一种血管介入手术机器人的制作方法
本申请属于医疗器械,具体涉及一种血管介入手术机器人。
背景技术:
1、心血管病的主要治疗方法包括药物治疗、冠状动脉搭桥手术和血管介入治疗。其中单独的药物治疗对血管病变严重的患者疗效非常有限。冠状动脉搭桥手术属于开放式手术,需要进行开胸操作,病人在手术中创伤很大。血管介入治疗是一种微创手术,只需在病人股动脉开一个小孔,然后借助人体血管将导管导丝递送到狭窄病变部位进行扩张,从而恢复血流通路,血管介入治疗方案创伤小,术后恢复快。
2、尽管血管介入手术创伤小,恢复快,但该手术中目前针对导丝的夹持力度难以控制。
技术实现思路
1、本申请提供一种血管介入手术机器人,以解决目前针对导丝的夹持力度难以控制的技术问题。
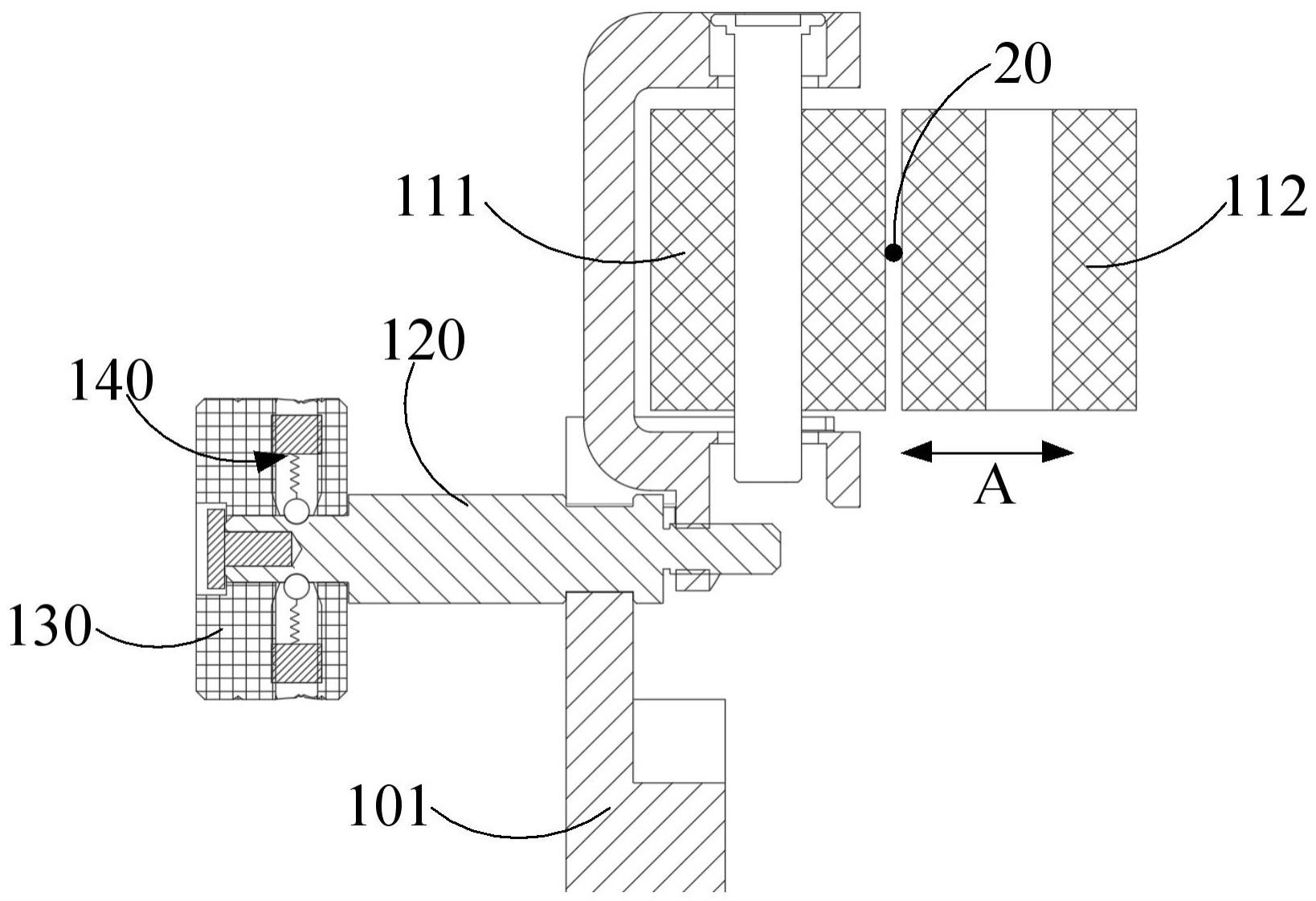
2、为解决上述技术问题,本申请采用的一个技术方案是:一种血管介入手术机器人,包括夹持组件,所述夹持组件包括:第一支座;第一夹持件,沿第一方向活动设置于所述第一支座;第二夹持件,与所述第一夹持件沿所述第一方向排列设置,所述第一夹持件和所述第二夹持件之间用于夹持导丝;驱动杆,转动设置于所述第一支座,且所述驱动杆沿所述第一方向延伸设置,所述驱动杆的一端与所述第一夹持件连接,所述驱动杆转动可带动所述第一夹持件靠近或远离所述第二夹持件;旋钮,转动设置于所述驱动杆远离所述第一夹持件的一端;弹性栓塞,设置于所述驱动杆和所述旋钮中的一者,并向所述驱动杆和所述旋钮中的另一者施加第一作用力,用于限制所述旋钮和所述驱动杆之间的相对转动;转动所述旋钮可带动所述驱动杆转动,直至所述第一夹持件和所述第二夹持件之间达到预定夹紧力。
3、根据本申请一实施方式,所述驱动杆上沿周向间隔开设有至少一个凹槽,所述旋钮上对应开设有至少一个通槽,所述通槽与所述凹槽对应设置,每个所述通槽内设置一所述弹性栓塞,所述弹性栓塞包括:基体,设置于所述通槽内;球体,活动设置于所述基体;弹性件,一端连接所述基体,另一端连接所述球体,所述弹性件处于压缩状态,所述弹性件可驱动所述球体伸出所述基体并卡设于所述凹槽内,以使得所述球体对所述驱动杆施加所述第一作用力。
4、根据本申请一实施方式,所述弹性栓塞可拆卸设置于旋钮。
5、根据本申请一实施方式,所述第一夹持件包括基座和第一摩擦轮,所述基座沿所述第一方向活动设置于所述第一支座,所述第一摩擦轮转动设置于所述基座;所述第二夹持件包括第二支座和第二摩擦轮,所述第二摩擦轮转动设置于所述第二支座,所述第一摩擦轮和所述第二摩擦轮之间用于夹持所述导丝。
