一种双视场的胶囊机器人系统的制作方法
本申请涉及胶囊机器人,尤其是涉及一种双视场的胶囊机器人系统。
背景技术:
1、双视场胶囊机器人是一种能够在人体内部自由穿梭,以对人体进行内窥镜检查和手术的医疗类机器人,相比较于传统的手术需要进行开刀来对病症加以处理,现在可通过双视场胶囊机器人通过口腔、肛门等人体通道进入人体体内,减少了对人体的损伤和减轻了患者的痛苦。然而在胶囊机器人进入到人体后,胶囊机器人大多是随着肠胃的蠕动而带动胶囊机器人随着蠕动的方向移动而移动,无法很好而又准确的对病人体内进行拍摄,且拍摄的图像较为随机,不具有一定的连续和整体性,医生在对病人进行诊断时,无法有效的判别,使得医生对病人的病情进行判断时造成了干扰,存在改进之处。
技术实现思路
1、为了解决胶囊机器人的驱动问题,本申请提供了一种双视场的胶囊机器人系统。
2、本申请提供的一种双视场的胶囊机器人系统,采用如下技术方案:
3、一种双视场的胶囊机器人系统,包括:移动外壳和驱动内壳,所述移动外壳套设在所述驱动内壳的外部,用于对驱动内壳进行保护,所述驱动内壳中包含双图像采集模块、驱动模块、控制模块和通信模块,所述驱动模块和所述双图像采集模块与所述控制模块均信号连接,所述通信模块与所述双图像采集模块和控制模块信号连接;
4、所述通信模块用于接收外界操作指令并传输至所述控制模块,所述控制模块接收所述外界操作指令并对所述双图像采集模块和所述驱动模块加以控制,并输出控制信号;
5、所述双图像采集模块接收所述控制信号并启动,以对人体内部状况进行采集,并输出图像采集信号至所述通信模块,以传输至外界;
6、所述驱动模块包括重心组件和步进电机,所述步进电机与所述控制模块信号连接,用于接收控制信号并启动以对重心组件进行调节,胶囊机器人根据重心组件的位置变化而产生位移。
7、优选的,所述重心组件包括重心球和连接单元,所述连接单元包含多个连接杆,并组成“米”字形结构,所述重心球可拆卸设置在一个所述连接杆上,所述连接单元的中心点开设有小孔;
8、所述步进电机的输出轴穿过所述小孔,并与所述连接单元固定连接,所述步进电机接收所述控制信号并启动,以使得与连接单元连接的重心球发生偏移,以改变胶囊机器人的重心。
9、优选的,所述驱动内壳与所述连接单元旋转方向一致的侧壁上开设有限位槽,所述重心球设置在限位槽中;
10、所述重心球与所述连接单元均采用磁吸结构,并通过磁吸结构将所述重心球与所述连接单元紧密连接,连接单元在步进电机的作用下进行转动时,使得重心球在所述限位槽内移动;
11、所述限位槽内还设置有磁石,所述磁石在所述限位槽内自由移动,所述磁石的磁极与所述重心球的磁极相同,且所述磁石与所述重心球的相斥力大于所述重心球与所述连接单元的吸引力。
