实现了腹腔镜的夹持调节,可以调节其高度和角度等,不用专门的医护人员对其进行操作,降低了使用成本,便于推广使用。
6、进一步,升降组件包括升降电机,升降电机设置在上夹持板内,升降电机输出端传动连接有蜗杆,蜗杆上螺纹连接有蜗轮,蜗轮内螺纹连接有升降杆,升降杆上端与支撑柱固定连接。
7、采用上述进一步方案的有益效果是:升降组件即为一个螺杆升降机,当升降电机转动时,带动蜗杆转动,蜗杆转动带动蜗轮动作,同时实现升降杆的升降工作,实现机械臂高度调节;该功能实用度较高,便于装置的推广使用。
8、进一步,升降杆和蜗杆分别与蜗轮的内螺纹和外螺纹相匹配。
9、采用上述进一步方案的有益效果是:保证蜗杆能够带动蜗轮动作实现升降杆的升降,实现高度调节。
10、进一步,医用腹腔镜持镜机械臂上设置有控制器,控制器与升降电机通信连接。
11、采用上述进一步方案的有益效果是:通过控制器实现升降电机的开关,操作更加便捷。
12、进一步,固定组件包括固定座,固定座设置在连接杆二上,固定座下端设置有连接套,固定座内设置有相匹配的限位环,限位环设置在连接杆三上。
13、采用上述进一步方案的有益效果是:连接杆三上的限位环和连接杆二上的固定座是相匹配固定的,可以将限位环卡接在固定座内部,实现连接杆二和连接杆三之间的固定,固定更加稳定。
14、进一步,固定座和限位环为结构相似的多边形结构。
15、采用上述进一步方案的有益效果是:相似的多边形结构能够保证限位环是能够卡接在固定座内,使得连接杆二和连接杆三固定牢固,避免出现卡接不牢固等问题。
16、进一步,固定座和限位环为正六边形结构。
17、进一步,连接套内和连接杆三上端设置有相匹配的螺纹。
18、采用上述进一步方案的有益效果是:连接杆二上连接套内的螺纹可以使其与连接杆三的固定更加稳定,对固定座和限位环的卡接进行补充,同时拆装方便,便于手术前后的安装和拆卸,使用更加方便。
19、进一步,扣环内设置有若干充气橡胶囊。
20、采用上述进一步方案的有益效果是:充气橡胶囊可以填充腹腔镜和扣环之间的间隙,使其固定更加牢靠,避免松动脱落等情况的发生;也可以通过充气橡胶囊填充不同型号腹腔镜与扣环的间隙,扩大机械臂的使用场景,提高适配度。
技术特征:
1.一种医用腹腔镜持镜机械臂,其特征在于,包括一体成型的上夹持板和下夹持板,所述下夹持板上螺纹连接有压杆,所述压杆上设置有压板,且所述压板设置所述上夹持板和所述下夹持板之间;所述上夹持板上设置有固定柱,所述固定柱上通过升降组件活动设置有支撑柱,所述支撑柱上设置有连接杆一,所述连接杆一另一端通过球铰组件活动设置有连接杆二,所述连接杆二另一端通过固定组件设置有连接杆三,所述连接杆三上通过夹持组件夹持有腹腔镜;
2.如权利要求1所述的医用腹腔镜持镜机械臂,其特征在于,所述升降组件包括升降电机,所述升降电机设置在所述上夹持板内,所述升降电机输出端传动连接有蜗杆,所述蜗杆上螺纹连接有蜗轮,所述蜗轮内螺纹连接有升降杆,所述升降杆上端与所述支撑柱固定连接。
3.如权利要求2所述的医用腹腔镜持镜机械臂,其特征在于,所述升降杆和所述蜗杆分别与所述蜗轮的内螺纹和外螺纹相匹配。
4.如权利要求1所述的医用腹腔镜持镜机械臂,其特征在于,所述医用腹腔镜持镜机械臂上设置有控制器,所述控制器与所述升降电机通信连接。
5.如权利要求1所述的医用腹腔镜持镜机械臂,其特征在于,所述固定组件包括固定座,所述固定座设置在连接杆二上,所述固定座下端设置有连接套,所述固定座内设置有相匹配的限位环,所述限位环设置在所述连接杆三上。
6.如权利要求5所述的医用腹腔镜持镜机械臂,其特征在于,所述固定座和所述限位环为结构相似的多边形结构。
7.如权利要求5所述的医用腹腔镜持镜机械臂,其特征在于,所述固定座和所述限位环为正六边形结构。
8.如权利要求1所述的医用腹腔镜持镜机械臂,其特征在于,所述连接套内和所述连接杆三上端设置有相匹配的螺纹。
9.如权利要求1所述的医用腹腔镜持镜机械臂,其特征在于,所述扣环内设置有若干充气橡胶囊。
技术总结
本发明公开了一种医用腹腔镜持镜机械臂,包括一体成型的上夹持板和下夹持板,下夹持板上螺纹连接有压杆,压杆上设置有压板,且压板设置上夹持板和下夹持板之间;上夹持板上设置有固定柱,固定柱上通过升降组件活动设置有支撑柱,支撑柱上设置有连接杆一,连接杆一另一端通过球铰组件活动设置有连接杆二,连接杆二另一端通过固定组件设置有连接杆三,连接杆三上通过夹持组件夹持有腹腔镜。本发明通过专门的器械夹持腹腔镜,高度角度等均可调节,便于在手术过程中的使用,无需额外的医护人员进行操作,降低人力成本。
技术研发人员:刘作良,谢雪虹,周何,李利发,唐诗宇,张雪,余睿鑫,赵晨皓,侯华芳,周彤
受保护的技术使用者:川北医学院附属医院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!