6、根据本申请一实施方式,所述机器人还包括递送组件,所述递送组件用于驱动所述第一摩擦轮或所述第二摩擦轮转动,进而带动所述导丝沿第二方向移动,所述第二方向与所述第一方向相交。
7、根据本申请一实施方式,所述递送组件包括:第一齿轮,转动设置于所述第二支座,且与所述第二摩擦轮同轴固定;第二齿轮,转动设置于所述第二支座,且与所述第一齿轮啮合;递送电机,设置于所述第二支座,所述递送电机的输出轴连接所述第二齿轮。
8、根据本申请一实施方式,所述递送组件还包括:固定座,所述固定座具有第一侧板;底座,沿所述第二方向活动设置于固定座,所述第一夹持件和所述第二夹持件设置于所述底座,所述底座具有第二侧板,所述第二侧板与所述第一侧板沿所述第二方向相对设置;递送传感器,设置于所述第一侧板和所述第二侧板之间。
9、根据本申请一实施方式,所述机器人还包括搓捻组件,所述搓捻组件包括:第一齿条,沿第三方向设置于所述第一支座,所述第三方向与所述第二方向相交;第二齿条,沿所述第三方向设置于所述第二支座,所述第二齿条与所述第一齿条相对设置;搓捻齿轮,设置于所述第一齿条和所述第二齿条之间,且分别与所述第一齿条和所述第二齿条啮合;搓捻电机,用于驱动所述搓捻齿轮转动,所述第一摩擦轮和所述第二摩擦轮在所述第三方向上反向移动,以带动位于所述第一摩擦轮和所述第二摩擦轮之间的所述导丝旋转。
10、根据本申请一实施方式,所述搓捻组件还包括:旋转传感器,同轴固定于所述搓捻齿轮靠近所述搓捻电机的一端;联轴器,连接所述旋转传感器和所述搓捻电机的输出端。
11、根据本申请一实施方式,本申请采用的又一个技术方案是:所述机器人还包括:第一立柱,所述第一支座通过第一导轨活动设置于所述第一立柱,所述第一导轨沿所述第三方向设置;第二立柱,与所述第一立柱相对设置,所述第二支座通过第二导轨活动设置于所述第二立柱,所述第二导轨沿所述第三方向设置。
12、本申请的有益效果是:本申请的血管介入手术机器人包括夹持组件、递送组件和搓捻组件。夹持组件通过设置旋钮和弹性栓塞,可便于用户精准掌控对导丝的夹持力度,仅需转动旋钮至与驱动杆发生打滑,第一夹持件和第二夹持件之间即可达到预定夹紧力,提升操作便利性;当同一导丝或不同导丝需要的夹持力度发生变化时,可选择不同的弹性栓塞,用于施加不同的第一作用力,进而精准调节第一夹持件和第二夹持件之间可达到的预定夹紧力,满足不同情况下导丝所需不同夹紧力的需求。此外,通过递送组件和搓捻组件可精确的控制导丝的递送和旋转,操作导丝的过程中不会有疲劳和颤抖,精度高,能大幅缩短手术时间。本申请的血管介入手术机器人还可以实时检测导丝在递送和搓捻旋转时所受阻力,将该阻力实时反馈给主端的医生,从而能降低手术风险和不确定性,使遥控操作穿刺的过程更直观准确,手术更加安全。本申请的血管介入手术机器人结构简单,控制精准,大大提高了控制精准度和操作稳定性。