12、优选的,所述限位槽内还均匀的设置有限位孔,所述磁石设置在所述限位孔中,并能够在自身重力的作用下在所述限位孔间移动。
13、优选的,所述磁石对所述重心球的相斥力小于所述磁石在重力作用下的重力,所述连接单元的磁极与所述磁石的磁极相反,所述重心球在所述磁石的相斥力的作用下,使所述重力块脱离所述连接单元并在所述磁石与所述连接单元的相互作用下,加速所述连接单元转动,并使得所述重力块与所述连接单元的另一个连接杆相吸附。
14、优选的,所述步进电机的转动角度为固定角度,并在胶囊机器人整体重心趋于稳定时,步进电机再次转动。
15、优选的,所述双图像采集模块包括双摄像采集单元和同步电机;
16、所述双摄像采集单元与所述控制模块和所述通信模块信号连接,所述双摄像采集单元接收所述控制信号并启动,对人体内部状况进行图像采集,并将采集到的图像信息通过通信模块传输至外界;所述双摄像采集单元包括大视场摄像头和小视场摄像头,所述大视场摄像头用于对人体内部状况的全面采集,所述小视场摄像头用于对局部出现状况的人体进行局部放大详细采集。
17、所述同步电机与所述控制模块信号连接,用于对所述双摄像采集单元进行角度控制,所述同步电机接收所述控制信号,以对所述同步电机的转动角度加以控制,所述同步电机在进行转动时调节所述双摄像采集单元的采集角度和采集方向。
18、优选的,当需要对所述双摄像采集单元进行角度固定采集时,将所述同步电机的控制信号与所述步进电机的控制信号相同步,使得所述同步电机的转动角度和转动频次与所述步进电机相一致。
19、优选的,所述连接杆上设置有移动滑块,所述移动滑块在所述连接杆上自由移动,与所述移动滑块相对应的驱动外壳的侧壁上设置有挡板,所述挡板在所述移动滑块滑落至所述连接杆的固定位置,所述挡板与所述移动滑块相互抵触,使得所述连接杆在与所述磁石作用下加速移动时,使得胶囊机器人发生加速移动。
20、综上所述,本申请包括以下至少一种有益技术效果:
21、1.通过将双视场的胶囊机器人分成移动外壳和驱动内壳两个部分,移动外壳对驱动内壳进行保护,同时也为驱动内壳内包含的双图像采集模块对人体内部状况的采集提供条件,驱动内壳内还包括驱动模块、控制模块和通信模块,通信模块用于与外界进行信息交互,当接收到外界指令时,通信模块将外界指令传输至控制模块,控制模块对外界指令进行分析,并根据外界指令输出对应的控制信号,双图像采集模块接收控制信号并进行启动以对人体内部状况进行采集,并输出图像采集信号至通信模块以传输至外界供医生进行查看,步进电机接收控制信号并启动以对重心组件进行调节,以使得胶囊机器人的重心位置发生变化并在重力作用下发生位移,为胶囊机器人的驱动提供了主动可控性;