技术特征:
1.一种血管介入手术机器人,其特征在于,包括夹持组件,所述夹持组件包括:
2.根据权利要求1所述的机器人,其特征在于,所述驱动杆上沿周向间隔开设有至少一个凹槽,所述旋钮上对应开设有至少一个通槽,所述通槽与所述凹槽对应设置,每个所述通槽内设置一所述弹性栓塞,所述弹性栓塞包括:
3.根据权利要求2所述的机器人,其特征在于,所述弹性栓塞可拆卸设置于旋钮。
4.根据权利要求1所述的机器人,其特征在于,所述第一夹持件包括基座和第一摩擦轮,所述基座沿所述第一方向活动设置于所述第一支座,所述第一摩擦轮转动设置于所述基座;所述第二夹持件包括第二支座和第二摩擦轮,所述第二摩擦轮转动设置于所述第二支座,所述第一摩擦轮和所述第二摩擦轮之间用于夹持所述导丝。
5.根据权利要求4所述的机器人,其特征在于,所述机器人还包括递送组件,所述递送组件用于驱动所述第一摩擦轮或所述第二摩擦轮转动,进而带动所述导丝沿第二方向移动,所述第二方向与所述第一方向相交。
6.根据权利要求5所述的机器人,其特征在于,所述递送组件包括:
7.根据权利要求5所述的机器人,其特征在于,所述递送组件还包括:
8.根据权利要求5所述的机器人,其特征在于,所述机器人还包括搓捻组件,所述搓捻组件包括:
9.根据权利要求8所述的机器人,其特征在于,所述搓捻组件还包括:
10.根据权利要求8所述的机器人,其特征在于,所述机器人还包括:
技术总结
本申请公开一种血管介入手术机器人,包括夹持组件,夹持组件包括:第一支座;第一夹持件,沿第一方向活动设置于第一支座;第二夹持件,第一夹持件和第二夹持件之间用于夹持导丝;驱动杆,转动设置于第一支座,驱动杆的一端与第一夹持件连接,驱动杆转动可带动第一夹持件靠近或远离第二夹持件;旋钮,转动设置于驱动杆远离第一夹持件的一端;弹性栓塞,设置于驱动杆和旋钮中的一者,并向驱动杆和旋钮中的另一者施加第一作用力,用于限制旋钮和驱动杆之间的相对转动;转动旋钮可带动驱动杆转动,直至第一夹持件和第二夹持件之间达到预定夹紧力,从而可便于用户精准掌控对导丝的夹持力度,满足不同情况下导丝所需不同夹紧力的需求。
技术研发人员:徐俭,孙步梁,廖志祥
受保护的技术使用者:苏州恒瑞迦俐生生物医药科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!