22、2.借助重心球、连接杆、限位槽和磁石使得在胶囊机器人不具有动力源时,在重力的作用下使得磁石与重心球的位置关系发生变化,由于重心球、连接杆和磁石均采用磁性材料,在磁石和重心球之间的距离发生改变时,磁石与重心球的相斥力使得重心球脱离连接杆并沿着限位槽向远离磁石方向移动,而连接杆在磁石的相互牵引力的作用下迅速向磁石靠近,从而使得远离磁石的重心球与另一个连接杆相互牵引吸附,使得胶囊机器人的重心一直处于变化状态,从而使得在不具有动力源的状况下,胶囊机器人依旧能够移动,有助于胶囊机器人从人体内排出,提高了胶囊机器人的安全性;
23、3.综合利用连接杆上设置的移动滑块和与移动滑块相对应的侧壁上设置的挡板,在胶囊机器人不具有动力源时,磁石对连接杆的相互牵引作用使得连接杆加速向磁石靠近,设置在连接杆上的移动滑块滑动至指定位置,使得滑块与挡板相互抵接,在连接杆加速向磁石靠近时,在移动滑块和挡板的相互作用下使得胶囊机器人的转动速度增加,增加了对移动环境的适应性。
技术特征:
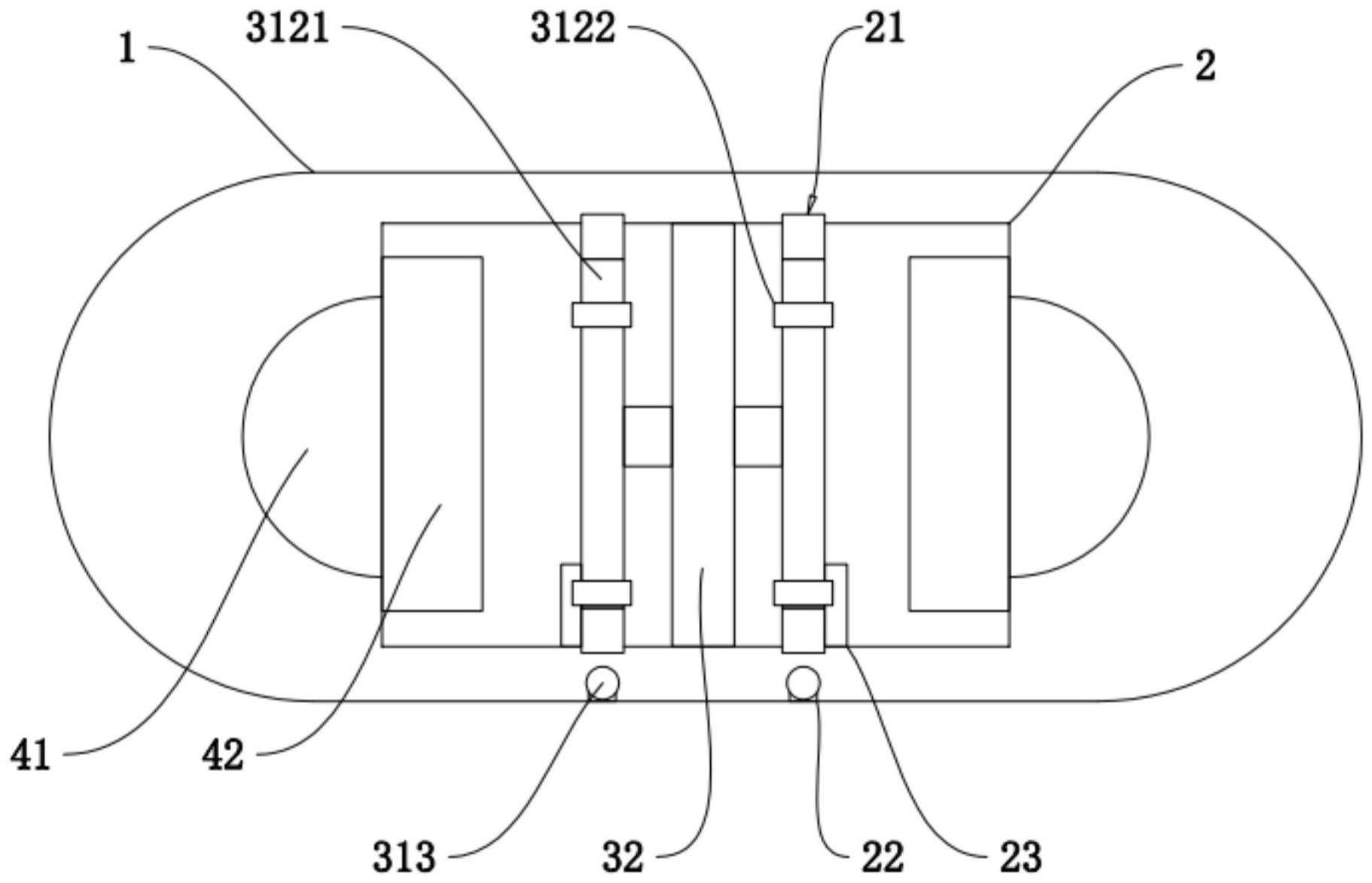
1.一种双视场的胶囊机器人系统,其特征在于,包括:移动外壳(1)和驱动内壳(2),所述移动外壳(1)套设在所述驱动内壳(2)的外部,用于对驱动内壳(2)进行保护,所述驱动内壳(2)中包含双图像采集模块(4)、驱动模块(3)、控制模块(5)和通信模块(6),所述驱动模块(3)和所述双图像采集模块(4)与所述控制模块(5)均信号连接,所述通信模块(6)与所述双图像采集模块(4)和控制模块(5)信号连接;
2.根据权利要求1所述的一种双视场的胶囊机器人系统,其特征在于:所述重心组件(31)包括重心球(311)和连接单元(312),所述连接单元(312)包含多个连接杆(3121),并组成“米”字形结构,所述重心球(311)可拆卸设置在一个所述连接杆(3121)上,所述连接单元(312)的中心点开设有小孔;
3.根据权利要求2所述的一种双视场的胶囊机器人系统,其特征在于:所述驱动内壳(2)与所述连接单元(312)旋转方向一致的侧壁上开设有限位槽(21),所述重心球(311)设置在限位槽(21)中;
4.根据权利要求3所述的一种双视场的胶囊机器人系统,其特征在于:所述限位槽(21)内还均匀的设置有限位孔(22),所述磁石(313)设置在所述限位孔(22)中,并能够在自身重力的作用下在所述限位孔(22)间移动。
5.根据权利要求3所述的一种双视场的胶囊机器人系统,其特征在于:所述磁石(313)对所述重心球(311)的相斥力小于所述磁石(313)在重力作用下的重力,所述连接单元(312)的磁极与所述磁石(313)的磁极相反,所述重心球(311)在所述磁石(313)的相斥力的作用下,使所述重力块脱离所述连接单元(312)并在所述磁石(313)与所述连接单元(312)的相互作用下,加速所述连接单元(312)转动,并使得所述重力块与所述连接单元(312)的另一个连接杆(3121)相吸附。
6.根据权利要求2所述的一种双视场的胶囊机器人系统,其特征在于:所述步进电机(32)的转动角度为固定角度,并在胶囊机器人整体重心趋于稳定时,步进电机(32)再次转动。
7.根据权利要求2所述的一种双视场的胶囊机器人系统,其特征在于:所述双图像采集模块(4)包括双摄像采集单元(41)和同步电机(42);
8.根据权利要求7所述的一种双视场的胶囊机器人系统,其特征在于:当需要对所述双摄像采集单元(41)进行角度固定采集时,将所述同步电机(42)的控制信号与所述步进电机(32)的控制信号相同步,使得所述同步电机(42)的转动角度和转动频次与所述步进电机(32)相一致。
9.根据权利要求2所述的一种双视场的胶囊机器人系统,其特征在于:所述连接杆(3121)上设置有移动滑块(3122),所述移动滑块(3122)在所述连接杆(3121)上自由移动,与所述移动滑块(3122)相对应的驱动外壳的侧壁上设置有挡板(23),所述挡板(23)在所述移动滑块(3122)滑落至所述连接杆(3121)的固定位置,所述挡板(23)与所述移动滑块(3122)相互抵触,使得所述连接杆(3121)在与所述磁石(313)作用下加速移动时,使得胶囊机器人发生加速移动。
技术总结
本申请公开了一种双视场的胶囊机器人系统,包括移动外壳和驱动内壳,移动外壳套设在驱动内壳的外部,驱动内壳中包含双图像采集模块、驱动模块、控制模块和通信模块;通信模块用于接收外界操作指令并传输至控制模块,控制模块接收外界操作指令并对双图像采集模块和驱动模块加以控制,并输出控制信号;双图像采集模块接收控制信号并启动,以对人体内部状况进行采集,并输出图像采集信号至通信模块,以传输至外界;驱动模块包括重心组件和步进电机,步进电机与控制模块信号连接,用于接收控制信号并启动以对重心组件进行调节,胶囊机器人根据重心组件的位置变化而产生位移。本申请具有解决胶囊机器人的驱动问题的效果。
技术研发人员:欧阳春,张钰宇,牛福永
受保护的技术使用者:中科复欣智能技术(成都)有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!